安川焊接机器人焊接方法怎么修改

粉丝1698获赞5815
相关视频
 01:17查看AI文稿AI文稿
01:17查看AI文稿AI文稿嗯,大家好,我们现在看到的是我们车间一楼车间的一个展机,它的品牌是日本安川的, 然后他的臂展是两米的,负载是十二公斤,他主要是由机器人本体以及他低他两百的柜子,还有我们现在在配的一个肯备的焊机,他主要是焊铝的。 然后现在让我们工程师给大家讲一下这个施教器的一些基本的操作。刚开机的话就是这样的一个页面,我们这边是坐标,我们需要按一下这个坐标把它一般编程的话就用直线坐标,然后这边是做好准备,然后后面的话是像像使用的一个键, 按上,我这个会强调强大以后都是重金钱的,这是 s, 不走外手和对手全面 左右往上下,这边调四五六轴,得这边一加一紧是外部轴,这个是八加八紧是另一面,这边的话是可以翻译一下光标的。这个选择的话,比如说一个程序里面我可以按一下选择 选择动物,他这会就可以选择他这边的速度可以修改清除的话,在程序里面是可以当返回键的。
1071搞焊接的小汪 01:44查看AI文稿AI文稿
01:44查看AI文稿AI文稿然后这个这个数字的话就是一一到九,然后他们上面会有汉字标注送丝、坠丝就是引湖、收湖。 保护器的话就是可以测定一个器的数值,可以规定的协调的话是加了外部轴要使用的单轴联动,是按了之后他这边会显示一个外部轴,然后联动,按照这个轴机器人和外部轴都会动。 转换的话是一个辅助键,按着转换去按选择,就可以批量删除一些程序, 然后想运行整一整遍程序的话就是按在后面,然后按连锁实验型,他就可以运动整个程序,运行一遍 前进的话就是一步一步运行,按着前进,等这一条指定走,走完之后他就需要用光标翻到下一个,再按前进, 这边就是他的一个编程了,编程的话就我们需要按一下回车,他就可以建立到一个边,建立一个点位,然后你要是想在他们中间插入一个点的话,就需要按插入,然后回车,如果想删的话就删除回车。 修改的话就是把一个点位修改到目前在机器人的一个姿态,这边修改回车都修改好了, 然后就是这里,这里是我们的一个指令,按这个是可以切换的插口方式,然后这现在是目的,就是空运行的时候用用他的指令,这是焊接的时候用的木然二, 这是慕斯,就是画圆弧的木 s, 一般是不用的,我们目前就用到这三个。
 01:57
01:57 02:20查看AI文稿AI文稿
02:20查看AI文稿AI文稿解伤体积虚延时方式他有两种,一二三四他是指的你摆焊的整个过程中的几个关键的点,一三就是你比方说是单摆的话,单摆的话你提前走到这边,两边的点指的是一三二四的话指的就是中间的点 s, 等会我会给大家演示你,假如说是你的汗摆的幅度不是很宽的话,你只需要设置一个一三就可以了,然后 s 就不用设置,但是现在你看他默认的是摆放停止,我们要选到一定要选到机器人停止, 你要成为机器人停止,因为一般情况下摆放发泄工艺是在两边要停留,两边是要停留的,你摆放停止的话,你是像机器人要停止,还不是,嗯,还不是摆放停止,所以说我们要切换到机器人停止,现在就是你停的时间,根据你的 实际情况,你调的时间,我先设置一个零点五秒一三五,设置一个零点五秒二四,我就可以不用设置,然后现在我就把这些仓鼠就设置完了。然后刚才忘了讲这个 停滑停滑关和停滑开,停滑关和停滑开是啥意思?假如我把停滑关的话,他从这个点,他这个点他就是一个,嗯,相当于没有停滑,没有一个停滑过度,如果我我开的话,他就会有一个类似圆弧过度的样子,好,这样子 我先打开,然后咱咱们就把所有的参数就设置完了,然后这这就是摆放的相关参数就设置,设置完了之后我们就可以正常连场,接下来就是正常自己的回击, 然后走到这赶快结束,同样的需要添加命令,个月以来让他结束,结束就不用添加任何命令,直接结束就完事。然后再给一个熄火,熄火一样, 最后的话给个零点五秒的延迟填一个弧框,这样一个完整的改换程序就变完,然后让机器人回去,就这样, 然后我们手动运行程序,看两边的点,就是我停留一三的点,我设置零点五秒,他就停留零点五秒,然后假如你,嗯,他摆的现在我刚才认识三毫米,总共加起来一十六毫米这样子, 两边是三毫米的意思,那就这样好,然后时间小,没有问题,没有问题我们就可以直接,我们就可以直接让提前回去,然后就可以使用时间。
1067新迈驰工业机器人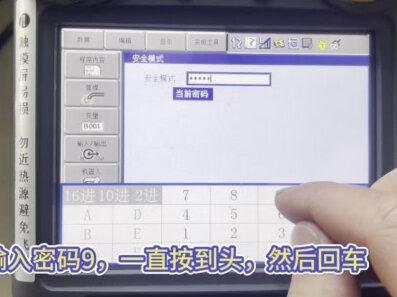 01:09查看AI文稿AI文稿
01:09查看AI文稿AI文稿下面讲一下安川机器人的四种安全模式,一、选择系统信息安全模式,选择里面的编辑模式,编辑模式没有密码,显示一把钥匙。二、选择编辑模式, 密码输入零,一直按到头,回车显示两把钥匙,说明进入编辑模式。三,选择管理模式, 输入密码。九,一直按到头,然后回车显示三把钥匙,说明进入管理模式。 四、选择安全模式,输入密码。五,一直按到头,然后回车。 三把钥匙旁边出现一个加号状,说明进入安全模式。 最后一个是一次管理模式,需要厂家给定,一般用不到这个。
193工业机器人4S店













