KUKA配置倍福
各位朋友大家好,今天我来给大家介绍一下贝服的这个远程 r o, 那这款远程 r o 的话主要是和我们的库卡接手在一起搭配使用的,当我们库卡接手买回来之后,我们通常库卡接手上的输入和输入信号都是由这个模块进行提供的。 把这个模块上的这个网口,他支持的是音色 cat, 直接插到库卡机前的插四四的端口 就可以建立连接,然后进行通讯。那我重点分两节课来给大家进行讲解,本次课主要讲一下硬件,大家知道硬件是总的一个组成部分, ok, 来看一下我手上这个模块其他的硬电组成有三个部分,最主要的话是一 k 幺幺零零这个藕和气,大家注意嘛?啊,这个藕和气第一部分第二部分的话是一个 el 幺八零九 输入模块,他有十六个输入,第三个是 el 二八零九, ok, 这款二八零九是十六输出, 我们这一个模块有十六个输入,十六个输出, ok, 大家注意啊,这个模块的话,只要这上面接入二四伏电源,这上面有个有一个正极和负极接入二四伏电源,然后把二四伏电源并到下面来,之后就相当于给整个输入模块和输出模块进行供电。 一个很关键的知识点,就是说这个模块他输出的是 pnp, 输入的也是 pnp, 就是说输入和输出都是 ps 四伏高电频输入或高电频输出, ok, 然后这上面还有红色的这个小按键一样,大家可以看啊这个按键,这个按键在拆卸的时候一定要把它 提起来,然后再进行安装。 ok, 今天主要给大家讲解一下这个模块的进键安装。好,现在是观看。

粉丝1.9万获赞12.5万
相关视频
 06:25查看AI文稿AI文稿
06:25查看AI文稿AI文稿啊,一起来看一下库卡这个背浮模块和配置。首先我们要去下一个这个东西 yes i, 然后下下来之后要去找到 这个项目,这个地址里面,嗯,很多人可能显示不出来这个这个 这个文件夹,你要查看里面的话,要把它隐藏的项目要给他点开能看到这个文件夹,然后再去找库卡罗布特 gmbh, 然后找到这个,最后再找到这个 e s i, 然后把刚刚的 从网上下的这一个 esi 给它复制一下,再放到这个里面去。 然后我们打开 book ratio 这个软件,找到这个 excess 里面 dtm, 嗯,我们来正常的话要搜索一下 这个过程不要急,让他慢慢搜索一下, 最近碰到了,所以拿过来跟做个视频吧。然后我们选择这个, 嗯,还有 这个月 幺八零九的那个, 然后还有一个二八零九二八八九 啊,这一个是输入的,还有一个是输出的。然后我们点击一下这个 ok, 然后 因为这个是虚拟机啊,我们现在连接的呢是虚拟机的这个项目, 你点一下,然后点击一下,打开, 双击一下,等它激活,或者右击设为激活项目。 然后我们在这个总线里面选择添加 这个叉十四 ready, 然后 在这个里面先添加这个幺幺零零 k 幺幺零零的这一个,然后 啊,是啊,都是里面吧,然后幺八零九这一个输入, 再添加一个幺八八九,再一个输出。 然后看一下你的背符模块,上面要跟他一一对应幺八零九八二九。然后 然后再点到这里的现场总线, 然后我们点这里的输入端跟这一个输入端,那这个是我们就从第一个开始配, 一共配十六个,然后再点开这一个输出也是一样的, 那这样我们 输入输出的话,输入输出的话就都已经配好了,就这样一一对应。然后比如说你要去 把这个 io, 嗯, io 的话,你可以在这里面进行更改 啊,那我们这个就讲到这里。
 01:11查看AI文稿AI文稿
01:11查看AI文稿AI文稿ethanet ip 库卡机器人和 ethan cat 贝福 plc 总线协议连接案例远创智控的 yceip m e ct 协议转换网关将 ethanet ip 库卡机器人和 etherceat 贝福 plc 无缝连接 一份的 ip 是一种适合于工业环境和对时间要求比较苛刻的应用的网络。而远创智控 yceipmect 通讯网关 是一款自主研发的 ethernetip 从战功能的通讯网关,它不仅可以实现 eternetip 和 etercad 的无缝连接,还可以将 eternetip 作为从战连接到 etercad 总线中。 此外,它还具有高度集成、即插即用、配置简单等优势,能够极大的提高工业通信的效率和可靠性。通过这款通讯网关,我们可以实现与多种 plc 无缝互联,完美解决工业通信难题。在 现代工业自动化领域,通讯协议的兼容性和扩展性变得越来越重要。这款通讯网关的诞生不仅提高了通信效率,更为我们打开了全新的通信可能。 原创智控的 yceipmect 通讯网关让我们的工业通信更加高效和可靠。如果你有任何相关问题,欢迎留言下载产品手册。
 01:54查看AI文稿AI文稿
01:54查看AI文稿AI文稿大家好,昨天我们讲解了库卡机器人和幺二零零之间常用的两种通讯方式, 那么今天我们来看一下幺二零零通过 r o 接线到底如何和库卡进行连接。 大家注意看我们的库卡机前的 r o 信号,其实就是有这个模块进行组成的,这是背负的 r o 模块, 主要组成部分有三个,第一个叫 e k 幺幺零零,藕和气给他供电用的。第二个 el 幺八零九是一个十六入的输入信号, el 二八零九是一个十六入的输出信号。大家注意啊,背负的输入和输出都是 pnp 的。 为了给大家证明,给大家看,我这边已经通上电了,哎,是否电源已经接上了,然后呢,我特地引了一根 p i 是福出来,大家应该能看得见,我把这 p i 是福碰到我们的输入信号,先碰一号眼角看到吗?灯点亮了对不对?二号、三号、四号、五号,大家能够看得见, 就是说我们背负的输入都是 pnp 的输入,那么正好我幺二零零这边大家可以看得见。幺二零零的,我们进上电源之后啊,四 l 加和四 m 之后,我们所有的 q 点都是 pnp 输出,那么正好我们可以把我们 幺二零零输出 q 点直接接到我们被福的输入信号上面来,然后啊,我们被福的输出的也是 pnp 信号,那么 pnp 信号要接到我 plc 的输入上面来,大家要注意啊,他接到我们 plc 的输入信号来的话,我们 这边有一个 em, 看到吗?公共端,这个公共端一定要接恩爱的私服,就是零服,这样的话相当于 pnp 出租, ok。
 01:15查看AI文稿AI文稿
01:15查看AI文稿AI文稿昨天我们讲解了背符的模块怎么拼,那么今天我们看一下一个完整的系统,这是一台公共机,这是一个分站。然后下面呢我们再挂了一个分站,用 either cat 进, either cat 出到下一个分站的 either cat 进。 在这里我们可以换一种方式,这是一台工控机,那么如果我们不想用工控机的话,因为有些人觉得工控机太大了, 可以换一个嵌入式 pc, 这是贝福的最小的嵌入式 p c, 大家可以把它看成是一台小 p o c c x 七千,它是一个基于 arm 的系统,那在这里我们可以看得到它本体呢?就 没有网口,或者说这个网口只适用于编程,所以我们要在这后面用一个 ek 幺幺幺零把它扩出来。那在这里呢,我们接了一个国产的模块, 所以使用背负的系统你可以有两种选择,一种是用公控机,一种是用嵌入 spac, 当然还有一个选择是用他的平板电脑,那也相当于一台公控机。
514NewMaking 03:28查看AI文稿AI文稿
03:28查看AI文稿AI文稿这一台一千二现货,这一台一万二,货期六个月,同样是进口的七百瓦十伏驱动器,同样走一次开的通讯,今天我们了解一下这个贝弗的驱动器怎么配置,用软件测试运行,再拆开看看一万二到底值不值。 插上二十四伏控制电源,单向二百二十伏的动力电源, 连接上电机的动力线,编码机线。贝福采用的是单电缆,这一点还是比较先进的,插上与电脑连接的网线连接电脑侧。 下一步我们就来开始配置这台驱动器。先新建一个工程,然后扫描连接到此台电脑上 面的驱动器,扫描到驱动器以后,点确认与电脑连接以后,可以看到驱动器显示的变化, 这时候系统会提示我们是否建立一个 n c 轴。选择在线运行, 需要勾选允许运行, 这时候四伏电机就进入死能状态, 下面需要选择运行的方式,是无限制运行还是点动运行,我们选择无限震转,然后要设定他的 转速,点击启动电机就可以运行了。看一下驱动器状态和电机运行的状态, 下面开始拆机,从顶上的三颗螺丝开始,顶部螺丝拆出以后,用瓶口螺丝刀把这个面板拿下来,这就是贝福的面板,这边是他的反面, 继续往下拆,拆除外壳一圈的固定螺丝,拆除外壳以后就可以看到它的主控制板, 如果要拆除这个主控制板,需要把风扇的焊接的线要拆下来。把风扇电源线从主板 上面拆除,拆除主板的固定螺丝,主板就可以顺利的拿下来了。这一块是他的 cpu 板,这一块板上面集成了二十四伏转三点三伏供电以及编码器的接口, 网络通讯以及输入输出的功能,这一块板就是他的驱动板, 取下驱动板可以看到八只用于供电的变压器,其中有六只给驱动供电,一只给刹车供电。这边是电流互感器,这个是一个抗干扰的线圈,用料还是比较扎实。 逆变模块采用的是西门康的模块,这个模块的特点是不需要焊接。好的。这台一万二的四伏驱动器已经给大家展示完毕,欢迎点赞关注!
608杰哥自动化 02:03查看AI文稿AI文稿
02:03查看AI文稿AI文稿大家好,我是公主家一路老师,这几天呢,有同学通过私信来跟我问一下我们的一个贝服自动化的一个产品,还包括他的课程啊,今天呢,我在这里给大家讲一讲我们贝服啊,他和我们的这个大家都知道的这个西门子,他是来自于同一个国家,都是来自于德国的, 风格呢,是不太一样的。西门子呢,不管是这个通讯协议也好,还是编程语音也好,他都是对对内的,不怎么对外,那么我们背府的话,他是兼容并续采用的是我们通用的这个 windows 系统, 然后呢支持我们标准的是 r e c 六幺幺三幺杠三的这个编程语言总线通讯,因为 cat 也是开放实时的,那么我们大家都认为这个世界是呃开放的,也是兼容的,所以我们这个 对付的话,应该将来是非常有这个前景的啊,你看我一下我们对付的这个产品,看这个是白色,然后有红色这种主题色,就是反跟我们这个之前 这个工业的这种黑色啊,灰色就是不一样,比较单调,跟这个沉闷,那我们这个是乳白色的这个呃机身的壳子,然后还有这里上面的话是我们的一个铝壳的,这个是格衫,就是散用用来散热的,就是给人的感觉就非常的高端,也非常的大气。那么这里呢是我们的一个 cx 二零二零的这个一个控制器啊,拿配了我们的一些这个 l 的模块,那么我们的是外观非常是 漂亮的,对不对?然后我们菱格科技的话应该成立二十年,然后我们这个品牌呢代理了有将近十年的一个时间呢,我们这个产品性能应该是来讲是非常稳定的,我们 目前大部分用背负的这个客户啊,都取得了非常骄傲的成绩,然后他们的研发的产品通过时间差可以把竞争对手抛于脑后,所以这款产品是非常非常值得信任的。目前我们公仆正在招学习基地的话,呃,我们开 了贝服的一个课培训课程,那么我们呃目前来讲应该是国内唯一的一家非官方的一个贝服培训基地啊,然后我们学员呢也是来自于我们全国各地,另外的话我们零个科技的话,也 做了这么多年的背负代理了,然后我们有大量的产品库存,那么有需要培训的同学或者是需要购买这个背负标签的模块的可以跟我联系啊,谢谢大家。
225林格自动化陆鑫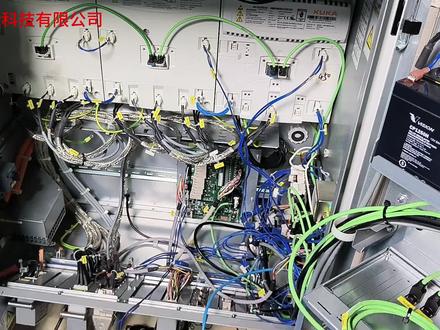 10:23查看AI文稿AI文稿
10:23查看AI文稿AI文稿大家好,这节课我们开始进入配置 io 模块的环节啊,那这个模块我们已经连接完毕了,看到没有,大家看到吗? 啊?我们的线输出出输入有一个开关啊,我们保留一个开关,输出一个继电器,哎,继电器待会要重新接一下啊,然后呢? 模块啊,没用过网线啊,已经连接到控制柜 ccu 板上面啊啊,接到这个口啊啊,具体哪个口?这个我们目前不需要太关心啊,第二排,第二排最右边这个口啊,这个后面我们 还会讲有关控制会里面的这个电器接线,那么连接供电,大家看到啊,我们采用内部供电, 所以,呃,我推荐大家呢,尽量不要用,那像我这个呢,只有一个输入,一个输出的情况下,他故障率呢?还是很低,那我们现在用内部供电来测试一下啊,我们从 sib 板上面引出来的一根 啊,大家可以回顾到第二章我们学的这个内容,是不是 siv 版,我可以继续向向后来扩展这个电源,那现在我们刚好利用到这个知识,好向后扩展那个直流二十四伏的一个电源啊啊,准确来讲他是二十七伏啊,但是标签的时候我们可以做二十四伏, 那这个输入输出连接完毕之后,我们就可以可以开机啊,开机,把开关转换一下,开机,然后呢我们进入配置的环节, 正常情况下啊,如果你不配置这个 io 模块,哪怕我这个开关有信号,输入模块有信号,他也是没反应啊,这些人收不到。 好,现在呢,我们拿一下试驾器给大家看一下啊,试驾器拿一下, 现在呢进入开机的环节, 好,现在开机完成啊,我们这开机速度是杠杠的,我们用的是固态硬盘啊,好,开机是正常的, 开机正常之后我们打开输入输出端口给大家看一下啊,显示输入数字输入端, 数字输入输出端,数字输出端啊,我们来看啊,输出就更不用想了,我们先看输入输入,我们不是接了一号口,对吧?现在我们去转换一下开关,看一下一号口有没有信号啊,我们看是要切上面 转换了是吧?模块上面是有信号了,大家注意看模块,是不是模块有信号了啊,模块亮了好,再把它灭掉。 哎,模块是不是亮了?模块亮了,你看这条线亮不亮。 试药器没信号说明什么?说明模块还没有配置进去,现在光模块有信号,有试药器,收不到啊,机器人收不到,那也没有用,所以我们要配置这个信号啊,配置他才会收得到,你不配置无法收得到。 那现在我们进入配置的环节,怎么去配置,我们要准备什么东西?首先要准备的是一根网线啊, 网线自己准备,随便普通的网线都可以一头连接我们的 kli 端口,大家注意看, kli 是酷卡线路接口啊,专门供我们调试连接外部设备用的,所以网线连接 k ai 端口,网线的另外一头连接到我们的电脑啊,连接到电脑啊,电脑最好是用这种自带网口的,笔记本是最好的啊,不要用这个 usb 转,实在没有,你用 usb 转也可以,只不过不稳定。 好,这是硬件要准备的东西,网线和一台电脑软件我们要准备什么东西呢?大家注意看啊,屏幕,电脑屏幕上面,桌面上是不是有三个文件啊? 三个文件,第一个贝芙 ek 幺幺系列,第二个贝芙 el 幺系列,第二,第三个呢是贝芙 elr 系列。第一个啊,第一个,我们 第一个是一一开幺幺零零系列的,这个 设备说明文件我们要准备好。第二个是输入模块 el 幺八零九啊,输他的设备说明文件。第三个呢是输出模块 elr 八零九的一个输出模块。这三个文件啊准备好。 那么这三个文件从哪里来?这三个文件如果说啊,你会下载的话,你可以去贝福官网去下载,只不过贝福官网都是英文版的啊,你看你要看得懂英文,如果说你自己下载比较困难的情况下啊,你可以去找我们啊,这三个文件是可以免费提供给你们的 啊,可以私信在抖音上,我们的公众号都可以啊,抖音号都可以。准备好这三个设备说明文件准备好之后呢,我们就可以进行配置了, 怎么配置啊?我们看电脑屏幕 这个灯往那边挪一下,对,好,这样的话我们屏幕就看得清楚一点啊,否则像刚才这个灯老是照着啊啊,现在我们是灯,是不屏幕不反光了啊,怎么去配?大家看屏幕 准备我们的酷卡机器人编程和配置软件,我可维修六点零啊,只只要下载六点零就可以啊,有些啊,有有点基础的同学,他可能下了五点零,四点零都有。 好,我们只要下六点零就可以,因为软件是下下接容的,五点零四点零的功能六点零都支持,但是六点零有的功能五点零,四点零是不支持的,所以下六点零就可以了,下最新版本的六点零,下好之后安装, 安装完毕,那么就像现在就可以看到这个软件的图标,是吧?好,接下来呢,我们要进入控制面板啊,在配置之前,我们要设置机器人的 it 地址,点击网络和 internet 啊, 网络和 internet 好,点一下,点击网络和共享中心,点击已太晚, 我们看一下当前采用的 ip 啊,点击属性,点击里面的 ipv 四 internet 协议版本四, 双击进去,当前是自动获取 ip, 我们要调到手动状态,那 ip 地址设置多少?我们看试教器上面试教器,试教器,我们要确定机器人在哪, ip 怎么去确确定呢?先登录管理员权限配置用户组, 选择管理员,输入密码 k u k a, 对密码 k u k a, 按回车 好进去了。进去了之后呢,我们要点击主菜单,然后投入运行, 里面有个网络配置啊,我放大给大家看好,搜上有个网络配置,点一下好好进入这个界面,对吧?这个界面呢就是我们的 网络接口设置界面了,那从这个界面大家可以看到机器人他默认的 ip 地址是多少呢? 就是当前看得到的这个 ip 地址,幺七二点三,幺点幺点幺四七,此网野马二五五点二五五点零点零啊,这个我们要记住,如果熟悉的话 啊,那就直接记到脑海里面就可以了啊。查看好机器人 ip 地址之后,我们不要去修改,一般情况下不要修改啊,除非特殊需求,那机器人端我们可以不用管,然后看电脑端,电脑 关了,我们在这个 ip 地址这里设置成手动,也就是使用下面的 ip 地址,点击 ip 地址输入框,输入幺七二点三,幺 点幺,机器人是幺四七,我们就不能设置幺四七,设置幺四七的话就冲突啊,我们可以设置其他的地址,那其他地址他并不是随便可以设置的,他有个范围,零到二五五,那一般零我们不用二五五也不用,那么用一到二百五十四,随便用 一到二百五十次里面随便一个,但是不要与机器人冲突,比如说我们设一百,机器人不是一百零四十七吗?我们设一百。好,这样就可以了,然后点击下方的中网验码,点一下,他会自动获取中网验码啊,自动获取中网验码之后,我们点击 屏幕下方的确定,再点一下确定,这样的话就设置完毕,关闭它,回到桌面, ip 地址设置完毕了, ip 地址设置完毕,接下来呢,我们就进入正式的配置环节。好,我们把它放到下一个小节进行讲解。
 00:40查看AI文稿AI文稿
00:40查看AI文稿AI文稿被福是伊泽凯的总线的创立者,可谓是引领运动控制。被福另一个出名的核心技术是软 tlc, 通过被福 tc 软件可以把电脑改造成 tlc, 总的来说就是用电脑做控制核心。 但是软 plc 成本太高,主要适用于视觉集成、 cnc 等多功能集成应用场景,与 twinkat 自动化软件所提供的运动控制解决方案相结合。 背负驱动技术代表着一种领先而又全面的驱动系统技术。 back hop 基于 pc 的控制技术是实现高动态性单轴和多轴定位任务的理想选择。未来备服 east caf 将是全球运动控制最亮眼的星星。
325人形机器人驱控系统开发 21:18查看AI文稿AI文稿
21:18查看AI文稿AI文稿这个视频我是用 pick 自带那个呃人机界面做了一个那个测试,测试功能,嗯,把里边那个常用的空间都把它给做出来,然后连接电量,可以给大家做一个参考, 当我们建立那个界面的时候,它底下那个引用是自动添加的一个 reseal, 后面都是 这里面要把这个 unicord 把它打过,要不然的话汉字会出现乱。 试图管理器里面要建立创建一个试图客户端,你创建好客户端的时候,你就可以在这里边贴上那个气势画面,把这个把上之前你建立好的画面里面你选一张作为主画面, 这样你在启动的时候他就可以跳下来,他就可以直接跳到左上面。啊,这个是那个使用指令可能大小,就是那个屏幕大小,也不是发的视频,我的笔记本是幺九二零乘九百的,所以我打的是幺九二零乘九百的, 这个是缩选一件事,缩选一件事,嗯,根据自己喜好来选,有个人的样式, 女人的话可以选,可以选,如果没有那么需要选 在这边的话,我们可以看到有很多啊,公共空间,还有那个指示灯,切换开关之类的。 如果这个工具箱你找不到的话,你就是在试图里面有个工具箱,这有个工具箱可以在里面在里面选, 那第一个拖进去的是那个按钮, 按钮的话可以用那个切换电量,也可以用来用来调整窗口。前面来讲一下这里面这个画面,画面设计很多,右边的话你可以你可以设置大小,我们现在这个画面是 它是一个固定的法, 这个首先首先也是在这个石头下面,这边这边当你把那个左边按住他右边的时候,你再会显示你的东西, 没事,他见了,真的, 这是前几天,如果是在 程序里面进行那个游戏界面的话,需要在前面加一个程序,就是把那个比如说咱们在那个主行中里面就是主程序里面建了一遍,你要把那个主行的面点一下,把这个加进去, 这个有输入配置收费。我们现在选择是剪一下鼠标的时候,或者是有个有个 pad 键, pad 键它就是可能在你按下去的时候是至零一啊,松开的话注意 这是文本,文本的话他就如果是嗯文本的话叫百,这个是百万号,如果是展图或者商品图之类的,可以 是 d 改文化 d, 如果是五点就是改文化 f, 如果是单位小哥哥是零,改文化零点零 f, 这个颜色可以可以,那个可以切换的就是为零的时候是蓝,是这种颜色就看了为 e 的是 alone, 看了, 以前在学好幺幺 要给他一个那个轻松点按他的看的是轻松点按 好,我们现在就是做好了,然后进行反弹,反弹的呢要把要在这里面有个这个是项目啊,睁开了 是我们测试这个项目,然后 logo 是我们在电脑上进行模拟的,如果说在 plc 上面进行做的话,就选选 plc, 把这个点开啊,选一个对应的 plc 就行,我们现在按下去只要松开久一点,这就可以了。 这个 top top top 就是那个切换点,就是点下里,点下里置为,如果说这就显示屏的话,点 他就只为一再点了一次只为零就切不起来。 嗯,谢谢,千万点, 我们在下一个测试吹 box, 吹 box 比较简单,勾选勾选,唯一勾选为零, 直接连电量就可以了。 下载完一定要把那个更新启动项目给打过,要不然的话你 p l c 一旦过量再次重启了。你这个程序就是上一次更改的程序啊,就没有了。 我这个空间里面可能有点问题,就是那个看他选电视里面选的,嗯,可能有些空间不支,不支持 这个我我们这些人都不用,不带去更改,他那个认识,大家知道这个功能怎么用就可以了 啊,这里面有高 高和宽都可以设置。 taste, taste 是文本, tiptop total tote, tote 过去是是那个指示,就是你鼠标放在这里的,它上面有提示, 下来,下来,下来, 你在这里边可以用来复制,把这个复制然后粘上这里啊,粘上这里。这里面显示的是什么值呢?就是我们当前选择的相差里面,比如第,比如第三个啊值,那么对应肯定有一个缩影, 要把这个所有的显示出来看,这里面有个变量变量就是我选第三个。第三, 因为他从零开始的话,第三个相当于对应的时候 我们这里要添加一个他审理,就是下拉菜单文本对应的生理成安全水平,那么确认权可以在里面用汉字把那个标出来。 他这个缩影是从零开始,我之前测试了一下,嗯,第一个是零零,第二个零三个版,他显示的话他会自动默认把这二者添加进去, 这就复制,复制完之后打开需要雷改, 我们再见识,见谅。 就是下次看到那个缩影程 id, 你的 id 再点一点点。 当你他当你历史一件的时候,他是自动下拉开通下拉那个菜,当你就是直接打开,然后这个是显示窗口,显示窗口一样 pass 改换号,用下转速码可以改换号币,然后配件连接, 其实头挺,其实也可以用变量来表示 他。这个当你下载了,佩服这个软件啊,有时候会特别莫名其妙的回答啊。有部单号你就在这里点一下那个激活废品或者是关掉重启一下就可以了, 选到不同那个指定的, 下面我们测试这个滑动下左右拉的时候电影实时变化, 有需要鉴定他们的店名的店名 电量。你刚刚建的电脑上面会有一张那个黑色素,要把这个黑色素黑色素给他伤了,要不然的话你掉进电量里要把这个 g v l 加进去 击飞啊。点什么能点?太难了。 这里面有外观字体也可以给我设置 the four 呢。不是不是变量字体,变量里边可以设置大小颜色。 当我滑动的时候这个电量是变化,但是我这边没有显示。为什么没有显示呢?因为我这边这个显示窗口跟这电量肯定有问题, 这边我去检查一下这个滑动,滑动跟空间看着人这边是没关系, 这里也是最大的最显示 范围是二十五到四百, 二十五个四百, 这个比较简单,直接把这个电量连上就可以了, 因为我这个鞋是二十五到四百,这个的话看到两双鞋应该是二十五到四百。 不管年轻人,如果你是前十年到四百万队友一定会说 零到四百,对于零到五到一百 这个按钮的话是这这个显示的话,就只是单显示的话,没什么说的,直接连边聊就可以, 这边有什么特别好看? 这个拖进来的时候,我们之前做的都是让这个把单钱值显示在这方向里面,我们要输入,在这个窗口里面输入一个值的话,怎么做呢?首先把鼠标点开,点那个输入配置,点第三个,然后这边的写变了, 输的情况下使用另一个变量点一下,然后把这个人变量给连接上,然后这里面有个最大的最小值,可以在里面写下, 这里面好多功能,你选一个吃咸蛋的千万, 我们可以点一下,在图片输入二十,我们上面没显示,再输入一个微信, 我们关掉键盘了,为什么没显示呢?看看我们电影连连,连是连,但是他 pass 都没有, pass 的是什么?但是串色里面显示这个值没有,所以要感化好。 d, 前面你可以加上一个注射单品纸,单品纸切好了之后,后面加一个末号就可以了, 但见之事,你们是会爱上我, 因为他的范围是五到一百,如果我们超过值,只要这就是他,慢慢变成红色,而且你也点不进去。 这是多选按钮,这是单选按钮。 v 六八的,这是两个,你同时只能选取一组,选取一个, 这里有一个 video button setting sentence, 就是你可以在这里面添加两个,不够选可以添加三个,四个可以,可以增减,也可以减少,把这个删除就可以了。 test, 原版 test, 我们做好了 ktv, 这个之前我选的 验试的时候可能有点问题,因为他前面不小心,你们在测试的时候可以换一组,换一个那个验试。
52星辰心海 15:00
15:00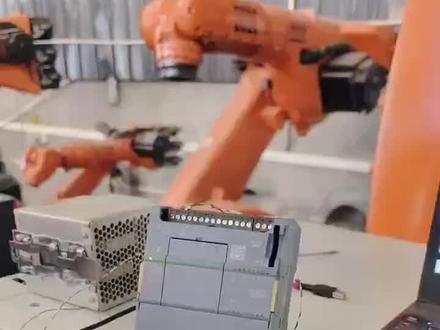 00:18查看AI文稿AI文稿
00:18查看AI文稿AI文稿这标题啊,这是在线监控的,然后极限这边我们设置一下,这里有个监控表,监控表这里调成二五五,对,长治一下,长治一下。
 13:40查看AI文稿AI文稿
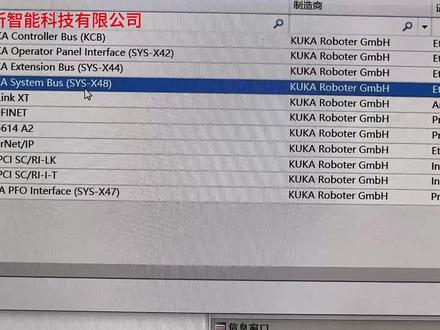
13:40查看AI文稿AI文稿那这个小节我们就讲机器人的具体配置环节啊,具体的配置如何去配置的?首先我们软件也安装好,然后第二个呢,是在控制面板里面设置好网络 ip 地址,这两步都设置好之后啊,网线呢?连接完毕, 是不是?网线我们连接连接完毕一定要和机器人连接好, 然后呢我们看试药器啊,大家看电脑,电脑端的操作, 电脑端的操作,我们先调一下这个角度好,调好了之后 双击这个,双击这个软件。哪个软件呢? mocha v 秀六点零这个软件啊,双击再双击一次,刚才没双击对好软件打开了, 等软件会刷新一下啊,打开他有可能会稍微慢一点,他要加载一下系统配置 这里把这个关掉啊,他打开了两个 好打开,这是软件运行打开之后的一个界面,这个界面我们什么都不需要管,把弹窗关闭掉,点击文件 下面有一个 import export 输入输出,点一下 这一步干什么?这一步就是为了导入输入输出模块的设备说明文件,所以我们要选择设备说明文件。导入 设备说明文件是不是大家看一下啊?放大,哎,是不是要看到啊?现在看清楚了, 导入设备说明文件就是刚才我们桌面上面准备的那三个文件。 好,准备好之后选择导入设备说明文件,然后点击继续好,选择你的文件保存路径,点击下方的搜索 好,他让你选择路径,找到桌面,桌面没有,哎,怎么没有了,我们明明放在桌面,对吧?啊,不要怕啊,下方右下角我们设置文件的类型改一下,改成哪一个呢?改成 倒数第二个 is a cat e s i 啊,我们默认是 p, 是 perfect g s d, 所以他搜索不到,因为类型不对,我们选择到手第二个点一下,哎,发现没有自动多了,出来了,自动扫描出来了。好,那我们要框选啊,框选这三个啊,全部给他导入,框选完毕之后点击打开 啊,是不是啊,这三个都已经添加到我们的窗口上面,然后点击继续, 好,继续继续完成,把所有的边牧全部安装,所有的设备说明文件全部安装 好,现在呢,已经安装完成,点击关闭,然后点击 extras, 有个 d m d t m 样本管理,放大给大家看啊。 express 工具 d t m 样本管理好,在这个样本管理里面呢,我们要查找一下安装的 d t m, 看一下啊,刚才那两个文件有没有导能够搜索的到啊?像我这个呢,之前安装过,所以他不一定搜索的到,因为我已经安装好了啊,如果你是初次安装,他会在这个左边这个区域呢,给你搜索的到。 为了确保万无一失,我们还是要做一下这个步骤啊,搜索一下这个文件,看能不能找得到。 哎,是不是啊,左边找到了几个东西,但不是我们想要的,那无所谓啊,如果说他出现什么 e k 幺幺零零 啊,那就最好。那说明什么?说明我们右边已经有了,看到没有?为什么有啊?因为之前我已经安装过了,如果说你之前没安装过你这些红色的啊,这些几个模块是没有的,没有怎么办?我们只要左边能够找得到啊, 只要左边能够找得到,我们点点下面这个两个向右的箭头全部移到外面啊,移到右边点一下,是不是他全部移到外 边,然后右边点击 ok 就好了,然后关闭软件。好,设置好要关闭一下软件啊,否则不生效。再一次打开这个软件 啊,第二次我们要开始配置了,刚刚呢是在设置一些参数啊,这次呢这个搜索窗口啊,项目浏览器不要关闭,我们点击搜索, 是不是出来一个可用的单元有个加号,我们展开这个加号啊,展开放大一下,展开再展开啊,一级一级展开, 可以看到有一个亮绿色的这个播放符号啊,二零二二杠零三二二七 x 这个项目啊,就是当前机器人在运行的项目,我们要把这个项目上载到软件上面,选择他,然后点击下方的打开,或者双击他也可以啊, 我们现在不双击选择打开。好, 现在正在加载项目啊,现在是空白,那一会他就刷新完毕。好,现在呢? 还没有加载完毕,稍微等一会。好,现在快啊,已经加载好了,已经加载好,大家可以看到我们这个项目配置,是不是啊?哎, 里面有很多个电机。那接下来双击哪里啊,大家注意看啊,双击哪里?我们注意看。看视频放大给大家看啊, 双击这个控制柜图标啊,双击他或者选中他右键也可以,右键选择设置为激活的控制系统,一定要选中控制柜图标。 好了啊,好了之后我们可以看到在这个总线结构,总线结构啊,总线结构下面现在挂了。哪哪个哪个总线呢?现在只有两个总线啊, 酷卡它是有六大总线的, k c b 啊,酷卡 controller bus、 酷卡控制总线,还有一个酷卡 system bus, 酷卡系统总线,简称 k s b, 这两个是最基本的总线,那除了这两个,我们还可以用得到 k e b cooker extension changing bus, cooker 扩展动线和 cooker laying interface cooker 线路接口,也就是 kli 啊,除了这两个,那还有 koikoni, 就是酷卡选项网络接口,那这个呢?往往是装视觉用的。还有 ksiksi, 是酷卡的服务接口啊,这个也是供我们去调试装设备用的啊。 那最基本的就是这两个 k c b 和 k s b, 这个是与系统运行有关的,那 现在我们还要加一个总线 keb, 因为我们的 ek 幺幺零零他是挂在的 keb 上面,现在没有 keb, 我们只能给他添加。选择总线结构, 右键点击鼠标选择添加。添加什么东西呢?我们看右边区域啊,右边区域选择酷卡 x 吞箱 bus, 酷卡扩展总线,也就是 x 四四。 是不是除了这个 a 三喷香 bus, 我们看到有 k c b 啊, k o p i 啊,还有 k s b 啊?不,这个是对库卡系统总线 啊,常用的这个总线在上面啊,我们还有其他总线, perfect net 总线啊, ins and net ip 总线啊,等等这些呢,都是它总线之 一啊,我们现在要添加的是 x 四四 a 喷香 box 模块,只能装在扩展总线上面。好,然后点击下方的确定, 点击确定按钮,这样的话我们是不是在右左侧是,是不是就有添加了酷卡系统总线?看到没有, 多了一个系统总线。好,我们选择 either cat 啊,左鼠标左键点击一下,选择它,然后右键再点击一下,选择添加。添加什么东西? 添加 e k 幺幺零零,哎,出来了,如果没有出来,大家在上面敲进去啊,搜索一下 e k 幺幺零零,这样是不是就给我们搜索出来,对吧?如果说 他不放在前面,那你就这样去搜索,选择最新版本 v 零点一八啊,零点一八,选择他零点一八是最新版本的啊,同时呢,我们要看一下他的这个电流 模块上面的虽然是零点五安,但是呢,版本这里零点一八的话,他这里只能是两安,这个无所谓啊, 我们保证他不超过零点完就可以了。虽然说这里呢,他给我们设置大一点,但无所谓。选择版本号对应零点一八,因为我们模块上面的应届版本号是零点一八, 所以软件上面我们也选择零点一八,选好之后点击确定啊,下方有个确定按钮。好,那 这样的话,我们展开 is the net 啊转啊, is a cat 展开一下,大家看到是不是多了 e k 幺幺零零,是不是多了这个选项?那 e k 幺幺零零它作为 is a cat 通信的偶合器,它要挂在其他模块的, 如果你不挂载,他是不可以进行其他通信操作,所以光有 e k 幺幺零零呢,是不起任何作用啊。我们要在 e k 幺幺零零下面的这个 ebus 点击一下,然后右键点击添加。添加什么? 我们的输入输出不快啊,像现在你这样翻的话,不知翻到猴年马月怎么办?像刚才那样输入搜索一 k 啊,不是一 kel 幺八零九,直接输入更快,是不是啊?一搜索他就出来了,选择最新版本下面微零点一八,然后 点击确定按钮,好多了啊,我们展开下方的这个 e k 幺幺零零一八四啊,展开一下,我们看到是不是多了,多了什么东西啊?多了 e l 幺八零九啊,放大给大家看,是不是多了 e l 幺八零九,对吧? 啊,这是我们的输入模块,再点击 e bus 右键点击添加,然后在这里呢再搜索 e l 二八零九。 哎,出来了,选择最新版本 v 零点一八啊,大家注意看,选择第三个啊,最新版本 v 零点一八,好了之后点击确定 啊,这样的话他又多了啊,二八零九,看到没有?幺一 k 幺幺零零 有了,幺八零九有了,二八零九有了。好,接下来我们就要进行通信映射,通信映射,那么先把这个画面来给大家缩小啊,缩小看一下整个屏幕电。
 14:13查看AI文稿AI文稿
14:13查看AI文稿AI文稿一下酷卡机器人 ezniteip 通信的配置, 首先我们关闭项目浏览器,关闭软件,重新开始。第一步打开我口碑秀六点零, 我们需要在这个软件里面把 internet ip 通信软件包把它给安装进来,点击工具 extras 备选软件包管理,点右边这个加号添加通信软件包,选择保存的 路径, 选择对应版本的软件包。 有一个点 kop 文件,就是 isnight 的通信软件包,选择打开他就开始进行安装,安装完之后你可以点击关闭 关闭,这时候可以看到他已经安装进来 关闭软件。如果此时联机的话,那么你要把当前机器人的项目上载进来,我这里没有联机,我就打开一个项目, 以这个项目为例进行讲解, 双击这个项目进行激活, 我们看看他选项里面配置的哪一些通信软件包,他有一个 perfect night 的通信软件包, 然后我们选中选项文件夹,点击鼠标右键选择 add 添加,添加 isn't it 通信软件包,然后 选中后点击添加点击式 好,这时候通信软件包就已经添加到项目里面来。 那么有的人可能会问,刚才我们不是已经添加了吗?刚才我们的操作是把通信软件包导到这个 vokv 九的安装库安装软件里面,也就是库库里面,我们现在这一步选项里面的操作是把 kil 这个 dj nike 通信软件包把它添加到项目里面,所以这两个是不一样的,两步都要做,缺一不可,而且必须要先添加到库,然后再添加到项目。 好了之后我们点击 boss structure 总线结构,然后右键单击鼠标,点击添加,添加,选择一个 natip, 点击确定, 然后双击也在内海外拼。 在这个第一个选项里面,我们要配置一些他的 ip 地址,以及他扫描的范围等等。 这个地方 began detection 润姐,而 dress 就是他的一个 起始的扫描地址,比如说你项目现场,他的一个只需要九二点幺六八点一点一,那么你就从点一开始扫描 幺九二点幺六八点一点二五四, 红线超时,我们就用默认两万毫秒就可以了。 scanner ip address 扫描器的 ip 地址,也就是相当于主站的地址,也就是 poc 的地址,输入 poc 的地址,假设他的地址 是幺幺九二点幺六八点一点八十八。好,这时候打好了, 在这个地方呢, ap sort of dress 就是他的一个网卡选择。如果此时你的电脑正在和 和你的机器人联网的话,那么他会显示出你本地的仪态网网卡,在这里,我当前是连线状态,所以没显示出来。 假如是在线的话,那么他会显示你的网卡,你一定要选择你本地物理网口的那个仪态网 网卡名称,假设说是第一个,我们选择第一个好了之后点旁边的学校卡 local slave 本本地的这个从站一 有个选项 autocomfiguration 激活配置,我们要,这里要选择激活设备的名称,输入一个设备的名称, 假设我们给他秘密为 krc 四 comment, 我们这里给他备注一下,你可以选择 krc 四 一样的。 好, 这里要不要设一个错误的字节,这里不,一般情况下也不需要,所以呢,你不需要勾选,把它灭掉就可以了。 如果你勾选的话,后面的有一个他的字节的偏移量从哪里?从零号字节开始偏移还是从往后偏移?如果你是第五个字节是复字节的话,那么你可以输入五,一般情况下,你不需要的话,这里就把它去掉。 背景书输出的一个数据,这里呢也不需要做设置, 就用它默认纸就可以。字节宽度 如果不需要这么多,比如说十六个就解决够了,那么你这里把它改成六就可以。 好,需要注意的是,当机器人这一端配好之后, poc 那一端有几个地方要注意,一个是两者之间要处于同一碗段, 然后呢, poc 那一端要输入正确的机器人的设备名称,要跟这里的统一 端口的设置,输入输出端口的设置要设置成一样,字节宽度要设置成一样。 好,那这这样的话配基本的配置就是就 完成了,他可以配置五个,从站的, 一般情况下是一对一通信,那么配置一个就可以,还有一个最后一个 local safety slave, 具有安全协议的需不需要配置?如果不需要配置,那么这个可以忽略,直接不要配置就可以。点应用好,完成之后,我们要进行 ioo 的映射, io 的映射跟之前讲的 perfect net perfect boss 第一批是类似的,选择数字收端, 左边数字输入端,右边选择现场总线,选择 youtube net ip, 可以 看到他是显示,输出出一起显示,所以我们要为了方便配置,我们把输出先暂时给他屏蔽掉,关掉输出,那么这里他只有输入总共十六个字节,但这边呢是布尔亮,所以没法一一对应,那么我们怎么办呢? 我们要把它打散,还有一种办法就是把左把左边的这个配置这些布瓦亮进行组合,组成字节的形式,那这样的话会慢很多, 我教大家一种方法,直接把右边打散,全部打算成布瓦亮,这样的话会快,怎么打算呢?选中第一个, 然后点击这个笔的符号, 然后在这个端口这个名称 这个地方,右键鼠标选择分割所有信号,点击式,然后确定, 这样的话他会自动分割输出出所有信号,把自己分割成多少量。 好,我们先配置输入端,我们看哪个端口没有占用,就从哪个端口开始配置,这些都是他之前配置 professor 的时候占用的端口。我们就从三百开始吧,三百开始 右边我们要选择输入端,所有的输入端, 总共是十六个字节,每个字节是八位,总共是二百五十六个位, 选所有。然后这边选择从三百开始拖动过去,放在三百上面,这样的话他就自动从三百开始进行映射,检查一遍,往下拖动 好,没有问题,没有问题,我们选择输出端的映射右边,我们把输出端放出来,关闭输入端。好,同样的道理,输出端也从三百开始映射, 选中三百,选中第一个,右边第一个往 下拖动选,按下 shift 键选最后一个,然后检查一下,看是不是框,选了所有好,然后把它拖动放到三百的上面,这样的话输出的映射也完成了, 我们再检查一遍,看有没有遗漏或者错位的,没有,没有的话,这时候就可以进行编译,注意看啊,编译有可能会报错,但是不要紧,我们只要看他报什么错误就可以。 编译报错报错无所谓,不用担心,而是项目现场中遇到报错,我们仔细看他的提 是就可以,他提示我们是什么呢?在生成代码前控制系统,他没有安装 cocopropynet 的一个软件包,所以与项目里面不对应,他就会报错。为什么呢?这个道理是因为项目里面他安装了这个文软件包, praday 的通信的软件包,但是我们的软件里面他没有装这个软件包,看到没有,我们只有一个呢 ip 的软件包,没有这个 prada 的软件包。这时候呢有两种办法可以进行弥补, 一种呢,把他这个软件包从他的机器人那里想办法弄出来,然后装到这里。还有一种办法呢,就把它给删除掉。 好前提是不啊,不影,你的删除,要不影响项目呃需求,如果你删除之后无法通信,那肯定不要删除,我们再编译一次, 这时候就没有错误了,清除所有错误,错误看我们再编一次, 出现了警告,警告的没关系的。 好,这时候你可以下载进去就可以了,那么这个你在那条 ip 他的配置。
 16:14查看AI文稿AI文稿
16:14查看AI文稿AI文稿大家好,之前有朋友问被服的嵌入式控制器,那么从他给我发的照片上呢看,应该是一个风电的系统。在今天呢,我们来聊一聊被服的嵌入式控制器。那被服的嵌入式控制器呢?他是从二零零二年开始的,当然了,在二零零二年之前呢,我相信他也做了非常多的工作, 在两千年左右,有一个产品叫做 pda, 那这个东西呢,可能很多年轻人是没有印象,那么像我这样的老年人呢,对他还是有印象的。大家知道一个著名的公司叫多普达,也就是后来的 htc, 那么多普达呢,通过 pda 呢,在占领了很大的一个智能手机市场。 那么在那个时候,智能手机用的操作系统是 window c e, 那 window c e 是微软未来进入嵌入式的市场呢,做了一个尝试,那到今年目前为止,好像 window c e 已经 进入了停止期。那么贝弗呢,在这二十年内,用 window ce 呢,做了很多的嵌入式系统,嗯,然后在 window ce 之后,贝弗转向了 b s d。 那今天我们给大家展示的是,嗯,在被服的所有嵌入式系统中,我们选了一些典型的代表, 在这个网页上,大家可以看得到呢,贝福有非常多的嵌入式系统,那在 他的型号命名上呢?我们可以看得到,首先是 c x, 一开头的 c x 一幺零幺零,是贝弗最早发布的一款青红色 p c, 大概是在二零零二年,他的处理器是奔腾级别的 m m x 级别的一个处理器,然后过了几年发布了 c x 幺零二零,它是一个基于赛阳的处理器。那么再高端的呢,还有是 c x 幺零三零,那么在这之后呢,过了很多年,贝弗又开发了啊, c x 两千系列, 当然了,这里我们还要纠正一点哈,在 c x 幺零幺零这个时代哈,背负还发布了一款产品呢,叫做 c x 九千,那 c x 九千呢?可以说是一个非常 有趣的商业故事哈,因为 cx 九千用的是英特尔的按摩处理器,那么我们知道哈,英特尔是在二零零二年卖掉了他的按摩部门。 嗯,可以说英特是完美的错过了整个移动时代,那在 c x 九千之后,被服务也就抛弃了,英特的 arm 处理器,因为没得用了嘛。那 再后来呢,贝弗推出了基于 arm 的 c x 八千, c x 九千, c x 七千这些产品呢,都是基于 arm 处理器的,那英特还出了什么处理器呢?英特出了它的低功耗的 autom 处理器。所以在 贝福的嵌入式 pc 上呢,我们会看到贝福的 c x 五千这个系列,它是基于 autom 处理器。 那在我面前摆的这些处理器我就找全了,再从一到九所有的系列,嗯,这一个是 c x 幺零二零, 这一个是 c x 二零二零,这一个是 c x 五幺四零,这个是 c x 七千,这个是 c x 八千,这一个是 c x 九千。那这个呢,是 c x 二零二零的一个 配件,或者说是他的电源模块。待会呢,我们给大家讲一下,为什么有的控制器有电源模块,有的控制器没有呢? 那么我们先来聊一聊 cx 一千这个系列,那 cx 一千呢?我们已经找不到了。嗯,在这个张图片上呢,大家可以看得到,这是比尔盖茨和嗯,贝弗的汉斯的一个合影, 那么汉斯手里拿的呢,就是一个 cx 一千控制器。那两家公司呢,确实是合作非常紧密,毕竟在一九九六年的时候,贝弗就推出了指纹的是操作系统的团 cat 软件。嗯, 那么在两千元左右呢,被服就引入了 windows e, 将它应用在嵌入式 p c 上,那嵌入式 p c 和被服之前的 p c 就相比有什么区别呢?那 首先肯定是小嘛,他长得就像一个 poc, 长得像 popoc 的话呢,就更加容易让工业这个行业呢来接受。同时他取消了硬盘,用 cf 卡呢作为存储戒指,那取消了硬盘,取消了风扇,在这个情况下呢,能够带来更高的稳定性的提高。 那接着我们一个一个来讲一下这些产品,这是贝福的 c x 幺零二零,那么我们用它来来聊一聊,在一 c x 一千的那个时代,那么在这个时代呢, 它的电源和 cpu 模块呢是分开的,那么我们可以看得到,如果你熟悉贝弗的产品呢,这个电源模块,在 c x b x 的系列上也可以看到这个设计。那这里 有一个按钮呢,可以四个方向按,这里有一个液晶屏,那可以用来显示一些信息,比如说时间,比如说你的 ip 地址,在上面呢有几个指示灯。 然后这个是 cpu 的主模块,那在这里有个非常大的障碍片,因为它毕竟是用了一个赛阳的处理器。那这里可以看得到呢,是一个 cf 卡的插槽, 这张卡呢还在里面。嗯,这个控制器呢是已经坏了,具体坏的是什么原因呢,我们也不得而知了,毕竟这是一个非常老的控制器,他的出厂日期是二零一三年。 那在这边呢,有个盖板,这个盖板呢,在拆掉之后呢,是可以往上加模块的,当然这个模块只能在被服务出场了之后加,出场之后呢,他就不能加了,因为他的 它接插件设计呢,是使用排线,那作为它的本体呢,它留了两个网孔, 我们可以把网线接在上面呢,通过 concate 进行扫描,那来获得它的 ip 地址之类的进行调试。那在它的左侧呢,我们最常加的一个是什么产品呢?最常加的是一个 diy 输出,再加两个 usb, 它是在同一个模块上。 那么有了迪拜输出呢,我们就可以接一个显示器,那么在显示器上呢,我们可以用来呃规划他的 ip 地址啊,或者说做一些你的分辨率设置啊之类的。嗯, 在这张小标签上我们可以看得到它是用的操作系统呢,是 windows c 六点零。在我的印象里呢,最早用的操作系统是 windows c 五点零,那慢慢慢慢的到了六点零,再后来呢,到了七点零,那 七点零的时候,他改了个名字叫做 windows compact。 那第二个介绍呢,是一个 c x 二零二零,那在 c x 二零二零上可以看到它默认呢,已经把 diy 输出再加 usb 输入哈,已经放在了它的本体上了。嗯, 那同时呢,它的设计呢,使用了更多的金属,所以在 c x 二零二零上呢,我相信它的 c p u 呢,肯定是比 c x 幺零二零更快了,因为随着技术的进步啊,英特尔的处理器也是越来越快的,但是呢,它没有看得到它的刹车片。嗯 嗯,是因为他在设计上呢进行了改进,那在设计方面呢,他也更加时尚,在某 某一年这个产品呢获得了红点奖,大家可以看得到它延续了这个四个方向键,嗯,那还有一个确认键,那延续了这个液晶屏,那这个液晶屏的内容呢?在 twink 里面呢是可以进行更改的。 那这个地方呢有一个小插片,这个插片取下来,然后下面这个插片取下来之后呢,我们就可以把它拆开啊,因为时间关系我们今天就不演示了。 在这个地方呢也有两个盖板,这两个盖板拆了之后呢,我们是可以往上呢再加他的扩展模块的,比如说你要加一个更多的硬盘啊,我们就可以在这边呢添加。那大家对他能扩展哪些产品呢?可以感兴趣的话呢, 可以去贝福的官网上看。 那刚才说了电源它是可以拆的时候呢,在这里我们展示一个更大的电源, 这个电源呢我们从这个散热格栅里面往里看呢,它里面呢是有很大的电容还是电池,这个我一下子看不太出来,那么这个肯定是意味着它作为一个 ups, 那在这里呢,我们要讲一个概念,叫做 number one, 嗯,也就是说一个钓电保持的存储在 c x 一千跟 c x 两千这两个系列上,它的钓电保持存储呢是跟电源模块设计在一起的, 所以在大家选型的时候呢要进行注意。那么这两个产品呢,它是不带 ups 的,那在后面的产品中呢被服务设计了 ups, 那么我们在这里讲 强加 c x 五千,刚才讲到了我们 c x 五千呢,它是使用 autom 的处理器, 嗯,最早出来的型号叫 c x 五零幺零。嗯,那目前已经进化到了五幺四零。 在侧面呢,我们也可以看得到,它是默认带了 d y 口,那么在 d y 口的左边,其实往往往往你们大家可以选择加一个其他的接口,比如说 puffy net, 或者说是 either cat, 或者说是 can open, 或者是 device net, 都可以加在这个位置, 然后在他的左边,我们没有发现像 c x 两千那样的两个插槽,意味着呢,他在这边呢是不能再进行扩展了。这里有一个 windows 的标签,这是一个很大的标签,因为他使用的操作系统呢,是一个 windows 十 l t 的版本啊。 那再打开这个盖板的话,可以看得到它里面有两个插槽,第一个插槽是 cf 卡,第二个插槽是 tf 卡, 这上面是电池,那电池的作用是保持他的时间,因为我们这个产品呢,是一个全新的,所以在电池这里呢,他还有一个塑料纸垫着来。呃,进行绝缘吧,那我们试一下,可以拔出来啊,拔不动啊,算了, 在这边可以直接扩展 i o。 嗯,那在这里我们提一句哈,嗯,因为这个 c x 五幺四零呢,它是一个 x 八六的结构哈,那么在 x 八六的结构上呢,这两个网孔呢,大家是可以想办法呢,把它做成 either cat。 它的配置啊,那么如果是 am 的处理器呢,我们就必须要呢,要从它的右边呢来扩展 either cat。 嗯,这个呢,我们待会儿再讲。 嗯,现在我们手里拿的呢是 c x 七千。嗯,那 c x 七千呢? 它是一个非常小的控制器哈,它的有什么特点呢?这样一个本体,它已经自带了 i o, 那么刚才我们介绍的这些控制器,或者说我们等一下要介绍的 c x 八千,还有 c x 九千,它的本体呢,都不带 i o 哈, 所以在这个期间呢,我们可以这样认为,它是为了针对西门子 s c 幺二零零啊,或者说是针对一些一体化的控制器市场推出的一个折中性的产品。 那编程还是通过网口,这里有个盖板,那么盖板下面呢是一个 tf 卡, 那它是一个非常优秀的,非常经济的小型 p o c, 毕竟它里面呢是一个 arm 处理器,那么可以跑非常快的 p o c, 同时它对 i o 的点数没有要求,比如说我们去用一个三菱或者是西门子的小型 p o c, 那么它的 i o 点数呢?是有限制的,但是在 c x 七千这个范围上呢,它的 i o 点数呢?并没有任何限制啊。 好,这个是 c x 八千,我手里拿的是一个八零九零,在这里我们可以看得到它底下有两个网口,那因为它是八零九零九这个字母呢,在背符的控制器里,往往意味着以太网,比如说 b x 九千, b c 九千啊,所以如果呢,我们拿了一个八零五零,八零三零,这里呢总线呢?他会有万啊, 拆开还是一样,里面呢有 tf 卡还有电池啊,那这上面有三个灯,嗯,第一个是吞开的的状态灯,第二个是看门狗,第三个呢是报错。那 six 八零九零呢,也是一个非常优秀的小型控制器,目前它在市场上的报表量还是非常大的。 最后呢,我们来介绍一下 c x 的九零二零,嗯,它的左侧跟 c x 五千,跟 c x 两千一样,都保持了一个 d y 输出,四个 usb, 还有两个网口。那在这里我们要注意的是哈,因为它是一个 windows c e 的 结构,再加一个 arm 的处理器哈,所以呢,在这两个网口上呢,我们是没法把它配成是一直开头,当然了,这里面是个交换机,我们可以看得到,我们可以呢,有很多的控制器连在一起的话呢,我们可以通过这两个网口一进一出,不停的把控制器呢,往下去做一个串联, 我们还可以看得到呢,它的设计是非常有趣的,它用了两个硬盘口, 所以说在这个系统上呢,我们可以插两个 tf 卡,另外一个 tf 卡呢,来做一个数据备份呢,或者说是大容量存储。 嗯,在这个设计上呢,它就没有盖板啊, tip 卡呢,可以直接取出来。那 six 八零九零跟 six 九零二零一个很大的 区别在哪里呢? c x 九零二零呢,它内置的 no ram, 但是呢, c x 九零二里面没有内置 ups, 那我们刚才说的 c x 八零九零, c x 五千啊,它呢都内置的 ups, 那这些控制器呢,它没有 number on 啊,但是它提供了两秒的 ups 啊,可以呢,让你在断电的瞬间把你的数据写到 cf 卡或者 cf 卡上去啊,这是他们的一个差距。那 在选择的时候,大家会选择嵌入式 pc 还是选择工控机呢?我更认为这还是一个见仁见智的事情,比如说我们希望一个很大的存储,我们需要一个硬盘啊,我们要做一个数据库,或者说我们要跑一个非常快的界面啊,那这个时候呢,我们希望有一个足够大的处处理 气,希望有一个足够大的硬盘啊,肯定会选择一个控控机啊, 那如果我们只是希望它来替代传统的 p o c 啊,或者是认为是 p o c 的升级版,那用一个嵌入式控制器呢,会是一个比较好的选择。 在我们面前,从 c x 九零二零开始呢,它就可以做运动控制,那这个 c x 九零二零呢,可以做一个多轴的运动控制,那么到了 c x 五千的时候呢,它就可以做 n c i 哈,也是意味着它可以做一些插补,比如说一些涂胶啊, 一些还有些切割啊之类的,这些都可以做。那么到了 c x 幺零二零,还有 c x 二零二零这些层次上呢,其实它的处理器已经足以支撑一个标准的 c n c 了,那大家可以考虑一下,如果你要做一个项目 的话,你会怎么来选择这个嵌入式控制器啊?所以我们今天的视频呢,就用食物还有我们的一些, 或者说我这十多年来的积累,给大家来介绍一下背负了整个 cx 控制器的一个产品体系啊。那如果大家有什么问题呢,可以在视频下面回复或者私信我都可以啊,好,谢谢大家。
107NewMaking 23:58
23:58


