abb机器人20205怎么解决

粉丝976获赞3361
相关视频
 03:54
03:54 00:47查看AI文稿AI文稿
00:47查看AI文稿AI文稿安装 app 机器人仿真软件 robots 丢丢失败了,该怎么办呢?我们安装失败的原因呢大致有这么几条,第一条呢就是没有提前推出安装软件和关闭防火墙,这个时候呢,我们要把安装要求提到的该关的呢都关掉。 第二条呢就是我们安装的时候路径呢,用了中文可以查看一下软件桌面图标的属性来确认一下。第三条呢就是电脑少了软件必须的组件,我们可以直接网上搜一下,确定组件下载安装后重新安装或者是修复一下。 四条呢就是电脑的系统问题,可以试试用安全软件体检修复一下,如果还是不能安装,建议重新装一下系统。第五条呢就是电脑的配置不够,仿真软件的安装呢,对电脑配置还是有一定要求的,如果配置过低,只能对配置进行升级。安装失败的这五条解决方法明白了吗?
501机器人小王老师吖 00:44查看AI文稿AI文稿
00:44查看AI文稿AI文稿我们在操作机器人的时候呢,有时候会遇到这样的一个错误提示,说机器人遇到了转角故障,那这个时候怎么办呢?我们只要把这个错误点击确定之后,继续操作机器人就可以了。 那么既然这个错误不用去处理,我们可不可以让这个提示就不再出现呢?当然可以了,点击视角器里的程序编辑器, 进入我们程序编辑的模块,添加指令,在 setting 指令里面有一个叫 corner pass warning 的这样的一个指令,这个指令后面我们看一下写的是什么?是 force, 我们这条指令添加完之后,转角路径就不会再被提示了。
36智能研发培训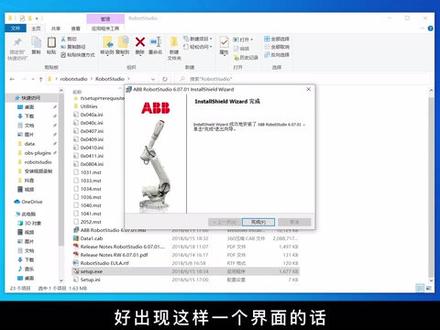 05:03查看AI文稿AI文稿
05:03查看AI文稿AI文稿大家好,今天给大家介绍一下 abb 机器人的软件安装步骤,首先我们打开我们的这个 i 联软件安装包,好,找到这个若波罗斯丢丢这个文件夹啊, 打开之后里面有一个这个 sira 这样的一个应用程序啊,双击 啊,双击之后啊,他会弹出一个弹框啊,选择我们的这个软件的安装语言,那么他默认是一个简体中文啊,那么我们也选择这样的一个简体中文,点击确定好,那么他会弹出一个弹框啊,我们点击下一步。 好,这一步的话我们接受啊,接受许可真中的这个条款,点击我接受,然后点击下一步。好,接受, 然后这个地方呢,是需要你去选择这个软件的一个安装路径啊,他默认的话是在 c 盘里面的,当然你可以点击这边的更改啊,去更改你的这个软件的安装路径啊。 嗯,那么我们一般的话,选择他的一个默认路径就可以了啊,如果你要把它放在其他盘当中啊,你可以创建这样的文件夹,但是呢,保证你的这个路径的话,呃,不要有中文啊,否则的话会安装失败啊,那么我们就选择他默认的这个路径。好,点击下一步。 好,那么这个地方啊,我们选择这样那个完整安装啊,完整安装,点击下一步。好,点击安装 好,等待它安装完成啊,好,出现这样一个界面的话,就是我们的这个 app 软件啊,已经 安装成功了,点击完成,那么点击完成之后,我们可以看到我们桌面上会出现两个这样的一个图标啊,一个是有一个括号,有个括号三十二杠 beat 啊,这个是一个三十二位的电脑的话,他的一个按照那个软件,那么我们一般的话都是用的是这个啊,没有没有这个标,那个三十二位的啊,所以说这个呢,我们可以把它删掉啊,这把删掉就可以了, 然后呢这个是我们的软件啊,已经安装完成了,那么下面的话我们要去啊破解一下这个软件啊,破解一下,那破解的方法的话,我这边啊给大家稍微归纳了一下啊 啊,首先啊,我们先将这个软件安装完成啊,安装完成过后之后啊,我们要去, 嗯,找到我们这样的一个注册表啊,同样的方法啊,还有温度斯加 r 啊,这个按键可以打开,好 好,里面输入 r e g e d i t, 好确认,然后再打开这个文尼牙。之后呢我们啊,因为我们是六十四位的电脑,所以说我们找到这样的一个路径啊,找到这样一个路径 应该是这个啊,然后找到 soft, 对了, soft 里面找到六四三二啊,嗯, microsoft 好,点开, 然后 sslpslp。 好,这样, 然后找到之后啊,我们找到他最后这样的一个文件啊,叫 no no lock dis 键啊, 这个啊,双击双击打开之后是一个这样的一个啊,在这样的一个路径下面啊,找到这样的一个文件,双击打开 他会出现一个边解二禁之术啊,边解二禁之术,然后选择倒数第六行啊,数一下啊,一二三四五六啊,倒数第六行,倒数第六, 从左到右第六个啊,一二三四五六啊,这个这个呢,选中它啊,选中之后等一下啊,选中它之后啊,把它改成 f 四, f 四,好,然后点击确认。 ok 啊,那这样的话就完成了,那么我们打开我们的这个软件。 好,那么这边可以看到啊,我们这样那个密要将在八千五百天后过期啊,这样就已经破解完成了啊。 ok, 好,那么这个就是我们关于 app 机器人软件的一个安装步骤啊。
42辉煌岁月 01:01查看AI文稿AI文稿
01:01查看AI文稿AI文稿在手动模式下,如果我们想要运行主程序,首先呢需要把这个指针移动到这个主程序里面,还有一个更方便快捷的方法,可以把 abb 设置成上电后,指针自动移到这个主程序里面。我们首先呢创建两个 io 信号,分别是数字量输入信号 da 三和输出信号 do 三,我们点击主菜单, 点击配置主题,选择 io system, 选择这个系统输入界面,在这个界面里添加一个信号名称,我们选择 di 三,动作呢选择 p p 移至主程序, 这个呢我们选择 tiktok, 一,点击确定,我们再点击系统输出界面,点击添加信号名称,选择 do 三,这个呢我们选择上电 motor on, 点击确定,我们双击 cross 可能 action, 之后点击添加,把这个 di 三和 do 三关联一下,就全部配置好了,这样的话我们重启后就能实现机器人电机上电指针自动移动到主程序这个功能了,明白了吗?
544机器人小王老师吖 03:43
03:43














猜你喜欢
- 2566吾心心