三坐标理论值和标准值实际值
看这个报告怎么看啊?这报告上面都有写的很清清楚楚啊。第一个这个是标准值啊,这个是标准值,这个是上公差,这个是下公差,这个是实测值啊,这个是偏差值,这是超差值啊。咱们的这个标准值嘞 是一百六,但是他的公差是偏下线的,公差是负二到负四,那么他的最大值就是一百五十九点九八,他的下线的话是一百五十九点九六,再测现在测出来是一百五十九点九四,超出他的公差一条七 啊,这个负了五点零点零五七是实测值,这个标准一百五十九点九四三和一百六十的这个中间的一个差值是负 的五条七,咱们主要看最后一栏,看最后一栏这一块的啊,这个超差值看第一个就是超了超出一条七,下面的这些都是合格的。那这边呢?有时候有人想问啊,这个黄色的是什么意思?是黄色是偏小,就是超出他的下线之后 就会显示是黄色的,如果说这个地方是超出他的上写,那么这里的颜色就是红色,那这边的紫色呢?是在就是说这个测量数据 啊,靠近极限状态,他的是上限是一九,就是六十二点一九,现在测出来是六十二点一五,这个绿色的啊,就是合格的这种这种深颜色的绿色,就现在这个数据跟公差离的还差的很远,就数据特别好啊,这个就是红色的,这是你看他, 他的工差是正十五条,就是六点一五,然后我们实测值是正的六点一五五,超出工差五条就偏上线,所以这边显示是红色的。

粉丝1.9万获赞9.2万
相关视频
 02:50查看AI文稿AI文稿
02:50查看AI文稿AI文稿大家好,今天给大家介绍一下我们这个城市编辑窗口里面的一个理论值和实际值的一个区别。我们可以看到我们现在一个坐标已经建设完成了,然后我们可以通过这个时量点的时量在模型上方可以踩一个点,那这个时候我们创建出来, 创建出来的这个点,我们可以去看一下他的一个理论值和实际值,那我会发现他所有的值都是一样的。那么现在跟大家解释一下他是什么意思? 理论值其实就是我们的一个图纸上的一个标准值,也是模型上面的一个参数,他相对于他只是相对于模型本身,或者说是相对于图纸本身的一个坐标值, 而这个坐标值是相对于我们的一个坐标出来的啊,我们目前坐标建在这里啊,底下这个实际值,因为我们这个产品只是在模型上面编程,还并 没有上工具上面测量,如果说测量以后啊,这边会表达的一个坐标值是相对于我们产品本身的一个情况,所以说理论值和参和实际值的区别就在于一个你的理论值相对于模型本身 实际值是相对于产品本身的一个区别啊,这个点已经出来了,我们在我们可以看一下我的模型这个点在这个位置,我们的右下角,右下角这个地方我们可以去程序已经编完了,我们可以到我们的产品上 可以去验证一下,然后我们等一下就是可以把探针自动运行到这个点,然后再去看一下我们的一个结果事项,做做一下对比大家就清楚了。好,现在我们的用程序运行 起来,让我们去实际的在模型本产品本身上去采取一下这一个点, ok, 我们这个点已经点九,已经采集完成了哈,这个时候我们可以看一下,我们的一个理论值和实际值就已经不一样了, 目标者和理论值是一样,都是基于模型本身出发的,我们要看的就是这个实际值,你看一个是二百零八点七七八,一个是二百零八点七八二,这个就是我们实际值,就是我们刚刚从产品本身上所踩到的一个点的位置,他的 x、 y、 z 都会有变化。一个是十点零六四,那另外的就是十点零六五,理论值就是十点零六五,理论值是负二十二,我们理论值测出来是二十二点零八二,也就是说我们其实是这个面的高度和我们 表面这个大面的高度是二十二点零八二,但是我们从模型上拉出来的尺寸是属于二十二,他是一个标准值,从模型本出,从模模型本身出发的。 而我们这个实际值就是从我们弓箭实际测量的点出发的一个数值,这就是理论和实际的一个区别。
 12:55查看AI文稿AI文稿
12:55查看AI文稿AI文稿呃,大家好,欢迎来到袁老师课堂,昨天一个学生问起我这个事情,就是想我录一段呃,车头这个较艳的一个一段视频啊,那今天我就来录一段这个视频, 在车头加盐之前,我们先要热认识一下这个车的部分啊。首先 这一块,呃,这块是侧坐,当然我这个侧坐这块的型号是叫做 p h 幺零 t, 那这个是自带旋转的功能的,有一个 a 角,这上面有个 a 啊,有个 a, 我们可以 镜头拉近一点看一下啊,这边有个 a 角,然后这边上面这个旋转的这个角度,这个 角度这边有个 b 角,那 b 角的话是在后面可以看到啊,后面可以看到啊,我们可以看到这边有个 b bb 加,看到吗?好,那么这个是自动的一个侧坐,那自动侧坐的话,呃,那下面还有 这边有一个叫侧座的连接,那侧座连接这里有个型号啊,我们情况我们把它掰下来看一下,我们把它拧下来看一下。啊,啊,我们可以看到这是雷尼少的侧座连接,他的型号是 tp 二零啊,这个叫做厕所连接,当我这个厕所连接,呃,拧下之后啊,我们看一下 灯就灭了,拧上去灯又亮了。啊,好,那么接下来我们再看一下啊,这个侧座连接型号已经有了啊,这边下面一段,这一段是加长杆,那这一长加长杆长度是四十, 那这个前面就是侧增了,侧增的话这是四毫米的,呃,球直径加上长度是二十, 那么我们先把这个了解清楚了之后,我们后面再进行一个教验。好,接下来我们要在这个 pcds 的这个软件里面,我们把这个侧头文件给呃加载一下,那么这边有一个编码原则, 刚刚我是说是四毫米的球直径加上一个总长度是六十,那我们这边的编码原则是呃四,这边四的话是表示球直径,然后中间一拿臂外隔开,然后这边后面是 加长杆加上针的长度,总长是六十,那么总总个测的文件就是四 b y 六零 啊,当然你可以用别的编码方式,呃,主要是编码方式的话,主要是体现出一个呃侧增球的一个大小和总长。 好,那么这个侧头文件这个名字给起好了之后呢?然后我们这边有一个侧头,说明开始要定义这个呃上面的 连接的各项的内容啊。首先我们看一下啊,第一个我们是说的是有一个侧坐,侧坐的话我们型号是 p h 幺零 t, 刚刚给大家看了啊,那么我们就找到 prob, 然后这边 p h 幺零 t。 好,然后他顺带的把两个转角给出来了,有个 bm 角, a m 角分别代表 b 的转角和 a 的转角。好,接下来我们看一下下面一个连接的啊,下面一个连接的那个转接头的话是 我们叫 prob, 也是 prob 开头的 prob 的 tp 二零,对吧?啊,我们选一下啊,这边模拟也出来了啊, tp 二零。接下来的话我们再看一下下面是有一个加长杆, 加长杆的话是我们选择的话是 x 乘,我们有一个先前在加长杆是四十毫米,那么我们就选一个 x 乘四十。 好,最后是侧针,侧针的话,呃,侧针的话是踢不开头的啊,呃,我们选择踢破四,因为我们是四毫米的头嘛,啊?踢破四,鼻歪二零, 好,题目是标二零,那么这个当全部选择完了之后,边上的这个预览状态也出来了, 然后上面立马跳出来了一个叫 t 一 a 零 b 零,是不是啊?那么这个就代表了 a 零 b 零的状态,就是争数值的状态,数值状态好,接下来的话,呃, 我们看到这个 t 一 a 零 b 零的话,这边前面有一个星号,那星号代表这个是没有进行教验过 啊,这个针就没有进行教研过,那我们需要对他进行一个教验啊,那么在教验之前,我们可能 现在只有 a 零 b 零的状况,那么我们可能还添加一些角度,那么我们角度在哪里添加呢?在这个地方添加啊,这个地方添加选一下, 假如说我整个过程当中,我不光说是要 a 零 b 零的状况吧,我可能还有别的状况,比如说 a 九零 b 零,比如说加一个啊, a 九零, b 零。好,加 a 九零、 b 零。之后,然后我们选择一个添加,添加之后新角度就到 这个对话框里面了啊,然后比如说我这里还要再添加个 a 九零 b 九零,当然这些角度的话,是根据弓箭本身需要采取添加的。啊,啊,添加啊,这边有出来了,那么我在这个边上有一个啊, 边有个表格里面也会出现了这个情况啊,然后我们看一下对应的横作标,重作标,分别是这边有一个 a 九零、 b 零和 a 九零 b 九零。 好,那么这个灰色的东西,灰色的区域表示已经添加的,那么这个是表示红色的区域,表示新添加的,那么我会发现这个角度每个角度每格是七点五度,那代表这边角度啊,都是七点五度的倍数, 并不是说任意任意角度他都可以旋转到啊,他是有一定的。呃,每个有一个最小刻度啊,最小刻度是七点五度啊,那这边添加完了之后,那么我们按一下确定, 确定之后,同样我们这边上面跳,跳出来了啊,这边跳出来了之后也是前面打了一个信号吧啊,这三个都有信号,那代表这个都没有进行教验过, 那么我们需要把它叫厌,叫厌的话我们选择它,我们可以按一个 ctrl 键,按 ctrl 键,然后先选它,就代表第一个,第二个,第三个。 好,我们可以这边预览,看到没有啊?分别代表了这个是这个,这个预览的效果是 a 九零和 b 九零的状况啊,那么这个上面选择好了。 好,这个选择好之后,我们按一下测量啊,按一下测量之后,然后这边同样跳出了一个对话框,跳出了对话框之后啊,我把它拉过来看一下啊,跳出了对话框, 然后,呃,这边的话有个测点数是五,那么你这边可以改,但是最少是五啊,这系统默认是我就不改了啊,这边毕竟回的距离我也不改移动速度,就是我都不改。那这边有一个, 呃,工具球球体啊,这上面是写的是十五点零八十二,那待会我可以看一下这个球的这个情况啊,那这个工具球的话,你可以自己添加自己编辑啊,那系统默认的我都不改,这边都是默认的。这自动模式啊,默认模式这边 都不去改他了啊,然后按下测量,这边我们选择这个手动踩点的定位工具,因为 我们的测量工具的话是随机放在这个台面上的啊,然后这边按下确定,然后他有一个警告,旋转的有一个警告,那么他是提示你 出现可能转头的一个情况,可能会碰到弓箭,那么我们这边没什么状况的话,我们按一下确定啊,这边开始要进行一个手动操作的过程了啊。 好,我们来看一下这个胶原球体啊,刚刚那个十五点零八四二是什么呢?就是这个球的一个呃,直径,那么这个球球是拿陶瓷做的啊?这个肯定是,呃,你看到十五点零八四二,小数点后面四位吧, 然后我们三周标的精度是,呃,六的级别,是小数点后面三位,那我们肯定拿高精度的去教验,去作为标准去教验低精度的啊。 好,那这个怎么交易呢?我们把这个球体的话放在这个呃,上头标的台面上啊,然后我们控制这个手机器 啊,去打从那个垂直方向啊,因为我们第一个是 a 零 b 零的角度吗?垂直方向去触碰这个球体, 好,然后触碰了之后,然后我们这个手持器啊,手持器上我们这边打一个勾就行了啊,他就会自动去交烟了。 那有的有的同学会问,你不是说是测量五个点吗?怎么差打了那么多个点啊?我跟你说一下, 呃,自动测量他是五个点,那前面他打了一共是打了四个点,他四个点的话就是我所谓的四个点,是 他自己打了三个点,还我打了一个点,那么前前面四个点是确立一个球体的一个中心在什么位置,然后他再去打后面的五个点,大家可以看到他又转了一个角度,转了一个角 度,他然后再去打这个五个点,那这个角度是 a 九零 b 零的一个状况啊,嗯,看到了吧?是五个点吧啊,他又立马抬了出来,然后又换了一个角度,那么这个角度是刚刚最后一个,我添加的是叫 a 九零,然后 b 九零的一个角度, 因为他已经知道了球的中心的一个位置, 然后他就直接打五个点了啊,他首先在就是在近方向他打了一个四个点,然后在他的一个顶部再打一个点, 那么这样的话,呃,整个一个球的一个就是一个针的一个教研过程已经结束了,那结束了我们再回到这个这块啊,再回到这个界面上面,主界面上面,那么这个界面上面我们看一下, 看一下啊,那么这边前面的信号已经没有了,信号已经没有了,然后的话我们看一下结果,我们看结果的话,测量结果的话都在一个咪啊,那么只要他没有系统,没有报警的话,那说明这个教研已经成功了啊,那我们确定, 然后我们再确定,那这样的话这个三个刚刚三个角,三个角度,这个三个角度我们都可以用了啊,我们可以随时选择这个角度啊,随时选择角度选择,比如说角选择 a 零 b 零,那么 那这个时候他会赚到一个 a 零 b 零的一个状况啊,赚到需要用的 a 零的一个状况。好,那么今天的这个教验,这个真的一个过程就结束了啊,谢谢大家。
1328袁老师常州数控培训 02:41查看AI文稿AI文稿
02:41查看AI文稿AI文稿哈喽,各位朋友大家好,最近老是有人私信问我坐标系怎么建立哦,今天给大家准备讲解一下啊,然后选择这样一个临时的纸盒画了一下,那么就是这个 x y 三个 x y 的三个轴怎么去给它摆正到这个弓箭上面,大概是这样一个意思,等一下我们实际操作一下, 基础理论的话呢,是上面这个面时间元素一定要垂直于 z 轴,那么这边呢是 x, 这边是 y, 那么一定要进行一个摆正 啊,我现在拿了一个弓线摆放在我们三周标仪器上面,我把三 d 数模打开了,但是会发现这个方向和这个方向呢是有偏差的, 那么接下来第一步呢,就是要把模型坐标系和我们实物摆放的位置呢是摆正到一个方向。好,现在大家看一下啊,这个实物摆 摆放的 xyz 方向和模型三里数模模型的方向是一样的,包括我手持的这个三根筷子的这个方向啊,大概是这样一个意思。 好,接下来一步呢,我们在打好三个元素平面圆和直线之后呢,空间位置找正里面,把三个元素放进去。接下来第一步就是让我们这个面不能随便的任意的摆动,就是让它垂直于垂直于 z 轴,这样子啊,那么所以说我们选择这个 平面衣打上勾,让它正 z 方向空间旋转。那第二步呢,就是我们这个直线啊,这条直线呢在这里,这个直线呢是在 x 方向,所以我们要围绕 z 轴啊,围绕 z 轴, 围绕 z 轴把它旋转到正 x 的方向,这样保证它这个平面旋转,它这个上这个不能动,之后 这个保证这样平的旋转也不能旋转,这个时候呢再把这个三个轴的圆点回到我们这个刚刚打的这个圆的圆心,那么选择这个圆啊,把它偏直到这里,自动偏直到这里,那么这个坐标系呢就建立完成了 啊。最后总结一下啊,我们拿一个长方体的盒子来做总结,这个上面的这个顶面,你在摆好之后,它其实是不可能完全平行于啊 x y 面,或者说垂直于 z 轴的,所以说你要让它垂直于 z 轴,垂直于 z 轴 啊,去做这样一个第一个参数,然后在前面拉一条线啊,他是在正 x 方向,这是第二个,那么让他不能够进行这样一个偏移旋转偏移啊,最后把我们三个轴的这个圆心啊偏置到我们,比如说顶面正好有个圆 元素啊,把它放到这个元素圆圆心也可以,当然最后你可以把它偏执到任何位置,这个轴心点都可以的啊,那这个呢就是建立坐标系的这样一个基础的理论。
 02:19查看AI文稿AI文稿
02:19查看AI文稿AI文稿今天给大家讲一下愚权误差和最佳拟合重新补偿三坐标。在进行测量时,记录的最准确的值都是测头 红宝石求新的坐标值,其他的值都是通过补偿一个半径得到的坐标值。我们以二维平面为例, 红色为红宝石侧头,白色为一个倾斜的平面,侧头自右向左水平测量平面上的目标点一, 由于直线是倾斜的,我们的测球测不到目标点一,导致测量补偿后补偿到目标点二,此时就产生了余弦误差。我们得出一个结论,所有手工测量的点坐标都不是真实的值。那为 什么我测的圆锥柱球体没有问题呢?这你得感谢三坐标的一个功能,最佳拟合重新补偿。比如上图一个内孔,我们测量了四个点三坐标,先把四个位置处的红宝石球心 最佳,你合成一个圆,然后统一向外补偿一个红宝石的半径,得到我们所测量的圆。 我们再以测量平面为例,当坐标先把测量平面上的四个点的红宝石球心拟合成一个平面, 然后统一向平面补偿一个半径,得到平面。测量两个点以上的特征都是先拟合再补偿,所以 我们量出来的尺寸才正确。手工测量单点的值是不正确的,不能作为参算对象。那如何才能测量一个点的坐标值呢? 必须沿着点的法向方向自动测量,才能消除鱼旋误差。最后总结,只要理解了三坐标侧单点的原理,其他的自动特征、自动圆、自动注、自动追等, 仅仅是一个计算器计算出来探真的补偿方向、行走路径等。
109面对疾风吧 05:00
05:00 01:45查看AI文稿AI文稿
01:45查看AI文稿AI文稿今天我们大概讲一下 t 值的应用。首先我们大建一个坐标系,先选取元素,我们这边就简单的建一个坐标系,我们就不考虑这些点取值的一个合理性啊。 然后再选择红色的, 大概的建一个坐标系啊。然后我们这边金件就不再去处理了,我们去讲一下。比如说我们这边去测量一些面上的点, 在评价的时候,有很多地方有一些要用到评价 t 值的评价,在位置这个工具栏里点击选择我们要评价的点,自动取消。然后这里面会有一个叫做活力键选项,计时给电工差。 报告是单位毫米,两者创建啊。这边评价完成,我们来看一下报告啊,讲下气质的意思, 替职。然后我们把报告然后来隐藏掉。一般替职的时候我们这些东西是不要的啊,只留一个测定值或者偏差就可以了 啊。这就是大概的一个 t 值,一个图标。 t 值的意思可以理解为它一个适量方向性的偏差。如果像这种平面的,你好理解,就是单方向 z 方向,如果是斜面的,那就是 x, y, z 三个方向的综合性的偏差。
108昆山途准三坐标检测 06:47查看AI文稿AI文稿
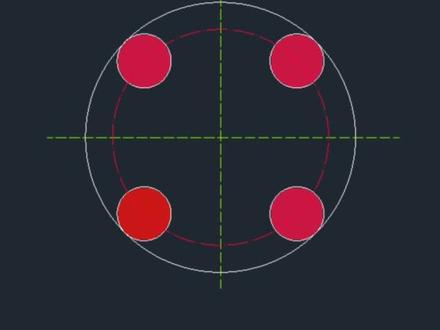
06:47查看AI文稿AI文稿嗯,欢迎大家来到袁老师课堂,今天讲一下三座标的这个圆形正列这块啊,我们先看一下这个零件, 那么这个零件我已经把坐标已经建好了啊,我把坐标建在这个圆心的上方,那么我当时是先打了一个平面,然后再打那个圆,再打了一条直线,把这个坐标建立在 这个圆的圆心的上方,然后的话我们可以看到这边的话有呃,这边五个孔,这边五个孔, 那么这个的话,他是像这个的每个小孔之间,像这个单边的每个小孔之间的角度是三十度,那么 我们怎么去用正面来把这些孔进行测量呢?啊,那么我已知的啊,已知我这边图纸就不给大家看了啊,这个图纸已知的是 啊,这个一圈十个孔的中心的连锁连的一个圆的直径是四十四,然后的话这个圆孔的直径是七 啊,那么我用自动自动源啊,我已经建立了一个原音啊,建立个原音我给大家看一下啊。 呃,刚刚说的那个中心的这近十四 是,那么这个原因的话啊,这个原因的话,他的呃中心那么就是 x, 就是二十二,玩就是零,那么谁也是零,对不对 啊?由于这个孔很浅,那么我给定的呃深度只有零点二,因为我那个针头是二毫米的啊, 好,那么这个的话,我把它命名为七杠一啊,由于这个一共有十个孔,那么就是七杠一到七杠十啊,啊, 那么接下来啊,接下来我这边这个还是回过去啊,好,我现在的话已经有了这一个孔,那么怎么利用正列把另外的九个给正列出来啊?首先我们看一下啊,这边有一个 啊,编辑,编辑里面有一个正列啊,正列的话,呃,今天讲的圆形正列啊,那么圆形正列就只使用到这个角度这块啊,那角度这块的话,呃,我先前移至的角度是三十度 啊,那么这边有个编制次数,那么编制次数的话啊,就是如果说你有这个是第一个, 这个是第一个,你要画第二个的话,那么偏字字数就是偏字一而不是二啊,虽然说出现了两个圆,包括以前的圆是两个圆,那偏字字数是 二一,那么这边如果说我是要嗯,十二个,对吧?哦,一共是十个,那十个的话,嗯,我们再回过头来,我们看一下这个, 由于这个地方跟上面的这两个地方是缺项的,如果说补上的话就是十二个,是不是?好,我先把这个正列出来啊,那么编制次数的话就是十一个,好,那么我们确定一下,好,我们 复制好,我们选中这个七杠一和上面的移动安全平面啊,记住这个移动安全平面一定要选啊,那么呃,右键然后复制啊,复制了之后,然后在上面编辑再进行一个正列粘贴, 那么这里粘贴之后啊,我们可以看到啊,这边出现了一共是十二个圆,那十二个圆的话,其中七杠四和七杠十是多余的, 那么我们就把这个七杠四和七杠十,我们把它删了,呃,删除啊,那么这边有人说一个爱心评评区不要删啊,随便你删不删啊,这无所谓啊, 西藏师也删了,有点删除。好,那么这个时候啊,我们看一下啊,我们就按照这个命令我们执行一下啊啊,这边已经就是把那两个删了啊,我们就从这个手动 dcc 模式开始看,好球优 咨询一下。好,我们来看一下啊,好,我把背率调高啊,好,打到第二孔,然后把它 抬起来,第二个, 第三个, 然后刚刚我这个删掉了第四个,对不对?他就直接到了这边第五个吧。嗯, 这个过程当中呢,大家这个一定要注意, 就是打了一个孔之后立马要那个移动安全平面把它抬起来,不然的话 啊,直接移动的话会撞正。那么尤其是,呃,虽然我们前期的话在那个激活安全平面上面是开 打开了,但是对于这个正列的而言啊,对于正列而言的话,这个正列的话就一定要把一段安全平面带着一起正列, 不然的话他这一端全程平面不会进行去整理的。啊, 好,全部打完啊,全部打完的话最后一步 我刚刚忘加了一个移动安全平面啊,反正后面再加一段安全平面把它抬起来啊,那今天的这个正列这个课程就讲到这边啊。
482袁老师常州数控培训 03:23查看AI文稿AI文稿
03:23查看AI文稿AI文稿哈喽,各位朋友大家好,三坐标大 boss 每天都在用心的分享剪辑视频,有需要的一定记得关注收藏一下。今天我们讲一下三坐标里面坐标系是怎么建立的。 好,这一节我们来看一下坐标系的建立,我们通常用的比较简单的一个理解方法,那目前这个坐标系呢?是机械坐标系,就三坐标开机之后,本身他的这个坐标系,那刚刚上一节课,我们打了这些元素啊,组合元素讲解, 然后发现,哎,这个离得很远,对吧?那就不方便,你没有办法去把它摆正之后呢,后面的测量也会不是很顺手。 好,我们先进行一个啊,我们看一下,适中,哎,在这里比较远。那么在建立坐标系的时候呢,我们要有两个实验元素,为什么呢?因为三坐标是 x、 y 的三个方向, 那么食量元素呢,是有方向性的,那么有了两个食量元素的方向之后呢,第三个他就已经会对齐了,那么接下来我会把三个元,三个元素找到啊,或者说是我们把两个食量元素找到。第一个是我打的这个平面是震贼这个方向, 那么我和 x 和 y, 我需要再找一个方向,哎,那这个元素上面没有 x 和 y 的方向怎么办呢?我们就要组合一下,比如说这两个圆组合一个直线,那么这个直线呢,是有方向的。 好,我们有了两个方向,对吧?这个是直线的这个方向组合好了,这个是平面的方向,我们建立坐标系。建立坐标系呢,其实就是弓箭位置找正, 我们要把我们所需要的元素拉进来,第一个我们是这个平面啊,鼠标中间直线, 那么假设我们的三,呃, x、 y 的圆点放在这个圆二上,我们实际弓箭图纸是圆二为基准,那么其他的测量元素到它的距离、角度各方面,我们以它为基准,那么就把圆二鼠标中间拉进来, 那么平面啊,当然我们这个圆,这几个、四个圆都是投影在这个平面上的啊。呃,平面一,平面一是正 z 方向啊,它的 i j k 啊,余显指 k 十一正 z 方向,把它空间旋转, 那么直线啊,我们这条直线,直线的话,我们看一下 i j、 k 啊,正 x 啊,确实是正 x, 那么它会围绕,让它围绕 z 轴啊,旋转到正 x, 因为它是正 x 方向,那么把它平面旋转一下,那么因为这个直线也在这个平面上,因为这个直线是两个圆 圆组合的,那么这个圆是投影到这个平面上的,那么所以说我们 x、 y、 z 的圆点呢,就直接编制到这个圆的圆心就可以了,它是在一个面上面的,这样说理解啊,我们把它编制一下,好确定 我们更新测量元素,然后适中一下啊,发现,哎,我们的这个当前坐标系啊,我看一下,显示当前坐标系, 显示当前坐标系,显示模型坐标系啊,那模型坐标系和机械坐标系啊,机械坐标就是当前坐标系啊,已经重合了,那么这个时候呢,我们坐标系已经摆正了 啊,回过头来我们看一下这个实物啊,我们实物原一、原二、原三、原四,那么这是一个大平面,大平面垂直于 z 轴啊,这两个圆拉的直线是 x 方向,那么 y 方向自然也就形成了,这个时候呢,弓箭位置和机械位置呢三个方向他就摆正了,我们坐标系就可以建立完成了。
 00:25查看AI文稿AI文稿
00:25查看AI文稿AI文稿一直运用于薄币界或者说曲面界,因为他使量不是垂直的,然后 x, y, z 是无法计算完全计算出这个值的一个啊 偏差。那我们就用到这底下这个 t 值啊。薄币键选项 t 值就是 b j 十量方向偏差。我们创建这边 t 啊,正常有些软件他会这边会显示 b j 十量方向偏差。
137昆山途准三坐标检测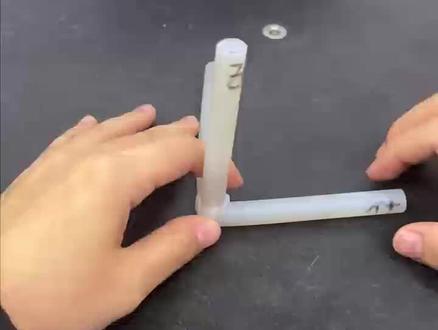 00:51查看AI文稿AI文稿
00:51查看AI文稿AI文稿我们三坐标建立坐标系的过程,实际上就是确定我们坐标系六个自由度的过程,那有很多学员就不清楚这个六个自由度是哪六个自由度,那首先 有三个旋转的自由度,分别是围绕着 x 轴的旋转,围绕着 y 轴的旋转,还有围绕着 z 轴的旋转, 另外还有三个平移的自由度,分别是沿着 x 方向的平移, 沿着 y 方向的平移,还有沿着 z 方向的平移。我们把坐标系的六个自由度控制住,也就是让坐标系不动,那我们最终就会完成建立坐标系了。
1677昆山途准三坐标检测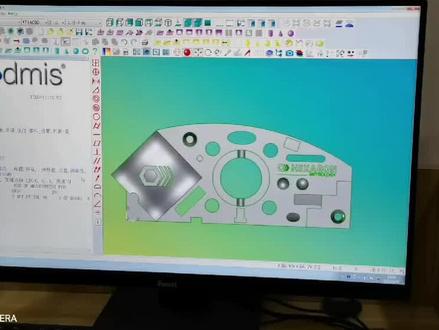 01:29查看AI文稿AI文稿
01:29查看AI文稿AI文稿今天教大家如何查看平面度具体值的偏差啊?首先我们先打一些点位,构造一个平面,然后评价一下 构造平面,把点位给他选择上, 然后创建关闭平面度,选择刚刚构造的平面关键关闭。好,那我们如何查看呢?首先再插入, 插入里面有一个报告命令,然后我们点这个分析。 好,首先我们要点这个显示所有箭头,选择一下这个平面,显示所有箭头, 然后查看窗口,显示显示点信息,把我们不需要的全都给他勾取掉,只留一个偏差, 然后这个不使用,给他勾勾掉,勾这个触色间隔,然后确定就好了,哪个点高哪个点低就一目了然。
187昆山途准三坐标检测 01:16查看AI文稿AI文稿
01:16查看AI文稿AI文稿好,有学员问啊,那如果说在评价的过程当中,我们使用非传统评价的时候,比如说 这个同心度啊,啊,我这边刚刚已经定义过一个基准了啊,那我选择这个元二,那么我这边后面可以选择基准来进行一个 呃,同心度的一个评价啊,那么在传统评价当中,怎么去把这个基准给选定啊? 好,首先我们把它改成到传统评价,我们在这个插入,然后尺寸这边定义为使用传统评价方式啊,那么这个时候我们再选择这个同心度。好, 那么我们这边如果说光选原二的话是不行的啊,我们再选一个原一啊,那么就是先选特征再选基准啊,这个时候我们再进行一个评价。 好,那么好,我们可以创建出来了啊,这个同心度前面是一个特征,后面是基准。好。
104袁老师常州数控培训 02:06查看AI文稿AI文稿
02:06查看AI文稿AI文稿大家好,我是三坐标老孙,有老板咨询我一个问题,要买什么样的三坐标,买什么配置的?下面用两个产品来举例啊。 首先,我手中拿的是一个铜电极,如果这种电极呢,主要是测他梯子比较多一点啊。你买小型程的,半自动,全自动都可以。主要是 基于几方面的考虑。第一呢,你的客户是用什么样的三坐标,最好是品牌形成和配置最好,型号都是跟他一模一样的, 他的屏保不会质疑你这是电极。买全自动半自动都可以。他主要是测曲面,呃,位置度还有垂直度各方面的。他主要测体脂。还有接下来我手中拿的是这个机加工的一个产品,你不要看这个 东西很小,但是它的结构挺复杂的,它需要测量的元素还挺多的。最主要的它是里边的这个很深的一个锥形的孔。 这种产品呢,如果一步到位的话啊,买带扫描的,呃,小型程的就可以。但是为什么要带扫描呢?第一个他带扫描模组的,好比说如果是林少的话,可以买杠三的,如果是海仓的话,可以买叉三的啊,如果是蔡司的,可以买叉 t 的车头 啊,他延长感啊,接的比较长,可以保证精度,他可以做一个连续扫描,这样测出来的精度比较好。 如果是基于产品啊,那第一个考虑的因素就是客户用什么样三种药,你就用什么样的三种药。如果客户用的太高端,那我们吹而求。其次啊,买同样品牌, 价格实惠,性价比高一点的。如果你手里的资金比较充足,呃,你可以买新的。如果资金紧张的情况下,你想省一点资金,考虑我们的二十三坐标。二十三坐标的精度 和服务跟新机是一样的。如果有老板想需要咨询,我们可以给你提供一个更合理呃更省钱的方案。
 00:58查看AI文稿AI文稿
00:58查看AI文稿AI文稿大家注意看镜头里的小白拿起了三坐标测量仪操作手柄,但是他一脸迷茫,不知从何下手,其实只要想学就能学会,接下来给大家详细介绍一下三坐标测量仪的操作步骤。三坐标测量仪的开机过程,检测机器的外观和导轨是否有障碍物, 对导轨和工作台进行清洁,检测温度、湿度、气压、配电等是否符合要求。然后按照顺序打开气源控制柜,电源计算机电源系统自检完毕后,启动软件进行回零点过程。 弓箭测量过程,进行测量操作,在进行弓箭测量前,将弓箭恒温处理和清洁,根据编程时的家具设置进行零件装加,保证弓箭的稳固。打开测量程序,使用软件提示位置踩点,然后程序会自动测量完成, 还需要查看和保存报告,以便后续分析和处理。以上就是三坐标测量仪的操作步骤,如果您想要学习,我们这里有专业的培训团队,从事精密行业十余年,欢迎您的加入。
2391昆山雄邦精密机械有限公司 01:01查看AI文稿AI文稿
01:01查看AI文稿AI文稿啊,那么首先啊,我们先找到相对应的侧针,我们现在机器用的是二毫米四十长的针,那我们就应该选择二 by 四十, 然后选择我们要校准的相对的角度,然后点击测量, 在可用工具列表这边确定一下标准球的大小啊,直径是十五点八七五八,好,确定,再点击测量,然后确定再确定。接着我们操作这个遥控手柄,将红宝石侧针移动到标准球上方, 点击一下,然后按确定键啊,他就开始自动校转啊,然后校转完之后我们在结果 这里啊,点击查看,查看他后面的这个小数,零点零零二啊,就他代表在正常范围内啊。
154昆山途准三坐标检测 00:53查看AI文稿AI文稿
00:53查看AI文稿AI文稿好,现在我们来说一下在建好金坐标之后啊,如何去评价 t 值。首先我们找到这种死单点,在我们要评价 t 值的位置上取点。 接着我们找到这个图标,叫做位置点开,然后将我们的食量点加入, 可以按住 shift 键多选,然后将自动的 xyz 取消,只留下 t 值,然后再上下攻杀。这里输入我们的攻差,点击创建我们的 t 值就拼好了。
131昆山途准三坐标检测 01:58查看AI文稿AI文稿
01:58查看AI文稿AI文稿喂,哎,你好,李老师,我问一个问题啊,一个轴大概有三百长,他要求你两头同心度,同心度的话老是评价不准,卧槽,我们怎样把它测准呢啊?测准的话,首先就要把坐标建在基准上面,假如说你的左边的语言为基准的话,那你就建在左边, 右边的语言为基准的话,你就把坐标建在右边,这个是第一个,第二个你那个针尽量是旋转一点,然后第三个的话,你放正的时候啊,就是拉一下水平, 那能不能勾着一个同心?不不同心能不能勾着一个投影员到记者里面来?哎,也可以,应该结果是差不多的吧,我们打个比方啊,我假如说折的话啊,你假如说都投影到这个面上的话,应该是原理应该是都是一样的,跟两边评价的结果应该都是差不多的。 就是你还有一种方法,我们可以尝试的,试试看啊,刚刚我说的是先是这样测,是不是 首先这样测,然后再再再这样测吗?对不对?对,你这样试试看啊,比如你这样子试试看,测半圆,试试看测出来结果是什么样的?测半圆是好的, 测半圆是好的,是不是?对啊,那你可以去利用这个半圆的这个测出来的结果,明白吧?因为我们平常如果说转角度来测量的话,其实三坐标他是是有误差的, 明白吧?就是我们不光是三坐标,像我们的四轴、五轴这种情况转角度之后都会有误差的,明白吧?这是不可避免的。那么如果 说你这种方式只用这个,我们这种零零幺的这种使量方向来测的话啊,那么这种方式的话,他是不存在转角度的一个问题的,是不是啊?对,你就直接拿这样的测出来的数据就可以了啊?好,谢谢啊,好,不客气啊。
 01:26查看AI文稿AI文稿
01:26查看AI文稿AI文稿为什么要让你女朋友来学三座标测量呢?因为三座标测量机是一种高精度的检测设备,所以它对机房环境要求很高。这其中包括温度、湿度、震动、电源、气源、弓箭、清洁和恒温等因素。 低温度测量机的室内空调应全年二十四小时开放,不应受到太阳照射,不应靠近暖气,不应靠近进出通道。推荐根据房间大小使用相应功率的变频空调。 第二,适度湿度对坐标测量机的影响主要集中在机械部分的运动和导向装置方面,以及非接触式测头方面。至于规定的湿度指标,我就不细说了。第三,震动厂房周围不应有干线公路,不应有与测量机同时工作的吊车,周围不应有冲床或大型压力机等震动比较大的设备,测量机不应安装在楼上。如果测量机周围有大的震源, 需要根据减震低机图纸准备低机或配置主动关震设备。第四,电源。电源对测量机的影响主要体现在测量机的控制部分, 未对配电也有专业要求。第五,气源测量机运动导轨为空气轴承,气源决定测量机的使用状况和气动部件的寿命。空气轴承对气源的要求非常高,气源需经三级过滤。 第六,弓箭的清洁和恒温检测。弓箭的物理形态对测量结果有一定的影响,所以在测量机开始工作之前和完成工作之后,分别对弓箭进行必要的清洁和保养工作,还要确保在检测前对弓箭有足够的恒温时间。 ok, 就上面六点你就能看出来他们的工作环境以及他们的专业程度,所以薪水自然也不会太低。最关键是检测是闲人免进,让你女朋友学这个,你放心啊,对吧?
1208自动化小武哥