pdps仿真教程简体中文安装完

粉丝6771获赞2.5万
相关视频
 11:20查看AI文稿AI文稿
11:20查看AI文稿AI文稿大家好,我是小木, 从今天开始我们来介绍机器人运动机构的制作,那么这一期我们先来介绍一下机器人模型文件格式转换与导入仿真软件的操作方法。市面上常见品牌的工业机器人 都可以在他们的官网上下载到完整的三 d 模型,如 abb、 库卡、科玛、史陶、比尔等。 有些工业机器人厂商甚至可以直接下载到支持 p d、 p、 s 使用的 j、 t 格式的模型文件,如 a、 b、 b 库卡。但是大部分机器人厂商只提供 s t、 e p、 a j e s 等中间格式的模型文件,那么对于这种只 提供中间格式的机器人模型,该如何制作他的运动机构呢? 我们以 a、 b b 机器人家族的 i r b 六七零零幺五五二八五型号的机器人为例, 这是我从 a、 b、 b 机器人官网上下载的机器人模型,模型文件是 s t、 e p 格式的,当然这款机器人厂家也提供了 j t 格式的模型文件,可以看到它是一个压缩包,我们先来解压一下, 从这里可以看到,厂家提供的模型文件是机器人的零部件,并不是一个 完整的装配体,每一个零部件的文件都是 scp 格式的。 对于这种零部件形式的模型,我们先要在机械设计软件中把它装配起来,我们使用的软件是卡地亚, 这里我们可以点击。开始在机械设计这里我们点击装配设计,然后我们点击具有定位的现有部件, 然后点击一下产品。一,浏览到我们解压出来的机器人 scp 格式的零部件文件,我们把它全选,点击打开, 全部打开之后他是这个样子的,我们可以先点击一下确定 这些个信息提示框,我们也点击一下确定, 可以看到它的外面包裹了一层机器人运动范围的模型,也就是对应的这个文件,我们可以给它隐藏一下,这样就显示出了机器人模型,我们可以点击一下它, 然后把它放大一下。机器人是非常完整的,这里由于我们不需要它的运动范围的模型,所以我们可以把它直接删除掉。 他弹出的这个警告提示框,我们直接点击一下,然后我们可以修改一下机器人的颜色,从他的底座平衡高关节三, 关节四,关节五关节六,平衡缸的连杆关节一,关节二,我们把它的颜色全部设置为白色, 剩下的这些都是他的管线包模型,我们也给他修改一下颜色, 把它设置为黑色。 然后我们修改一下装备体文件的名称,我们把它叫做, 就叫做这个名称, 然后把它进行音效保存, 保存的文件格式是卡地亚装配 t 文件格式,我们点击一下保存,点击是这样机器人模型就被装配起来了。 在前几期的介绍中,我们知道 p d p s 软件支持导入的外部模型文件格式是带有 c o g t 格文件的 g t 格式文件,而我们在卡地亚软件中装配好的模型文件保存的文件格式是 这种格式的,也就是卡地亚的装配体文件格式。所以在导入 pdps 软件之前,我们先要进行一下模型文件 格式的转换。魔性文件格式转换工具,我们使用 pros manager 这个软件,我们前几期介绍魔性文件数据处理的时候也介绍过了, 这里我们要将输入格式设置为卡地亚 v 五的三维模型文件格式,输出格式设置为 jt 文件格式,然后我们把它拖拽进来,点击执行转换, 这里显示确认之后,模型文件的格式就转换完成了。在这里我们可以看到转换完成的模型文件,我们可以双击一下他 用 j t 图勾软件就可以打开 j t 格式的模型文件, 可以看到这就是我们装配好的机器人模型,它是没有问题的,我们可以把它关了。然后我们要在这个 j t 格式文件的外面加一个 c u j t 的壳文件,我们可以先复制一下它的名称, 然后我们新建一个文件夹后缀,我们直接输入点 c o g, 然后把它拖拽进来,这样就在 g t 格式的机器人模型文件外面加了一个 c o g t 的壳文件。当然如果是批量生成这个壳文件, 我们可以用批处理文件,那么批处理文件的制作可以看一下前面介绍过的相关内容,这里就不再过多介绍了,我们把它复制粘贴到仿真项目文件目录当中, 我们继续使用我们制作焊枪与工装家具的这个仿真项目。在这里我们可以新建一个文件件,它的名称是 机器人,我们把它粘贴进来, 回到仿真软件,这个时候我们就可以把机器人模型导入 ps 软件了,我们还是先看一下软件的仿真项目文件夹是否设置正确,从这里可以看到还是没有问题的, 然后我们点击一下打开,我们先打开工装家具运动机构制作的仿真项目, 这里可以看到我们上一期制作的工装家具模型 型,我们先把它隐藏一下,然后我们点击 model 领,点击正义组建类型, 这里我们可以看到啊,已经直接定位到我们粘贴的机器人模型了,由于我之前测试过,所以他会直接定位到,如果是没有定位到的话,可以在这里进行文件夹的点选,并找到我们粘贴的机器人模型, 然后我们点击确定,在这个对话框当中我们要选择一下模型的类型, 我们选择机器人,点击, ok, 点击确定,然后点击插入组件,同样 他也会直接定位到,也是因为我之前进行了测试,如果这里没有直接定位到,可以在这里进行文件夹的选择, 我们选选它,点击打开,这样机器人模型就被导入 ps 软件了,我们可以点击一下它, 那么这就是我们的机器人模型,他已经被成功导入了。以上就是机器人模型文件格式转换与导入仿真软件的操作方法,我们可以对仿真项目进行一下保存,这里选择另存为 文件名称,我们就叫做 第四节机器人运动机构的制作,点击一下保存 好了,今天的视频就到这里,我是小木带给您使用的工业机器人技术,如果您喜欢欢迎点个关注,点个赞,如果您有工业机器人技术方面的疑问, 可以在评论区告诉我,感谢您的支持,咱们下期见。
174工业机器人虚拟调试 01:32查看AI文稿AI文稿
01:32查看AI文稿AI文稿打开 poops 软件, 选择根目录创建新项目, 导入机器人数模,选择机器人数模,插入组件,放大画面, 选择酷卡机器人数模, 点击图标拖动机器人, 点击移动图标, 机器人直线运动机器人关节运动 库卡机器人关节直线运动关节运动。 切换视图, 再次拖动机器人移动位置。 谢谢观看,你学到了吗?
424编程自动化 23:41查看AI文稿AI文稿
23:41查看AI文稿AI文稿就说我们出来之后,比如说我第一个,我也不不确定我到底先装哪一个,对吧?我就先装这个上壳,对吧?我就比如说,呃,我就比如说叫做装配上壳,对吧? 然后他的一个对象这个一定很重要,就说我们要针对某一个,就说我比如我要装配这个盖子,那我肯定要选择这个盖子来作为这个操作的这个对象,对吧?所以我们这个对象呢,就说我们有几种选取的一个方式,对吧?我们可以在这个对象树里面来找, 因为我们这个名字比较乱了,所以不好找啊。另外一种方式就说我可以直接在这里这里面去选,对吧?比如我选到这个顶壳,他就会在这里显示我们选的这个顶壳,然后另外的话就说这里一样的,你这个工序我是也是要挂在一个位置,对吧?那我们就直接挂在这个下面, 然后接下来比较重要的一点,就说在这里有两个点,就是大家可以看到还有一个起点有个终点,对吧?那这个是什么作用呢?就说我们 讲的一个物体的一个移动,他肯定是从一个点移动到另外一个点,对吧?那我们这里也是一样的,就说我做这个装配的过实际过程,他就是把这个 你要装配这个零件从他的一个起始点挪到他的一个终点,对吧?那我们这个时候呢,就说他默认的起始点就是我们这个零件的这个当前的这个位置, 那我们肯定其实我们按照正常的理解,那肯定应该是终点才是当前这个位置才对嘛,对吧?所以说那我们就这个时候怎么办呢?我们就可以呃,用一个小技巧啊,就说我怎么来选择他当前这个点作为他的一个终点, 我可以直接点到这上面,然后复制一下把它放下来,他想就他会复制这样的一个点到他下面。那同样的就说那我接下来就说是不是可以改他的起点呢?就说你可以在这里改,也可以到后面去改,就说后面怎么改呢?就说我们在那个路径规划里面去改, 但是就说我们需要用到一个叫做,我们不是有个叫做路自动路径规划的一个东西吗?所以说,呃,我们建议的话就说你在这里可以选择一个起点, 然后选择完之后,后续我们可以进行一个调整,比如说我们现在这个起点,我们就随便点一个位置,就让他到这个位置,然后 我们基本上可以说这个仿真的这个动作我们就已经创建完了。那这下面还有一个选项是什么意思呢?就这里他是说我们可以选择一条已有的一个路径,就说你可能一开始 我就已经把这个路径点都创建好了,我就直接选择这样的一条路径,或者说我有一个其他相同的零件,对吧?装配路径是一致的,我就可以选择一条已有的一条路径,让他照着这条路径去装配就可以了。 然后下面的话这里面还有就说我们展开他其实还有一些选项的,就是说,呃,比如说我们这个可以对这个装配进行一个描述,对吧?然后以及我们这里其实这里还有比较重要的,就是说我这个移动他的这个食堂是多少?就是我从这个,比如说这个盖子 从这里移到这里,他的一个持续的一个时间是多长?就类似于我们说的一个装备的一个,反正那个时间我们可以在这里面进行设置,当然就说我们也可以现在不设置后面都可以调的啊,比如说我们现在就默认这样先创建完,对吧?我们就可以看到,呃,你你, 你们可能看不清,那就是实际上在这里我我点选一下,就说他是有一条这样的一个路径的,就说连接他的起点到他的终点,而且中间他应该是有一个箭头的,就说他会有一个你这个 物体移动的一个方向的一个指示啊。而且我们另外可以看到,就说在这个持续编辑器里面,首先我们就可以看到他这个, 呃,他会自动帮我们把这个工艺选上来,对吧?这张序也选出来,那接下来我们就可以看一下他在我们创建完这个操作之后,他是不能动起来了,那我们就可以看到在这个持续编辑器里面可以看到这里这里一排,对吧?就有点像我们看平时 看视频的一个播放器的一个按钮一样的,我们可以点击一下这个播放,你们就可以看到,因为他比较快啊,这是为什么?因为我们这里有一个 时间的设定,就是他仿真的一个时间,我们可以看一下这几个按钮啊,他这个是设置这个仿真的一个设置,对吧?我们可以点击进来看一下,就说他这里有一个仿真的一个速度的设置,我们现在设到最快的, 他当然就比较快的一个,反正然后他中间有个一比一啊,就是说我们可以按照实际的一个,比如你是五秒钟,他就会真的五秒钟踩到那个位置, 这是我们可以在这里面进行一个设置,然后这里有一个时间的一个间隔,对吧?仿真的一个时间间隔,然后另外我们可以看到这里还有个按钮, 他就说是只要我们点了这个按钮,他默认的就是说会按照一比一的时间来进行一个仿真,那我们就直接点这个,按这个一比一的一个仿真,只要你们可以看到这个零点一,就是我们刚才设置的那个时间间隔,对吧?那这个五秒钟的含义,就说 我们这个因为我们刚才设定的这道工序他就是五秒钟完成的,所以他会在这里面都有相应的一些显示。那我们这个时候我们刚才已经播放过一次,那我现在重置一下,我们就可以看到 我们这个壳,他会到我们刚才选定的其实为止,对吧?那我们接下来播放一下,就说看他实际的一个装配的一个过程,那他想象就是说是这样装配过来的 啊,装备过来的时候我们可以看到他想肯定是会有干涩的,对吧?那我们这个就说拿到正常来说,我们这样肯定是不行的,对吧?你都发生了很多干涩,那我们怎么去调呢?那我们来讲一下,就说如果我们怎么去手动调? 我们可以看到这里有个叫做路径规划器的,他这个就是专门用来我们调整这个路径的,包括我们在这个装配仿真里面,包括我们后面的机器人,其实我们机器人 人的一个运动轨迹,虽然也就是由我们的不同的一些点构成的嘛,他最终形成这样的一条轨迹,那比如说我们现在就需要做的就是来调整一下这个路径,我们可以看到这个装配工艺这里他全是有两个这个点嘛,对吧? 这两个位置点他就是我们的一个起点,一个终点,那我们现在就需要将这个装配上壳的这道序添加到我们这样的一个路径规划里面来,那怎么操作呢?就是我们先切换到这个路径规划这样的一个视图里面来, 切换进来之后,那我们可以看到里面是空的,对吧?那我们现在怎么办呢?就说我们需要选择到,比如我需要添加的某一道序或者整个这个工艺,然后比如说我们就选择工艺吧,然后可以看到这里有一个,对吧?他说添加这个操作到我们这个 编辑器里面,我们可以点击一下,我们就可以看到他会添加进来,添加进来我们之后可以展开一下,就说看到里面,然后就是这就是我们的一个起点嘛,我们选起之后他会高亮显示的在这里面就说这是我们的一个起点,这是他的一个终点,默认就说是跟他的一个坐标重合的。 那我们怎么来调整这样的一个路径呢?就比如说我们可以看到这个点明显不对吗?对吧?比如我想调整一下这个起点的一个位置,怎么办?我们选择这个起点,然后右键其实里面会有一个这个叫做看看, 就是移动这个点的这样的一个坐标,就是说大家一定要注意千万不要去选这个去挪这个点,就是容易后面他会出现一些错误,就我们一定要用专门的工具,就说你在这里面右键的时候,他是对面可以看到的所有的下面,从这里 开始都是我们专门的一些路径规划的一些工具。然后当然就说你说能不能在这上面找到这上面是一样的,可以找到的就是应该是在 看看在哪里开在哪呢? 其实,嗯, 对,现在就在这里,然后加上这就是这一块的一些命令,这这一小块这里的一些命令,这是我们用到的下面这个命令,因为 我是习惯性直接在这里右键去选取这样的一个命令,比如说那我们想调整一下这样的一个起点,对吧?那我怎么去操作呢?就说首先我们可以选到这个起 点,对吧?然后点击一下右键,在这里选择这个移动,然后他这个你看可以看到我们这个上头他是会到这个位置吗?那我们同样的就说我可以根据他的一个可以看得到的这样的一个对象,对吧?我可以快速去调整他的一些位置,比如说 我发现这个方位不对,对吧?我可以进行一些调整, 那我们这是第一种方法去调这个起点的这样的一个位置,对吧?然后这里就是要跟大家说一下这个调整这个点的位置啊,就说你们一定要到这个路径规划里面来调, 而且就说每次调的时候尽量就说这个状态就要保持在没有播放之前的,如果播放播放过的就点这个重试啊,不然他到 后面容易乱这个位置。所以说我们为什么这个快造的一个作用,就说你们后面在仿真的时候肯定会遇到这种你们坐着坐着这个物体突然乱飞了,因为你们可能在调整某个点的时候, 肉操作了某一个步骤,对吧?他就可能会乱飞,这很正常的,就说你们一定要做好这样的一个快照,我方便你们后面做这样的一些后续的操作 啊。当然就说我们这肯定是调这个第一个点,对吧?那如果我发现这个点其实你看其实也很乱,对吧?我也不知道他具体位置在哪,那我们能不能用这个命令来,就说调整到我们选定的某一个点,对吧?那我们就来试一下,你说我们现在选择这个点,对吧?那我点这个 跳转的一个工具,那一开始我肯定默认我还是选这个就他自身的这样的一个坐标,对吧?接下来我让 来跳转到这个我们选取的一个点,比如就这个边界点的,我们可以试一下,看他能不能跳过来,我们点击一下也不累,我们发现他点是过来了,对吧?但是我们这个物体没有过来,那我们这样实在是行不行呢?我们可以试一下,就说看他会不会出错,我们先关了,对吧?这个时候我来播放, 他会让我们重置一下,然后我们可以发现想他还是能过来的,对吧?就说他会照着我们选取的这个跳转的这个命令,这个点还是能跳过来的,就说这个跳转的命令有什么好处呢?就说因为我们一开始选的那个题件可能比较乱嘛,就是你如果没电脑参考多个系的前提下, 你去选他肯定是比较乱的一个位置,对吧?可能是空间中的任何一个点,那我们就可以通过这样的两个工具来,就说一个是这里面一个调整这个点工具,一个 说调整的过程其实是比较繁琐的 啊,比如说我们现在调好这两个点,那我们可以就说啊,我们刚刚才看过,就说你已经模拟过一次返程之后,你要重置就可以点这个,他说意思就是你可以跳转到他的起始位置, 可以跳回去,然后我们可以看到其实这这肯定也不对的嘛,这个位置很乱,那我们继续来调整一下,比如说我转一个九十度, 好,这里这个这个应该就要用这里去粘 啊,我大概转一下吧,就比如说我们调整到这个位置之后,那我现在就说 我要怎么从这里装到这里?我们可以仿真看一下,就说他在装配过程中肯定是位置不对的,对吧?他会跟这里干涉,那我们干涉检查的方式也很简单,就对吧?大家同样的去创建这样的一些干涉,那我们比如说我现在想在这个路径中,对吧?添加一些避免干涉的一个点,我怎么办呢?就说 我可以看到,首先我应该按照正常来理解,我肯定这个盖子应该是要放在这上面,对吧?然后让他再落下来,那我怎么去添加这样一个前置的点,那我们可以看到这是一个终点,这是个起点,那我们肯定要在终点前面加一个点,或者说在他后面加一个点,对吧? 那我们可以看一下这里面的命令呢?就说你看他说添加一个点,就说当前这个点在他前面添加,或者在他后面添加,那这两个命令我们在 的时候你们一定要注意一点,怎么去判断我到底在他就是我可以我刚才讲过可以在他的后面添加,对吧?或者说在他的前面添加,那你怎么去抉择?就说我们到底选哪一种方式来添加? 最好的办法就是说我哪个点他的坐标比较正就比较正确,我就选哪个点,因为我们可以看到,就说,比如说我在他的后面添加一个点, 你看我添加到他的后面,他其实他的一个参考坐标器,他是会以你选择的这个点一个参考坐标器去挪,那我们看到他本来我这个点都是歪的,那我去调,我肯定调不正的,对吧?那,那怎么办呢?就说那我还是先把这个点删掉啊, 那我就可以考虑,因为这个最终他放的这个终点,我们一开始选择他这个坐标是对的,对吧?那我们就可以在这个点的前面去添加一个点,你看我们这个 时候去选,我们就可以看到他明显这个盒子都是盖的很好的,对吧?而且这个坐标也是对的,那我们就在他的前面去添加这个点,比如说我,那就比较简单了,比如说我就看一下,比如我照的这个歪斗,对吧?我是要先把它挪到上面,再把它落下去,那这个距离的话,就说大家可以去调吗?比如说我就调到七十五,对吧? 那我就首先就说在完成这个最后这个合盖的动作之前,他是从上面合下去的。然后我们就可以,比如说我调整完之后,那我接着来,反正一下你就可以看到这个盖子他是会先到这个顶端,然后再往下面合下去, 这就怎么去?你比如说你添加一些中间点,对吧?去避免他其中的一些干涉。那当然就说我们刚才讲到一个技巧,就说你怎么去判断这个点,对吧?我到底选他在他前面键还是在他后另外一个点 后面键,这个就是你要根据你们实际,比如我可以判断我这最终这个点肯定是对的,对吧?这个位置那我就用这个比较精确的一个坐标去调,因为这样是最简单的。如果你用前面那个,我还得去找一些参考坐标系我怎么去挪才能挪到最终那个位置,对吧?这是比较累的。 所以我们就说讲究一种方法,我就用他最终这个比较准确的一个点赞来挪,比如说那我肯定,比如说刚才我们可以看到我们这个仿真的过程,他是从这里,对吧?挪挪挪,挪到这个位置了 再往下面撸,那我比如我现在想还在中间再加一个点,那我比如说我这个点,我是想让这个盖子本来我是比较杂乱的一个位置,对吧?我想让他调到中间这个位置,对吧?就旋转了一个角度,最终他过来的时候再转过来落下来,要怎么做呢?就说这个也比较简单,就是 比如说我同样的我们刚才添加这中间这个点,他的位置也是比较,就是比较正的吗?我们可以这样理解,那我现在再添加一个点,我还是以他为参考,就说在他前面添加一个点, 就说我在他的前面添加一个点,那这个时候其实我们还是在做旋转的。比如我们,比如我现在我先让他挪到这个位置,对吧?然后他想要到这个位置地方呢?他是想要带一个角度的,比如我们就调个四十五度, 那我们可以看下这个效果他是怎么样的,就说我们是可以模拟他的一个旋转的一个一个操作的。就比如说我们一开始这个位置,我们可以看一下他最终的效果会怎样,他就会转到这里,到了一个四十五再转过来再落下去。 那就说我们可以去模拟他的这样的一个时间的一个轨迹吗?当然就说因为我们人为去创建这些中间点,他肯定 肯定是就说会,呃,你说肯定跟系统计算出来的会不一致吗?我们人肯定是说你要去根据自己的经验去判断,或者说根据我们的一些呃理解去做这样的一个路径吗?这样的话就说会造成,呃,当然就说你说这个准不准确, 因为我们本来就说这个只是说模拟我整个的这样的一个装配的一个过程,就说相对来说你说完很完美的人模拟现场肯定还是会差一点。比如说我们会做到一个提前的一些预防嘛?比如说我可以对这些产权布局,对吧?我们刚才 就可以做一些干涉,对吧?避免他跟这样的一个工作台进行一个干涉,那这是我们手动去调这样的一个路径,那我们接下来讲一下,就说我怎么去做一个自动路径规划,对吧?因为我们这里是,我们可以看到在, 哎,这个这个命令在哪里啊?我们可以看到在这里就是 operation 下面,这里有个叫做自动路径规划的这样的一个工具,就说我们系统你只要一开始创建好这样的一个装配工序,它会有一个起点,一个终点,那我们系统就可以自动去帮你计算。 就说在这个过程中我可以去避免一些干涉,然后尽量的比如说我可以选择这个路程最短,对吧?去完成这样的一个操作。那比如说我们现在来创建另外一个,我们现在这里是装装配了这个上壳,对吧?那我们接下来就说我装配一个这个 装配这样的一个插头吧,那这个插头的话其实也很简单,那我们同样的就说一开始我肯定 我们刚才讲,呃,讲了创建这个工序啊,其实有几个小技巧,就说我们可以看到我现在是没有选择任何的一个对象的时候来创建,我们可以点击一下这个创建这个对象,我们可以看到他下面都是空的,对吧?什么都没选择,那我们 举个例子啊,比如说我现在来选择这个,就是我最终我要把这道序放在这个工艺下面,那我先选择这个工艺,然后我来创建,我们可以看到看一下跟他的区别,他先默认这个 他的一个归属的一个位置,他就给你选好,对吧?这是我们选择的这样的一个归属啊。比如说如果我现在直接把这个我要做仿真这个对象选好,我来创建, 我们就可以看到他想象这里对象会选好,对吧?其默认的这个起点也给你选好了。那如果我们把这两个东西都选上, 我们再来创建,我们可以看一下他,虽然基本我们要做的事情就很少了,就你基本就是已经把这些东西都选好了,直接就创建完了。就说我们在创建的过程中实际上也是有很多的一些这种小技巧的,其实在我们后面讲到的不管是 呃人机可能没没这么多这种选择,就是说在机器人这里也是一样的,就是你可以先把你要做的这些对象,对吧?以及他要放的位置你都选好再来创建,这样的话就说我们可以减少中间的一些操作,对吧? 那我们首先,呃我们这次的话就说我们刚才这个起点吗?我们是随便选的,对吧?比较乱,那我们这次我们先来 创建一个参考座位系,就是看一下这个参考座位系能不能为我们提供这样的一个选择的一个方式,对吧?比如说我现在我需要把这个插头就是从 这个位置把它把它给拽过去,是吧?那我们先创建这样的一个参考坐标系, 比如说我们在这个这个平面的这个点上来创建这样的一个参考图标题 啊,选不到这个终点,哎,我就选择这个这个底面的这个终点吧,我就随便先创建一个,然后我们现在这个是我们刚才创建这个座位系列啊,我改一下这个叫做 我们创建完这样的一个坐标器,那接下来就说我们来创建我们这样的一个装配工序,对吧?首先我还是选择这个这个他的一个归属,然后以及我们这样的一个对象, 呃,这个时候我就来创建我这样的一个 object 的 pro。 那接下来就说我们起点,我们要把这个东西就是说他最终的这个位置,对吧?我们要放在他的终点,就是还是刚才我们讲过的一个复制粘贴的一个操作, 这个时候我们这个起点呢,我们就选择一下我们刚才创建好的这个坐标器,对吧?我们看能不能选,就我们直接到这里面来选,就这里我们选择这个参考坐标器,我们发现是可以通过这种方式来选择的,对吧?那接下来我们就来点一下,我们把这个工序创建出来, 那我们可以看到啊,就说看到这两道序啊,他是并排的,对吧?那我们在做防震的时候,他肯定是一起动的,那我们来也可以给大家验证一下,就说我这两个东西会不会一起动,我们我把它放下来一点,就说这个时候我们先看一下 他是两道序在一起的,我们来放放一下,你看他这两个东西会同时去装配,对吧?肯定不对的,就说在我们实际装配过程中基本上很少说,除非你是很大的一个产品,对吧?你可以多个功能同时去操作,那我们对于这种单一的小产品肯定是一个一个装, 那我们怎么去调整他的一个装配顺序呢?就比如说我想现在先装完这个尚可,再来装这个插头,对吧?那我们就需要在这里我们这个叫做实序编辑器的,我们可以看到这里面有两道序,对吧? 那我需要做的就是说我先装配完他,再装配完他,他意思就是我想这个东西我是要接在他的后面去做,对吧?那我们这个时候怎么做呢?我可以选先选择这个你要先做的对象,然后再用按着 ctrl ctrl 选择这个你后头的 对象,之后呢就在这里做一个这个叫做链接的一个操作啊,我链接一下,大家可以看一下变化,然后我发现,哎,他中间这里虽然是多了一个这样的一个箭头的,他就会把你这两道序连起来了,而且你看这个装配的时长他也会变成十秒钟了,对吧?因为我们两道序他都是五秒钟啊,我们接下来可以看一下这个链。
3牙牙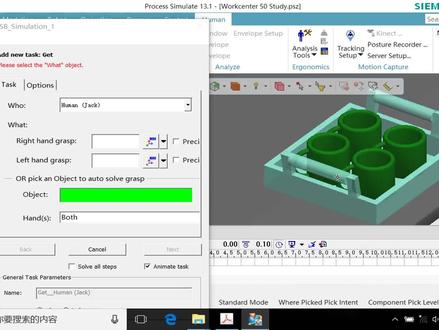 14:51查看AI文稿AI文稿
14:51查看AI文稿AI文稿对象,然后这个时候我们刚才是这里分别选了两个点,是吧?我们这个时候我们不选,其实也是可以往下一步走,说我让他走过来,对吧?这时候我们看一下大概这个位置需不需要调整,我们可以改变一下这个 人的一个方向,对吧? 首先就是我们在这里来改一下,看这里你看这个人他自己会去算,对吧?这个姿势肯定比较乱,这次我们来改一下这个手势,我们看在这里能不能通过刚才那个方式来改, 我们可以发现其实这里也是可以改的。这个楼我们抓完这个手势之后,其实我们这里其实也可以把它加进来,这个加进来之后我们看一下他这个手能不能调,我们发现这个位置他不让我们去改这个姿态,对吧? 那我们调完这个手势之后,我们可以到这里来改,比如说我们刚才调的应该是左手吧,左手了,我们可以改完这个卧卧姿之后,我们就来这里调整一下它的位置。 呃,然后我们发现其实操作的时候这个东西一直阻挡我们的视线,是吧?我们可以先把它隐藏掉,其实这个应该是 看一下这是哪个对象啊?这个对象我们可以先把它隐藏掉,然后再调,调整了,调整之后再把它显示就可以了,我们先调整这样的一个左手, 因为我们刚才手势的手势应该是已经调好了,对吧?然后现在只是说调整他一下位置, 因为我们不需要去调整他这个让他不需要让他系统去判断他到底怎么抓,对吧?好,我们已经帮他默认已经好设好了这个手势,而其实我们只要调整到对吧对应的位置,其实这样我们可以到时候来看, 我们先调一只手,可以看到这个实际上这个抓的就比我们刚才继续调那个好很多了,对吧?然后这是我们第一个方式调,就说怎么去调这个姿势,我们先调一个手,对吧? 然后我们调完之后创建,创建完之后我们来看一下另外一个手,我们还有另外一种方式怎么调,就说我们创建完这样的一个抓取的一个动作之后,我们还可以创建一个这个叫做 重新抓,就是定义这个抓起的一个姿势,因为我们刚才这个呃左手已经定义好了,对吧?其实我们这里只要改一下右手,其实也没关系,我们就直接定义两个手,定两个手的时候我们关了,然后 操作方式实际上是一样的,就说我们还是要选到这个,然后这是我们定义这个右手嘛,对吧?然后我们还是用这个姿势,然后我们 接下来就说我们可以看到他这个定义这个童抓曲,其实我们在这里就可以去挪动这个手,然后比如说但是这两个有什么区别?就说我如果用后面这个,他会在外面多多加一个操作出来, 呃,这个调整的话就说也是只要你调到相应的一个位置,其实看起来就还抓,抓起来就还可以了, 其实大家也不要想就说,呃,被我前面吓到了,其实这个人人机其实调节也很好,也还可以,之前新闻子也能有人拿这个 jack 做了一支舞蹈,就是这个人在那里跳舞,这个 一个这样的一个视频,只是我刚才没找到,呃,等一会休息时间我来找一下,看能不能找到啊? 然后可以看到我们就这样,其实这样调整完,对吧?我们看一下这是第二种方式,调整完我们还是关了,对吧?勾一下,然后一下 我们可以看一下整个这个仿真的一个效果是怎么样的?看这个人过来,对吧?我们放到细节上第一次 get 的时候,其实我这个左手就已经抓好了,对吧?他其实在这里会多这样的一个 重重抓取这样的一个动作,我让他的右手再去抓一下,就说两种方式来调这个手势,其实你们看现在这样这个人这样端着这个盘子,就跟我们属于正常这个人端盘子手势就很像了,对吧?基本上就可以说是一致的。 那我们这样调整完之后,我们来看一下我们把它 put 过去,它会是一个什么效果啊? 嗯,接下我们需要做的就是我们做一个在他后面放一个放置的一个动作,对吧? 然后接下我放置,对吧?然后对象的话就说还是他,我们方式的话就是用他的用空投坐标器去挪吧。 然后我们可以看一下这个人在端的这个过程中,这个手势, 其实这个看到还是有一点不对,对吧?这个姿势,所以说这个其实还是要去调整一下,可以看到他 端过来这个手势也乱掉了,就我们可以再去调他的这个行走的这个姿态,然后去调好这个端这个盘子的手就可以了。 你看一下这他在走路的这个过程中,那个手是没有抓好的,对吧?这个盘子,那我们接下来怎么去调一下这个走路的过程 姿势就可以调整这里,然后其实同样的方式就调这个手,然后我们还是可以去单独去调整他每一个手,看一下这里。呃,这里应该是刚才是应该这样选,嗯,我去 他这里应该调整的是我们现在这个手,对吧?我看一下能不能调, 接下来就说我们还是只需要把这个最终这个手势调好,其实就可以了。 嗯,我们大概调到这样的一个位置,然后可以看一下我们调整完这个走路的这个姿态,可以看一下他走路的过程中,他是不是按照我们调整完的这个姿态。我们可以看到他这样是会按照我们调整过的那个端盘子那个姿态来端,对吧? 所以说我们然后再接下来就说看一下他放置的,其实就说我们只要调整了,调整好了这些姿态,其实你做出来的动作还是可以比较漂亮的, 你可以再来完整的看一遍,就说 首先我们这个人过来,对吧?他去抓取的时候, 因为我们是做了一个重抓取,所以说他那里会有多余 的一个动作,可以看到这个手翻过来过程其实还是可以的,然后放下来,也就说这是,呃,刚才主要就是说教大家怎么去调这个手,就用我们那个外面的这个专门有一个手抓起来这个姿态库去调,他这个手就翻,不需要我们去每个手指去挪,其实你那样去挪的话 啊,真的是很费劲的。然后看下现在快三点,然后大家就说把这个学练习一下怎么调这个手势,然后争取就说这个能把这个人从这里端这个盘子 翻过来了。另外大家还可以做一个,可以看到这里啊,这里有两个轮胎,对吧?你们可以弄一个人去创建一个操作,把这个轮胎装到这个轴上面来 写这个就说你是先我们先把一些基础的一些元素慢慢揉嘛?揉合起来就成了最终的我们的一个动画 啊。然后我再给大家讲一个,就我们之前提过一下,就说我们这个动画怎么输出吗?对吧?但是只是说了一个位置,具体怎么做我没跟大家讲过,就说我们这里大家可以看在这里有一个,在这个 procs 里面吧, 在我们微选里面大家可以看到这里有个叫 ai record 的一个命令,我们点击之后呢,他会让我们选择一个,就说存放我们这个仿真视频的一个位置,比如说我就放在桌面上,对吧?这个名字大家可以改,然后比如说我就就默认嘛, 我主要是在这下面,这里,这里可以看到这里就是说他会问你这个尺寸,对吧?呃,你是可以自定义一个画面的尺寸,也可以说我们选择这个,呃屏幕的一个覆盖率吗?是吧?我们选百分之百,然后在这个地方他有一个解码器的一个选选择, 这里面大家可以看一下,就是说他会有个什么压缩质量,对吧?然后以及我们压缩的一个程序,这里面的话我们推荐就说用这个全真非压缩,这样的视频质量会高一点, 然后如果你选择其他的话会比较模糊,然后我们录制的话就说相对来说,呃,我们可以录一个给大家看一下这个效果,我们点一下保存,他这里会有个这个按钮,然后这个时候我们就已经开始在录制了, 我们可以让他走起来,对吧?哦,其实中间我们放大缩小这个过程,他也是可以录制下来的。 如果因为我这里没做,试试图点,本来做了试图点就可以,比如说然后我们录制完之后,我们就可以点这个瓶子,然后大家他就会提示我们已经录制成功,对吧?我们可以看一下这个视频就在这里。然后这个质量的话,其实只能说一般吧, 这是我们怎么去录制这样的一个动画?当然就说因为我这个视图我是在访问过程中自己在调吗?而我们如果添加一些视图中心点的话,他会效果更好一点啊?这就是教大家 怎么去做我们一个仿真动画的一个输出,就在这个 oppo recent 里面有这个 ay 旅客。然后大家接下来就说练习一下我们刚才讲过的这个手势,怎么去调这个手势。
4牙牙- 15:56查看AI文稿AI文稿
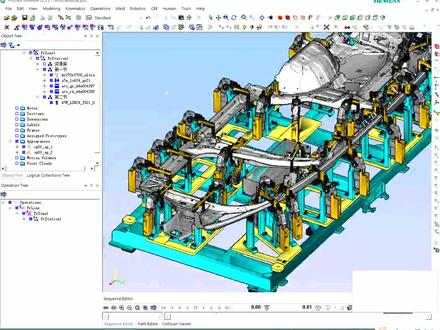
大家好,我是小木, 我们继续,今天我们来介绍一下机器人运动学关系的创建,首先我们打开上一期保存的机器人运动机构制作的虚拟仿真项目,这里我已经打开了,打开之后我们在左侧的对象术当中点选机器人模型, 然后在猫的领踩到栏下点击它,点击确定将机器人模型激活可编辑状态, 然后我们点击运动靴编辑器,在这个对号框当中我们点击创建链接,第一个链接我们叫做 base, 然后我们点击一下它, 这里我们选择机器人的 base, 点击 ok, 然后我们继续创建这个链接,我们选择机器人的关节一以及关节一上的管线包, 然后继续创建链接二,我们选择机器人的关键二以及关键二上的管线包, 继续链接三,我们选择机器人的关节三和关节三上的管线包 连接四,同样的是机器人的关节四和关节四上的管线包, 链接五是机器人的关键五, 链接六,选择机器人的关键六,然后继续创建这个链接对应的是机器人的平衡缸的缸体,所以我们把它的名称修改为 这个名称,它对应的是机器人的平衡缸缸体,然后继续创建这个链接对应的是平衡缸 方的连杆,它的名称是这个 对应的就是平衡缸的连杆,这样全部链接就创建完成了, 同时这里的机器人模型也已与这些个链接相同的颜色显示。然后我们再来创建机器人各个关节之间的运动户,也就是这些个链接之间的关节,我们可以选择 贝斯与连接一,然后点击创建关节,这个时候他会弹出这样的一个对话框,名称保持默认。我们可以点击一下服装来选择一下旋转轴,这里的关节类型我们要选择为 旋转类型,也就是旋转运动裤,旋转轴的起点,这里我们可以隐藏一下吧,是显示出机器人的贝斯模型,我们把它放大一下, 这里可以显示出模型的边缘,以便于我们更好的拾取参考点。机器人的第一个关节是绕着 base 这个圆盘的盘面的中心进行旋转的,所以这个旋转轴 我们可以选择一下凸台的下表面的圆心,旋转轴的中点可以选择上表面的中心,选择完成之后,可以看到这里会显示我们 选择的参考点的坐标数据,为了保证选取的参考点比较精确,我们可以核对一下。一般情况下,这些个旋转轴他都是沿着仿真软件的大地坐标系 或者是世界坐标系的某一个坐标轴进行的平移,也就是只在一个坐标轴方向上,他是有增量的,从这里 可以看到它的 x 与 y 坐标值都是一样的,只有 z 坐标数据是有增量的,那就表示我们选取的参考点是没有问题的,我们点击 ok, 然后是链接一与链接二之间 创建关节,然后把它隐藏,显示关节一, 机器人的关节二,相对于关节一是绕着图台的轴线旋转的,所以我们可以把这个图台的下表面作为轴线的起点,我们把它继续放大一下,大概是这吧, 中点是图台上表面的圆心,可以看到这里的坐标值,他并不是很准确,我们重新进行一下选取, 继续给他放大一下,可以旋转一下, 我们可以选择 一个比较好的视角,这个视角不太对,应该是这个视角,可以把管线包先隐藏一下, 这样应该就是它的中心了,可以看到它的 x 与 z 坐标是没有增量的,只有 a 坐标有增量,这就表示我们选取个参考点也没有问题。 当然了,这里创建关节,我们也可以直接点击一下他按住鼠标左键不放进行拖拽,拖拽到连接三上,他也是会弹出创建关节的对话框,同样我们把 把它隐藏,显示出连接二,关节三相对于关节二,他是相当于绕着这个圆的周线旋转的,我们也给他切换一下方向吧。 起点我们选择这个凹面的底面圆心,终点选择这个凹面上表面的圆心, 检查一下他的数据也是没有问题的。然后继续创建链接三与链接四之间的关节, 机器人的第四个关节,它的旋转是相对于关节三绕着这个圆它的轴线进行旋转的,所以这里我们可以给它先切换一下方向吧,应该是这个面, 我们把它的管线包隐藏一下, 然后点击它的起点, 选择一下它, 看一下他的数据也没有问题。然后是连接四与连接五之间的关节, 机器人的关节五相对于关节四是 绕着这个圆的轴线进行旋转的,所以我们可以把 这个图台的圆心作为它的轴线的参考点,我们进行一下点选,它的终点我们切换一下, 就是这边的这个图台的圆心,看一下它的数据也是没有问题的, 然后我们把它隐藏显示出关节五,创建一下关节五与关节六之间的 机器人的关节六,相对于关节五是绕着这个图台的轴线旋转的, 所以它的轴线的起始点我们可以以这个图层儿的 下表面的圆心,终点是这个图摊上表面的圆心, 看一下它的数据也是没问题的。 然后 是平衡钢和平衡钢的连杆,我们可以把机器人全部显示一下, 从这里我们可以看到平衡缸的缸体相对于机器人的第一个关节,它是做旋转运动的,平衡缸的连杆相对于机器人的第二个关节做旋转运动,而连杆与平衡缸之间它是 一个直线运动。所以这里我们先创建一下关节一与平衡杠之间的旋转运动,也就是他倒他 这个关节,我们可以给他修改一下名称,我们就叫做这个名称吧。 同样的我们给他隐藏一下,只显示出关节一, 它的轴线相当于是这个图台的中心与这边这个图台的中心的轴线,那么起点我们可以选择这个图台的上表面的圆心, 终点我们就选择它, 看一下他的数据也是没问题的。然后再来创建链接二与 横杠连杆之间的旋转运动,副它的名称我们也来修改一下,我们把它也隐藏一下,显示出关节二, 可以看到这里也有一个凸台,对应的这边也应该有一个凸台,那么他的旋转轴线就是这个凸台与这边这个凸台圆心形成的这条轴线 我们展现一下, 看一下它的数据也是没有问题的。 最后是平衡缸与平衡缸连杆之间的关节,我们可以把它隐藏一下,显示出平衡缸与平衡缸的连杆。 平衡缸与平衡缸连杆,他应该是一个直线运动,所以这里我们要选择直线运动, 直线运动的运动参考线应该是连杆与平衡钢相互接触的,这个轴的轴线我们可以先把平衡 刚隐藏一下,选择一下他的轴线的起点,起点我们可以选择 连杆的圆心,然后我们把平衡钢显示出来,把连杆隐藏, 它的终点相当于是平衡缸的这个活塞孔的圆心,我们进行一下填选, 这样应该是没有问题的。当然了,这里的坐标值 可能不太一样,这是因为这条轴线它是一条斜线,并不与大地坐标系任何一个坐标轴平行,所以这里我们直接点击一下, ok, 然后我们把机器人显示出来, 这样机器人的运动学关系就创建完成了,我们可以把它关了,然后点击一下它,进行一下保存。 好了,今天的视频就到这里,我是小木带给您实用的工业机器人技术, 如果您喜欢,欢迎点个关注,点个赞,如果您有工业机器人技术方面的疑问,也可以在评论区告诉我,感谢您的支持,咱们下期见。
 16:58查看AI文稿AI文稿
16:58查看AI文稿AI文稿好,那么我们进入下一节,下一节的话呢,那么这一节我们的这个作为第二节啊,我们先复制一个这个完了之后呢把它这里把它复制出来之后呢把这个删掉。 yes, 这里我们作为第二节。 好,那么第二节我们要添加资源进来, 那么第二节的话呢,我们打算做一个这个呃扎手一个搬运的过程, 那么招手搬音的话呢,我们要用到两个,呃这个 两组,这个,呃一组这个家具啊,家具。我们把这个家具的话呢先复制进来,那么还要一个这个软件啊, 比如说把这个板面呢,从这个位置呢,从一个虚空状态,然后把它搬到这个呃这个长线上面去啊?这个怎么做啊?我们先把这里拿掉, 那么把这个家具的话呢,我们平移过来, 那么我们我们待会的话呢,把这个呃这个板筋的话呢从这一侧,然后挪到这一侧,那么这一侧的话呢是把这个板筋的话呢放到假酒上面啊。 好,我们先给他做一个这个,嗯,旋转把它写成这一轴的话呢,串个九十度,哎,拍手 外头转了九十度之后的话呢放到那边 放在这里,然后我们随着歪轴转一下啊关闭, 那么这个高度的话有点高啊,因为我们这个机器人的话呢,他有点特殊性,他这个的话呢适合往下转,那么我们把这个把它往下拉一点点, 然后走进去一点点 好关闭, 因为我们这个是作为一个,呃讲解的话呢,我们就没有做那么细啊,那么我们这里的话呢还要添加一个东西,那么这个东西的话呢,就是我们的这个这个板件,那么板件的话呢,我们可能要给他做一个 集合才行啊,我们这里的话呢集合做成这个 b i w, 那么我们把这里的话呢拉进来,那么这样的话呢,我们待会呃用板筋的话就更方便一些。好,那么这里呢,我们会呃告诉大家怎么 从这个这个主板间的话呢,添加出一个分针出来,那么这个也是为了方便我们这个后期操作啊,比如说你,你现在用的是 啊,如果说你现在把这个板件从这个原点位置的话呢挪移出来,那么假如说那别人要用,那你是不是没法再把它还回去,或者说你还回去之后呢?不是那么好用,对不对 啊?比如说那个系统作业的时候,你比如说你在这里把把人拿走了,那么人家要拿的话呢,比较麻,比较麻烦,对不对?或者说, 呃这个多年用一百年的时候,那么这时候的话呢,我们可以给他做上一个分身啊, 那么我们把这个分针的话呢,做到这个咱们的这个这里面来,点到这里,那我们选到这里,点到这里,那么这个时候作为主体的话呢,我们先先不选啊,咱们先同意一下。 hey, 看一下 psc 不能做吗? okay now, 这也可以的 啊,我们啊这个的话呢,我们把它在里面再做一个吧, 在里面再做一个这个结合体,我们把人做成为 这个 op 零一啊,我们把这个复制一下,把这个直接拉进来吧,因为我们这里的话呢,不需要一个啊, 我们是要他的全部,那么我们把这个选择这个 plus 选择这个添加到这一段 it, ok, 一个不能。 好,那么我们关闭了看一下,将新进一个盘, 这个趴的 新娘保存一下。 好,那么我们从这里看一下,看下他能不能 a。 它这里面的话呢,就是假如说你是一个板间的话呢,它是就是一个主体板间过来的话呢,它是没法做,是分成的,你需要用到一个 其他的板件才可以做啊,那么这里的话,因为我们是做练习的话呢,我们有准备这个其他的板件,所以说我们,呃这边的话呢,就给他新做了一个板件,那么这个的话呢,这个板件我们给他命名为, 你啊, 你的朋友赢了吧,我们两个人去 啊,因为我们的这个摆件的话, a b a b c d e 啊, a b c d f 啊,嗯,所以我们这个摆件的话,十五米年就可以了。嗯,保存一下。好, 那么我们这个板间的话呢?呃,因为这里面的话,我们点了一个这个啊,点了这个座位主体的话呢,我们点同意一下不,座位主体关闭,然后把这个板间的。 well, that's a great idea, 把这个平移过来,平移到这里。好, 平移之后的话呢,我们给它旋转一下,对着 z 轴,完了之后旋转一百八十度,那么再把这个板栗的话呢,挪到这里来, 好关闭一下。那么也就是说这个板间的话呢,到时候我们要从这边把它搬到这里来,那么我们看一下这个板间的话呢,到时候搬过来和这个什么状态啊?搬过来的话呢,呃, 那我们还要做一个小的一个分针啊,对,再做一个分针,那么这里的话呢,再添加一个 这个座位分成二,添加到这里面来点, ok, 点同意。好,那么这边的话是一号翻身这个 ap 啊,那么这个是 ap 二,那么我们这个翻身的话呢,我们可以先把这个呃调整到这里,这个条件上点同意。好,关闭它。 这个有点问题啊,咱们重新调整一下, 因为我们这里的话呢,刚刚没有选这个世界坐标的一个吃相啊。嗯,好,统一一下, he put。 对呀, 还原原件关闭。难道这个这个茶具它的世界坐标变了吗? 我看下这个这个的时间图标在哪里啊? 他本身他自己的世纪坐标的话是在这个位置,那么他的家具的世纪坐标的话呢, 才才来这里,得同意一下。哦,对了,因为他是单个家具啊,单个家具的话呢,可能某个零件的话,他的这个坐标值可能在外面,或者我们选错了 啊,好,那么我们的这个抓手的话呢,从这里把它丢到这边来,对不对? 飞到这边来了之后的话,那么这个过程我们怎么做?那么我们想一下抓手的一个过程,抓手的话呢,我们先, 我们我们需要用到这里啊,这个的话呢,我们看一下这里需要什么东西?机器人抓手,还有这个 这个公益数里面选择的岗位。完了,桌子这个 open 还是打开啊?那么这里一个 pick 是抓起点,还有这个放置点,那么这里的话呢,这个抓起跟放置点的话呢,它是一个三坐标, 对不对?他这个工具位,所以的话呢,我们这里的话呢,这工具位的话呢,怎么去做?这个非常关键的啊?那么我们这里的话呢,需要复制出两个这个抓手来,因为 抓手的 tcp 的话呢,才能对准抓手的 tcp, 对不对啊?因为我们我们首先要看一下这个,这个机器人的话呢,他的,他的每次运动的话呢,他的 tcp 点是哪个啊?那么我们这个的话呢,是抓手的这个这个端点的 tcp, 好,那么我们先把这个抓手复制出来,复制到这个第二集里面, 然后呢我们把这个抓手的话呢,一个他丢到这个呃,这个板凳上面来给他同意一下, 好,那么选择这个,然后选择这个世界坐标啊,然后把这个遇到这里来。 盒子啊,那么哇,这里,这里能抓到吗?哎,不管了,先把它抓过去,对不对?那么这里的话我们可能抓不到,对吧?这里看一下, 因为我们的呃这个方向往这边偏的话呢,这个抓手可能抓不到他,对不对?所以我们这里的话呢,我们需要把这个抓手跟夹子的话呢,我们换个,换个角度, 不能画台,我抓不到,就啊不是特别好啊,那么我们看啊,转一下,转个一百八,随时追走,追走一啊,好, 那么这样的话呢,这个工具工具坐标的方向的话就朝内向,朝内边的话呢,我们 我们做啊,那么第二个这个我们需要站个角度, 或者说把它呃倾斜一点点也可以啊,我们这边的话呢,把这个抓手给他先倾斜一下啊,或者将板。
1牙牙











