ABB机器人搬运程序流程图

粉丝4.1万获赞13.6万
相关视频
 26:41
26:41 04:00
04:00 16:35
16:35 01:14查看AI文稿AI文稿
01:14查看AI文稿AI文稿上一期我们讲到了如何用 a p p 机器人直线对物体的搬运,今天我们讲一下整个程序的构成。我们这一套程序主要可以分为三大部分,就是点位,然后延时。最后在关于夹爪的动作,我们可以看到第一个点位就是我们设置的安全位, 就是在这个位置,然后我们运行一下程序, 他将会到达物体的上方。第三行程序就是夹取目标的点, 然后这个时候我们就要打开假转, 然后等待零点三秒, 这样再回到一个安全位, 再往目标点运运行,这样就到达了目标点上方。接下来我们往目标点运行, 到达目标点以后再关闭假爪,再等待零点三秒,最后回到安全位,这样整个搬运的过程就结束了。
 22:56
22:56 01:40查看AI文稿AI文稿
01:40查看AI文稿AI文稿常考题是我们工业最先马舵程序的调试。参照视频资源手动运行搬运马舵程序,完成搬运马舵程序 p 拍了太极一的手动运行和验证 程序,在手动模式下验证礼物后,才可在工业机器人系统的自动控制模式下运行。在程序模块 ppelot 太子中新建 may 程序,并在 may 程序中调用搬运马舵程序。 ppela 太子一 将控制柜模式开关转到自动模式,并在社交器上点击确定确认模式的更改,将程序直 移动至主程序内中,按下电机开启 确认,切换为自动运行模式,且电机启动,试教器的状态栏信息显示。如视频所示,按前进一步按钮可逐步运行搬运马舵程序。 按下启动按钮则可直接连续运行搬运马舵程序。视频所示为搬运马舵的整个公益流程。
82评评 14:53查看AI文稿AI文稿
14:53查看AI文稿AI文稿啊,哈喽,大家好啊,我们这个视频呢,来做一个 a b b 机器人的马舵程序,马舵,马舵程序的一个啊,它的讲解吧, 首先呢我先列出来我们在马舵的过程中呢需要什么东西,我先把它列出来。 好,首先我们所用的指令木 l 啊, move j, 这两个不用说,两个运动指令啊,一个 move l, 一个 move j。 然后呢我们要打开关闭吸盘,也就是 set 和啊和 reset 两个打开 开关闭吸盘,然后呢我们需要用到一个功能函数,叫做 off 的偏移, o f f s off 啊,偏移,这个叫做偏移。 然后呢我们还要用到,嗯,跳转, go to, go to 和标签 level 啊,这两个是一对啊, go to, 跳转和标签 level。 好,这是我们所需要用到的指令,其实程序呢非常简单啊,程序是非常简单的,我们用 go to 呢,主要是为了做循环 啊,主要为了做循环,如果想跳出循环呢,那就用衣服来跳出啊,这个我们后面再说。然后呢我们要用到的几个 io 信号, 一个呢是 d d o 零表示吸盘, d o 零呢表示吸盘,然后呢一个 d i 零表示我们的有料信号, 然后嗯,这边我再加一个指令吧,加一个 wait 啊, wait time, wait time 表示什么呢?等待时间,好, 基本上所有的东西呢,就这么多啊,就这么多没有了。 然后我们在程序里面来看一下,来看一下还用这个工作站吧, 做一个简单的马多 好。我们打开我们的视角器,首先第一步呢肯定是视角点位,这边我已经视角过了啊,我已经视角过了,我们来看一下我视角的位置在哪里? 好,我先把这个里面的程序呢全部给他清掉啊,把这些都删掉, 然后主程序中编辑,再点编辑底部好,最后一行好全部删掉。现在呢,里面是一个空的程序,但是呢,它里面是有一些程序数据的 啊,有程序数据的,比如说 robert get 呢,有一个抓取和放置这两个位置。我们先来看一下啊,抓取和放置的位置在哪里 啊?是不是我们想要的这是如果你要是在工作中呢,这是必须要做的啊,抓取和微和放置呢的点位具体位置在哪里?是不是我们想要的这个地方? 好,首先是抓取,看到没有,我们的抓取位置在这里,这个呢就是我们传送带哎料到达这里呢,进行一个抓取,然后呢我们来看放置下一行 好,放置点也没问题,在放置的我们的料盘这里啊,也没有问题。好 啊,非常准确啊,没问题。既然这两个信号都有了,以后呢,我们就开始写程序啊,直接开始写程序,首先 我们要进行一个把两行删掉啊,在程序的开始的时候呢,我们是不是要进行初始化?末五 a, b, s, g 干嘛呢?回到 home 点,这个我在前面的视频中呢有讲到过啊, 如果想学的话可以看一下。回后目点,用轴运动的方式呢。回到后目点,然后我们来写一个抓取的程序。 首先我们需要移动到我们的抓取点的上方,通过 off 偏移啊,向抓取点的上方偏移,一个高度 两百吧啊,抓取点的上方,然后呢添加指令 mobile, 我们来到抓取点啊,用 finer 型定位, 哎,不能修改位置啊,然后呢,我们要打开吸盘, set 丢零,然后等待时间。 with time。 with time 为 time 多少呢?零点五吧,零点五秒。 好,然后呢,我们再来添加,添加一个 movie 啊,或者说我直接就复制粘贴吧,这样更轻松一点。粘贴好,把这个呢更改为 movie 啊,就是说这步呢,就是从抓取点的上方移动到抓取点,然后打开吸盘,再次回到抓取点上方啊,然后呢开始放置,我们走到放置点的上方。 好,一样的 off 的偏移,放置点上方,零零 两百。确定啊,这是在放置点向 z 轴偏移两百, 然后呢,我们再移动到放置点。 mobile 放置要用 final 性定位 好,然后我们来 reset 丢零, 那复位,我们的吸盘让物料呢放下去,然后再次复制进行粘贴, 更改为 mol。 好,这一套流程呢,其实就是一个抓取和放置的一个过程,我们可以看试一下,调试 pp 一直慢,让它移动一下,试一看。从 home 点出发 好,到达抓取点的上方,下去抓取,打开吸盘,回到上方 放置,再回到 home 点。哎,这个流程其实就是一套抓取和放置的过程啊,调为单周, 让它连续运行了啊,它会停到 home 点,其实这是又是一套正常的抓取和放置的过程,如果我们想让这个程序呢进行循环起来,那我们就是无非添加一个 go to 指令。 go to 标签呢,添加到这里 啊,标签起个名字简单一点吧。循环,然后呢, go to 跳转到循环标签。 好,这样的话我们就会重复抓取和放置这个过程啊,从这里面呢跳转到这里,然后继续进行, 然后啊,然后我们要开始定义变量了,什么叫做变量呢?因为我们是要放置,对吧?我们今天呢就写一个简单的抓取和放置啊,不 抓九号方志啊,简单的马舵啊,我们写一个简单的马舵,什么意思呢?我们这个马舵呢是从这里开始摆放啊,摆放小圆饼,然后呢一层一层的往上面走一个,再一落一个,再叠加一个,叠加一个,叠加一个,一层一层往上走。 好吧,单排的马舵,其实我们可以看到啊,我们每一次摆放呢,第一个摆在里面了,第二个是不是要往上高出来一层?我们是不是每次往上面走了一个圆饼的厚度 啊?圆饼的厚度,你说这个圆饼有多厚,我们每一次就要就要需要自动的往上偏移多厚,对吧?啊?这个应该 比较好理解啊,就相当于是一个变量啊,一个变量他每一次呢都要加一啊,加上一乘以厚度, 我们摆第一个的时候呢是零乘以厚度,摆第二个的时候呢是一乘以厚度,摆第三个呢就是二乘以厚度,第四个呢三乘以厚度啊,依次类推,这样的话我能我们才能保证我们下一个的时候呢,不会把上一个给压扁掉,对吧?好, 这个能够理解的话,那我们就看这个变量呢该如何去添加啊?其实非常简单啊,其实很简单,首先呢我们来定义一个变量, 定义啊, z 等于零,因为是高度嘛,我这边就直接用 z 来表示了 啊, z 等于零,然后我们是不是每次放完的时候呢,我们让 z 进行一个字加一啊, z 等于 z 加一。 哎,这样的话,我们是不是每次摆放完之后呢,我们就会往上面加上一个高度,然后这个 z 呢从在哪里去使用呢? 我们来看我们的放置点上方在后面给他加上一个 z, 然后呢乘以厚度啊,我们的物块儿厚度是五啊,这个是设置车扰的工作站,所以说就没什么好说的啊,这个物块儿呢,你看这里啊, x、 y、 z 呢是五啊, 五十、五十五,五十和五啊,比如这个工作站的这个工作站,他是这样的,他是他们两个之间的距离呢,这两个之间是五十五,这是五十五,然后呢他们两个之间呢是五十, 然后高度呢是五啊,高是五,就是说我们的物料高呢是五,这是设定好的,这个找谁来都是这样,天王老子来了,他也是这样 啊,这个没啥好说的,好,我们继续看啊,我们把程序呢写成这样,是不是我每一次呢 z 等于零好,它就是放置点的上方两百 z 等于一呢两百加五, c 等于二,两百加十,就这样依次类推,包括我们的放置点 也需要来写一下零, x 轴为零啊, y 轴呢也是零好, z 轴呢是 z 乘以五 呈上五,每次往上偏移,同样下面呢一样的 加上一个 z。 长沙五, 好,现在我们再来定义一下啊,把气缸呢给它复位一下,其实这三行就是初始化程序嘛, 这三行就是一个初始化程序,把气缸呢复位一下,然后呢细节问题处理一下,什么呢? wait di, 等待有料信号为一,机器人再下去抓取啊,这是一个细节问题啊, 就是说我们在这个抓取点的上方呢,会等待,等待物料走过来了,我们机器人再下来抓取好,这个程序写完了,这个程序已经写完了,这就是一个 马多程序,最简单的马多程序啊,上面三行是初始化,回 home 点 z 为零啊,复位一下棋盘,下面呢,抓取的程序, 然后放置的程序放置进行自加,然后呢, go to 循环到这里,继续重复这个过程。好, 我们来仿真一下,试一下啊,仿真播放,抓取,放置,抓取,往上抓取,再往上,抓取,再往上, 怎么样?有没有学会看看哪里还不懂的,我们继续探讨。 其实既然 z 轴你懂了,那 x 轴和 y 轴呢?同理啊,同理,道理是一模一样的,无非就是 x 往这边走了, y 是往横着走了, z 呢是往上走了,把他们三个 变量全部定义了以后呢,那就是一个三维码度啊, x 轴 控制的是一条线, x 轴加上 y 轴呢,控制的是一条线加横着的线,那不就是一个面吗?再加上 z 轴呢?往上呢,那就是一个空间。其实马多程序呢,就这么简单,你说是不是很简单?这没几行吧, 这程序加起来可能有个十几行吧啊,十几行,而且抓取的程序和放置的程序呢, 到哪个程序都是以这样的,所有的码头程序都是这样的啊,亘古不变啊。 好了,这视频就到这里吧,我们有什么需要我们再再聊。
474跟着学渣学编程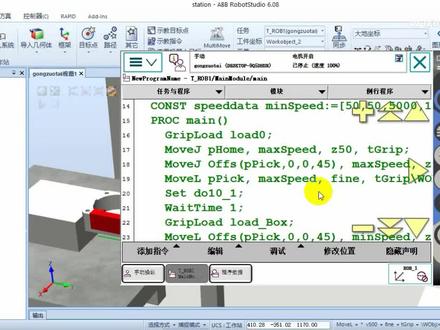 03:01查看AI文稿AI文稿
03:01查看AI文稿AI文稿啊,上一个视频呢,我们引入了一个坐标偏移啊,根据弓箭坐标系以及一个基准点啊,去做一个啊,位置的一个偏移的一个设置啊,让我们这个需要用的点数 又少了两个点,那就是那个 pptop 以及 pptop 都没有了,而且这个定位会比较精准。好,那么现在啊,如果我要求又发生了一个变化啊,这个变化一直会很多,我们先把这个机器人啊,先让他移到 曲弓箭位置啊,曲弓箭啊,不对,这是曲弓箭的正上方对吧?好,然后呢,再走一步到曲弓箭位置,然后呢我把夹爪给他松开,松开以后啊,我现在 提升要求呢,现在我们是什么?先跑到正上方,然后再下去加,如果我要求你是怎么样?是哎,先到这个边上,先到这边来,然后要加的时候呢,再这样子伸进去去取, 那这该怎么办啊?其实这个也是,呃,很常见的,比如说如果我要取第二层这边的空间, 对吧?你说我,我走到上面去,是不是很可能会撞了?我肯定是会先到侧面啊,从侧面再进去,那么如果我要这样改啊,更改他的一个曲攻线的一个路径,那么这个时候该怎么办? 其实呢,我们是仍然就是去改这一条取弓箭之前的这个指令,之前我们是在 z 上面加 一个四十五,所以说是贼轴往上,对吧?从上面往下面去,那么现在要往后退,那么这个时候应该怎么去做偏移呢? 啊?很显然还是要用到这边的这个弓箭坐标系,我们看一下如果要往后面退的话,那应该是往什么?往外轴对吧?外轴的副方向往后面退,而 z 轴不能是,呃, 往 z 轴四十五了,对不对? z 轴应该是和家具位置应该是一样的,所以我们可以怎么改呢? 我们只要点进去以后把这个四十五编辑变成零啊,然后这个 y, 对吧?这是 y, 这是 x, x 五点 yy 怎么变呢?同样点进去,我选一个,比如说负的,呃,多少呢? 负的五十,然后先负的五十,看下效果啊。负的五十,确定确定,然后我们调试 pp 直光标,然后我们来让他运行一下, 哎,就退过来了,那么这个一看,这个距离啊,呃,可能还不够,我们还要再往后退一点,那么我们再去调整一下啊,五十不够,那我就付的 一半,确定,确定,然后。
68工控社区 10:50
10:50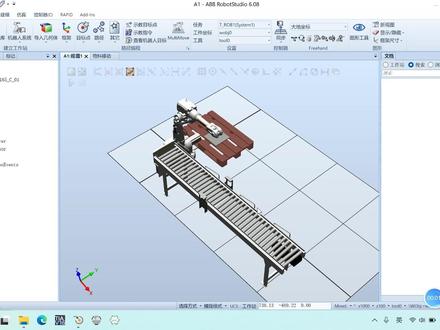 03:26
03:26









