发那科机器人acc指令怎么用

粉丝3.4万获赞2.7万
相关视频
 00:48
00:48 01:14查看AI文稿AI文稿
01:14查看AI文稿AI文稿法拉格机器人电机编码器线,动力线损坏,或者是电池溃电导致机器人机械零点丢失,别慌,一分钟搞定。法拉格机器人零点标定,好,这个时候我们将机械式胶器切到手动通过 cut 键来切换坐标器,切换到关节坐标器,好,这个时候已经关节坐标器了,通过关节坐标器把我们每机器人的每个轴都打到机械零点 好,这个时候我们以继承的二轴和三轴为例,你看这个是继承二轴关节转动的这个地方,他有一个刻度线,我们通过手动操作把刻度线打对齐,上下对齐,这是二轴,好,这里是三轴 好。当我们继承所要标定的关节轴刻度线对准以后,我们回到继承的视角机,按慢六键往下拉,找到下一页, enter 下往下拉第六个系统,往右找到第三个零点标定,校准,按 enter 键进入,我们选,这个时候我们以单轴为例,我们选择第五个单轴零点标定,按 enter 进入,我们以 e 轴为例,把光标移动到零点标定位置,这个时候按零 enter, 再到 cell, 这个再按一再 enter, 好, 这个时候我们按 f 五执行,执行完了以后返回再下拉到第七个,按 enter 更新零点标定,结果四 f 四,好,这个时候我们的 e 轴零就已经变成零点了,好,按 f 完成,这个就是法拉格机器人机械轴的零点标定。
3090自动化狙击手 02:05查看AI文稿AI文稿
02:05查看AI文稿AI文稿上期视频讲了用镜像备份恢复到同一种机型配置里面,粉丝留言,镜像完后原点位置不同步,老黑今天给大家详细讲解一下零点脉冲复位更新的过程, 请老表们慢慢听我讲来这台机箱镜像的机型里面,先找到对应的六轴出厂零点数据,如上图所示啊,老表们一定记得拍照留一手啊!下面咱们正式进入这个镜像流程步骤啊,将存有镜像备份的 mc 卡插到机型控制柜里面对应的插槽上面, 然后将控制器断路器断开,记住啊,先按 f 一 跟 f 五,之后 再接通控制器的电源登录器啊,开机之后出现引导画面啊,选择第四项控制备份还原,然后再选择这个镜像还原。选择镜像文件存储路径的话,因为刚才我们插的是 mc 嘛,咱们这里面肯定要选择 mc 的 吧啊,记住啊,镜像过程中 切记断电或者拔插 mc 卡,否则镜像失败,你这个摄像机就变成板砖了,你最后又要重来一遍。最后提示,这个镜像成功之后,咱们返回到之前的镜面界面,进行一个能启动即可啊, 能启动之后的重点来了,各位老表拿小本本记住了,咱们先找到菜单里面的系统,再进入这个变量界面,通过快速查找,找到这个 d m r g r p 界面,依次点详细进入后再选择第四行再进入, 这个就是出场的零点数据,对应上面的编号输入进去即可,然后 界面之后第一行 f 四触发有效啊!最后咱们再进入这个零点标定界面,移动到最后一行更新零点标定,结果 这样一个完整的镜像恢复就完成了,老表们担心的位置不同步是不是也解决了?点关注不迷路,干就完了!
214机器人改命师-老黑 00:54查看AI文稿AI文稿
00:54查看AI文稿AI文稿什么甲方把机型程序给误删了,然后你掏出你的电脑,发现你自己的程序又不是最新的,你是不是就慌了? 老黑教你个小技巧,发那颗机芯调试里面这个备份功能有一个自动备份,咱们进入这个界面之后,把自动备份这个功能给起用, 哎。然后存储位置咱们就选择这个 f r a, 就是 控制器内部的存储。好吧,时间点可以选择早上啊、中午啊、晚上啊,任何一个时间点都可以, 频率的话咱们就直接设置一天一备份,我出现问题了之后,我直接恢复上一天的,是不是这个你就不怕了啊?这就是调试中积累的一个小技巧,防一手点关注不迷路,干就完了。
1699机器人改命师-老黑 01:18查看AI文稿AI文稿
01:18查看AI文稿AI文稿一天的牛马生活又结束了啊,继续分享法拉科机型入门调试小技巧, f 五编辑界面,今天把所有剩下的功能全部给你讲明白。第一个插入就是我可以在两个程序中间可以插入一行,插入可以插入一行, 也可以插入多行啊。查找功能是干嘛?我可以查找程序里面的一些因素啊,比如说信号啊啊,位置存器啊,我可以输入相关的元素,他可以快速查找啊, 替换是干嘛?替换,比如这个速度全都是百分之一百,然后我可以单独的手动输入这一行的,改成百分之五十,但是我我想让整体的程序全部变成百分之五十来用替换,一下子把程序里面全部搞定了,这个就效率比较高啊,下面有个备注行, 备注是干嘛?备注就通俗一点的就是屏蔽啊,标志符号就是前面是一个双斜杠,前面有双斜杠代表这个程序已经屏蔽,他不会去执行。如果你想取消就是取消备注,把那个双斜杠给取消掉就 ok 了吗? 以上就是 f 五编辑界面里面的相关功能,左上角图片可以看啊,我也会放到评论区里面,点关注不迷路,干就完了。
125机器人改命师-老黑 01:24查看AI文稿AI文稿
01:24查看AI文稿AI文稿每天下班第一件事就是给老表们分享法拉科机型入门小技巧。咱们今天讲法拉科机型镜像备份, 很多老表问我这两个备份有什么区别?老黑今天就跟你唠一唠啊!镜像备份它是系统级完整保护啊,比这个普通备份更全面,它包含操作系统所有参数,程序、 ro 配置、通讯、 零点、安全参数等等,一个都不漏啊!你的普通辈分,他只会保留你的程序跟参数,当你系统崩溃的时候,你的普通程序是救不回来的,但是进项程序他可能把你救回来啊! 第二点,如果你一台机型调试完之后,是同机型同配置的情况下,我们可以用把你这个程序镜像的这个另外一台机型,你就不用逐台编程,设设参数,你提高编程效率, 对吧?如果是系统升级、软件更新啊,功能加装前啊,这个一定是先要做镜像,避免你把这个机型刷成板砖了,明白吧?一句话来总结 日常咱们就做做普通备份,把关键节点,比如说升级调试啊,设备改造啊,必须做镜像备份,两个备份缺一不可,点关注不迷路,干就完了!
175机器人改命师-老黑 04:36查看AI文稿AI文稿
04:36查看AI文稿AI文稿好,先按通过实历程序来教大家怎么用这个速度设定指令。好,我们刚才已经新建好了一个程序,现在这这四个程序是空的,我们在这里直接写程序。 首先让机器人回到原点,我们用末五接按差补方式把它切换一下。好,这个速度是百分之五, 把师傅接通,点击插入按回车,好,回到原地,后门可以开时,让机器人移动到别的位置。 好,这时候我们用直线插普插入这条指令,这时候直线插普的速度是九十三, 在前面两条移动指令以后,我们就开始规定速度,后面的后面移动指令多用多用,那个规定的速度它怎么用呢?你点击命令 e 来点击移动,点击是 b 的, 这这个命令就出来了,但是这里呢,我们只能看到这个直线插补的个 v 的 后面速度,不能看到关节插补 v 接的速度,我们按下选择 好,这里写了关节速度呢,未使用 tcp 的 速度呢,等于二十三号,我们点击按选择好,选择微接 好,这时候呢,我们把速度把微接关节速度改到五十,按回车,然后 tcp 的 速度呢, 水杯改个值改大一点,二百七十八,按回车,然后继续按回车, 这时候这两个速度都出栏了,我们点击插入按回车啊,把这个指令斜按回去啊,这个时候我们可以看到这个速度指令已经设纯蓝速度,设纯蓝以后,我们将机器人移动到另外一个位置 啊,伊娃利,以后我们要插入这样移动指令,那操作移动指令呢?我们可以看到这里含末五 a 二 o e 还是等于九十三, 那这个一点都没变,这个时候呢,我们要点击编辑把这个显示速度这个星号去掉, 我们把位置点击也去掉吧。啊,这个时候我们看的只有一个末维啊,这个时候这个末维啊,你按擦补方式就能改变这条指令, 不管是莫维亚还是莫街,这里只有一条移动指令,这个移动指令的速度呢?跟这个 speed 后面的速度是一致的,设置的速度是一致的。好,我们现在是莫维亚,因为莫维亚呢,它是关呃 t c p 的 速度,那 t c p 的 速度就是 v 的 速度。二百七十八,好,先这样 点击插入按回车,那这条指令就是二百七十八的速度。好,又,我先又将机器人移个位置 啊,移完以后我们用关节擦补插入回车啊,这个时候这两道指令都输入进来了,我们再将机器人移动到一个位置, 这个时候我们可以用直线插补,假如我们把这个速度标记标回蓝的话,好门,再按插入 按回车,这个时候这条直线插补指令跟上面这条直线插补指令速度不是一样的,这条直线插补指令是九十三,上面这一条是根据这个速度来设定的。 v 等于二百七十八。好,先按程序写好了,我们来看一下效果,到底速度有没有变化。 好,这时候呢,我们调到在线模式,按启动。好,先把它调到在线模式,然后把是按下是否准备按,是否接通好按下启动按钮 啊,我们来比较一下,看一下机器人的移动轨迹,发现前面两个点的速度是非常慢的,后面两个点试完速度以后就很快了,最后面这个点也是用的 v, 等于九十三的。
 00:30查看AI文稿AI文稿
00:30查看AI文稿AI文稿发纳克机器人标准动作速度的修改,一,选择 f 一 点,这时左上角就会出现标准动作指令,然后再选择按 f 一 标准,这样四个标准动作指令就出来了,在这里就可以修改默认的速度了, 例如把光标移到一百上,然后输入二十,改好后按 f 完成。二,再按 f 一 点,这样就可以写入修改后的指令了,下面再写入的指令就是二十的速度了。
57工业机器人4S店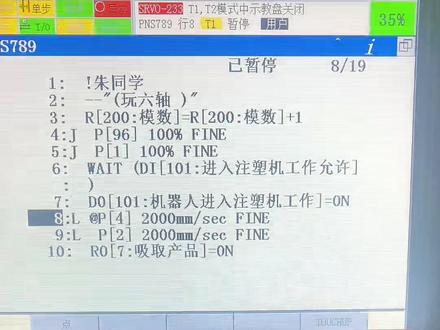 00:46查看AI文稿AI文稿
00:46查看AI文稿AI文稿吹牛逼呢,放在可能点位你能调的明白吗?来,全程一分钟教你们调试。首先我们把视角 t 打到手动,紧接着控制馈直接干到 t 二,好吧,不要问我为什么,我们先把程序走掉,取掉点的上方点,然后我们切换到单步, 不怕撞击,直接上 t 二连续走。紧接着我们找到程序的对应的坐标系,来切换一下坐标系,然后我们按背面的死能键加复位键开始点位的调试。 我们移动 x y z 对 应的对应轴,把位置调到准确,然后我们按的 shift 加 f 五就显示记录。 ok, 下课。
398朱⛱️同學 00:52查看AI文稿AI文稿
00:52查看AI文稿AI文稿法拉格继电器取料跑偏点位异常,别慌,一分钟搞定。法拉格继电器点位试校。好,这个时候我们以激光笔模拟你需要调整的继电器工具,我们要把这个点,现在他这个点错位了,我们要把这个点调到这个白贴纸的正中间。好,这个时候我们把射胶器打到手动 控制柜上面的钥匙切到 t 模式,然后找到我们需要修改程序的这个点位,把光标放在这上面,这个时候找到我们需要修改程序的这个点位,然后找到我们需要修改程序的地方。 好,这个时候我们已经将机我们的焊枪点位已经调到了我们这个想要留挪的这个位置的正中间。 好,这个时候我们回到视角记,按住 shift 键,然后按 f 五, touch up, 你 看这里 f 五对应的是 touch up, 我 们点击 touch up, 好, 他说这里说位置已经进入到 p 一 点,说明我们这个点位已经修改成功。好,这就是法拉格机器人的点位视角与修改。
1126自动化狙击手 02:53查看AI文稿AI文稿
02:53查看AI文稿AI文稿咱们今天继续分享之前的法拉科机型调试入门流程啊,所有的前期工作全部准备好之后,咱们是不是正式进入调试状态?第一点先干嘛?就是咱们机型的法兰上面的安装的工具需要做一个工具坐标系, 工具坐标系有三点法、四点法、六点法,还有直接输入法,如果你只是一个普通的搬运抓手,而且不是异形啊,就直接安装上面垂直法兰延伸方向的时候,这时候咱们直接采用直接输入法, 即法兰六轴延伸的方向为 z 正,比如说我延伸出去有五百,我们直接再用工具坐标直接输入法,任意方面加五百就 ok 了吧。如果它是异形工具啊, 然后咱们找机械拉一个 t、 c、 p 点,把对应的 x、 y、 z 这个数据输进去也能搞定。当然 如果是你要做视觉标定的话,这个时候老黑就建议你去要用标定针来去借,就是把抓手上面装一个标定针,然后地面上再插一个标定针,然后来孝顺他。 这个校准的话,误差的话咱们尽量的控制到零点三以内,正常的话,如果你做视觉标定的话,咱们要把误差控制到零点一类啊,这样的话你做二 d 标定跟三 d 标定的话,你的视觉误差就比较小,对不对?还有一个就是外部 t、 c、 p, 比如说像涂胶啊, 打磨呀,有些工具是固定在某个角度啊,这时候需要一个 g 六二四的选项,这叫外部 t c b 选项好吧。嗯,工具坐标咱们搞定了之后,现在是不是要弓箭坐标,有的要叫用户坐标是吧? 你要根据实际情况,比如说我机型是横平竖直的摆了,这个话让老黑建议之后,直接不用建这个坐标系,直接用默认的四 g 坐标系,用户坐标系就会零,知道吧?如果你这个机型摆的是斜的, 然后你周边的设备是横平竖直的摆的,这个时候你一定要去建一个坐标系哇,方便你调试的用。如果你是马剁的时候,这个工装做的非常 ok 的 话,咱们在这个马剁盘上建一个用户坐标系,方便你调试。 如果就是普普通通的搬运,老黑就是简单粗暴,连坐标系都不用去见,前提是机型必必须得垂垂直状态啊,如果是斜的话一定要见啊!以上就是调试要做的第一步工作,就是工具坐标跟用户坐标 点关注不迷路,老黑持续给大家更新入门调试流程,干就完了。
128机器人改命师-老黑 01:11查看AI文稿AI文稿
01:11查看AI文稿AI文稿下班下班,今天继续分享法拉科机型入门调试编辑界面的一些小功能啊,咱们今天讲复制剪切功能, 点开这个复制剪切之后,大家看到下面是有三个功能啊,一个是逻辑,一个是位置 id, 一个是位置数据啊,三者有什么区别嘞?我们给大家一一的去解答一下。 逻辑就是什么?比如说我把上面一行复制过来,但是里面是没有任何的数据啊,把当前的一个呃逻辑关系给它复制下来。位置 id 是 什么? 把当前的点位位置数据包括编号就是原封不动的抄下来,比如上面是 p 一 p 二,我复制下来也是 p 一 p 二,位置数据也有啊。第三个位置数据是干嘛的?位置数据就是我把上面两行复制过来, 位置数据是一模一样的,但是编号不一样,他会比如上面是一二,下面复制下来有可能就是五六或者七八。明白了没有?老表点关注不迷路,干就完了。
156机器人改命师-老黑 00:50查看AI文稿AI文稿
00:50查看AI文稿AI文稿民工,民工,我明明 r o 注字都写清楚了,为什么程序上面我看不到这个 r o 注字? 老黑默默地点了一下 f 五的编辑界面,里面有个注字啊,注字一点,你看上面是不是 r o 注字,它就出来了。但是这时候老表又说了,我注字能看清楚,但是我也看不到这个注字的这个 r o 信号的状态啊。 老黑又默默的点开编辑界面,这有一个 r o 状态,再打开这个是什么意思嘞?后等号后面的这个是你要求的状态,然后括号里面这个信号,哎,是你实际的状态, 这样的话信号有没有到位,看一下这个括号里面就可以了。点关注,不迷路,干就完了。
325机器人改命师-老黑 00:35查看AI文稿AI文稿
00:35查看AI文稿AI文稿大家好,今天给大家分享一下法纳克机器人如果在程序当中去指定程序执行的倍率,就是右上角这个倍率。如何在程序当中去指定这里呢?我们用到一个指令,点一下 f 一 指令,然后找到这个其他 这里需要一个这个第四个这个指令我们点击回车,然后后面呢是指定一个具体的值啊,这里呢注意呢是一个百分号,我们这个比如说现在百分之十,我们把它指定为百分之三十, 然后点回车,这样的话我们直行一下,可以看到这个背力呢就已经发生了更改。
172中科罗伯特-老段 00:27查看AI文稿AI文稿
00:27查看AI文稿AI文稿发纳克机器人负债没有设定报警的清除方法,一,选择 menu, 选择零下一页,然后再选择六,系统下面再选择七动作二,把这里的当前负债编号零改为一,选择 f, 五,选负债, 这时数字零会变为黑色,然后按数字一再按确定,这样当前负债编号就修改好了,报警也就消除了。
117工业机器人4S店 02:55查看AI文稿AI文稿
02:55查看AI文稿AI文稿发那颗机器人手动 t 二模式如何禁用?有粉丝问,发那颗机器人手动模式下 t 二模式如何禁用?听到这大家第一反应,为什么要禁用呢? 这是因为发纳克机器人控制柜的钥匙开关有三种模式, auto t 一、 t 二三种模式。 t 一 不管是点动还是程序运行,限制速度在每秒两百五十毫米,低速安全的。 而 t 二模式程序运行不受限制的,跟自动模式速度一样,特别手动调试运行时候程序写入速度指令, 机器人速度立马飙起来,很容易伤到人。总之有客户提出把 t i 模式借用,也是能够理解。方法一,硬件改造, 把钥匙开关后面线路六三和六比四拆除,可实现禁用。方法二,修改系统变量,点 f c t 按键选择重新启动,点击进入启动模式,找到控制启动。 进入控制启动,已进入控制启动,点 menu 键 选择四,进入系统变量,下拉,找到 s c r 这个变量选项,点击 enter 进入 下拉,找到 t i like m 这个目标变量。好的,找到把默认值灵感为 e, 点 f c t n, 选择冷启动,回到正常开机模式,也回到正常画面。 t 二模式已被禁用,若嫌麻烦,当然也阔以用后台逻辑控制新建一个 t 二 gin 的 程序,点 f e 指令选七,其他点七 palmitter name 选一, 按 enter, 按键盘输入 s c r t r like n, 结束写入 即用常数设为一,把程序导入后台逻辑即可 点运行就可以禁用 t r 模式了。今天课程就讲完了,谢谢观看!
273机器人工程师 00:55查看AI文稿AI文稿
00:55查看AI文稿AI文稿大家好,今天我给大家介绍一下法兰克机器人远程和本地模式去如何设置。法兰克机器人在进行自动运行的时候,通常有两种模式可以选择,一个是本地的自动模式,还有一种呢就是通过外部的设备,比如说 plc 来控制机器人的自动运行, 这样话我们需要进行一个设置,我们看一下如何选择,我们找到菜单下一页,然后找到系统,找到第五个配置啊,这里面有一个第四十二项本地或者远程的设置,然后现在是外部 i o 需要 把光标移动到这个选择的位置,然后我们点击选择,这里可以看到有这么四个选项,如果说我们需要通过 plc 来控制,我们需要把它选择设置为远程,如果说就是本地自动啊,就是通过控制微上的启动按钮来启动,即选的话可以选择本地。
100中科罗伯特-老段



猜你喜欢
- 3.0万Keanu