同步凸轮在哪个地方

粉丝4.4万获赞12.3万
相关视频
 01:01查看AI文稿AI文稿
01:01查看AI文稿AI文稿电脑同步机自动剪线,经常发生剪完线留的线头太短,线从针孔飞掉。现在教大家如何快速调整剪线凸轮位置,解决线头短问题。剪线完毕以后,首先检查停针位,当挑线杆在上方位时,看机针尖与针板的距离,标准停针位时机针间里针板十二毫米。 这个时候查看碱线凸轮位置,如果发现凸轮位置像这台缝纫机一样,凸轮平面与滚轮离得太开,就会发生碱线线头太短的问题。咱们只要用内六角螺丝刀松开凸轮螺丝,对其进行调整,先打松第二颗螺丝,再打松第一颗螺丝,这时移动凸轮将凸轮平面调整,至于滚出距离一公分 也可以。这样看,凸轮平面与中轴呈一条水平线,或者与线缩上固定螺丝差不多对齐,凸轮与滚轮要留有一毫米以上 的间隙,调好位置以后旋紧两颗固定螺丝。再次测试剪线,务必保证凸轮位置正确,现在试一下效果,剪线完成线头不会太短,不用一直穿线就可以了。
3981星宸缝纫 00:23
00:23 00:25查看AI文稿AI文稿
00:25查看AI文稿AI文稿今天阿静教你们缝纫机同步最快捷的调法,后盖打开后,找到这个同步凸轮,把同步凸轮上的两颗螺丝拧松,如果同步凸轮往下调,那么送不牙就会上升,这样同步就慢了,这样做后的容易断针,同步凸轮上调,牙齿就会往下降,这样同步就快了。 同步标准的位置是机针孔与砧板孔平行,牙齿和砧板平行,形成一个机针牙齿,砧板三点一线,你学会了吗?
1.1万@阿进缝纫 01:02查看AI文稿AI文稿
01:02查看AI文稿AI文稿大家好,今天给大家讲一下我们的电脑同步车,我们在调节这个剪线凸轮的这个位置,正确位置如何去调?首先我们看我们的这个挑线杆,我们摇动我们的手动轮,把挑线杆 摇到最高点,摇到最高点的时候我们再拿我们的这样的一个六角扳手,看到我们这里两个凸轮有两个螺丝,我们把它打松,打松以后把这个凸轮把它放, 把它转过来,转到这里凸起来的这个地方和我们这里有个走珠,看到了吗?走珠平齐的位置就是我们的剪线凸轮一个标准位置啊,锁定好这位置以后,我们再把我们这两个螺丝打紧,把下面的这个也打紧 好,打紧了就可以了。然后我们再来注意看,就是这里这个走珠和我们的这个凸轮中间要有两到三毫米的这样的一个间隙,要不然他剪线的时候就会撞到。
1345星驰模板机-阿兰 00:50查看AI文稿AI文稿
00:50查看AI文稿AI文稿好,今天我们来讲一讲电脑同步贴的剪线凸轮怎么去调啊?我们把这个打开。 好,首先我们把这个跳向杆的位置调到最高。好,我们把那个跳向杆位置定好之后,我们就把那个兔轮的位置调好,这是第一个螺丝,这是第二个螺丝,我们把第一个螺丝, 哎,跟这个剪线的珠子,这样啊,平行,基本上平行就可以了,平行之后,然后这里也有点位置,可以免得他这个跟这个碰啊。好,然后把螺丝固定好, 把螺丝固定好,固定好,这样的话就剪线的图的位置就调好了。好,每天关注我,每天有更好的视频分享给大家,谢谢。
849师傅村到家 00:55查看AI文稿AI文稿
00:55查看AI文稿AI文稿大家好,今天给大家讲一下缝纫机送料同步的调节,现在我们已经把他的位置调乱了,接下来我们给他调到正确位置,一般我们从这里就可以调了,但是为了大家看的方便,我们把后盖打开,首先找到齿轮正转方向的第二颗螺丝, 再找到台牙凸轮的第三颗螺丝,松开台牙凸轮上的所有螺丝,让台牙凸轮的第三颗螺丝和齿轮的第二颗螺丝对齐,稍偏下一点,拧紧螺丝, 找到送药凸轮,松开凸轮上的螺丝,并找到第三颗,让送料凸轮的第三颗螺丝和抬牙凸轮的第二颗螺丝对齐,并稍高一点,拧紧螺丝, 再检查一下位置,正确拧紧所有螺钉,装好盖板,这样位置就调好了。
881缝制设备维修课堂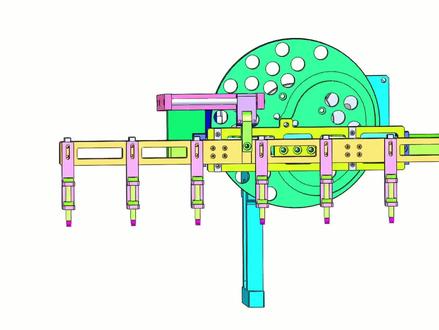 03:37查看AI文稿AI文稿
03:37查看AI文稿AI文稿等间距同步一载机构啊,到底应用于什么场合?今天给大家科普一下。好,如这个动画当中所示,我这边呢,是通过两个凸轮啊,实现了一个 x z 轴啊,等间距的一个同步移载啊,这样的一个取料放料的动作。 好,我们先来看一下他的原理呢,大致是如此,那 x 轴呢,是通过这样的一个呃移动啊,平推的一个凸轮去实现的啊,当我这个凸轮旋转的时候, x 轴发生运动, 那么在 x 轴这个凸轮旋转的同时呢,哎,通过这个最齿轮的配合呢?好,咱们这个凸轮呢也旋转,这个凸轮呢是一个摆动凸轮啊,他是管这个 c 轴的一个上下一载, 通过凸轮和连杆机构的共同作用啊,实现的一个运动。好,那么咱说一下啊,这属于什么呢?多功位等间距同步一载,我们知道咱们的 自动化设备,一般情况下就是把一个复杂的产品工艺进行拆分啊,工艺的一个拆分,拆分之后不管拆分到多个工位,我每个工位在完成了他的工艺之后,他要流向下一个工位, 那么一般有两种情况啊,使这个工位呢能够移动啊,有的情况下我们会使用这个载具,那么载具呢,一般是在这个凸轮分割器的 一个带动一个驱动下啊,去运动的啊,实现一个,呃,也是一个单节拍等间距的一个步行式运动,那么像这种呢,属于直线式的运动,就说我一起抓取是吧,你不管有几个空位,我一起抓取,然后怎么样来放料啊?啊,那么说一下,像这种突热连杆 驱动的机构啊,比咱们用气缸啊驱动的机构到底好在哪啊?大家看这个动作有什么特点?他 x 轴方向呢,运动距离呢,还可以,但是这周方向他的运动距离比较短,而且他 停留的时间也非常非常短啊,他只他只停留了很小很小的一段时间,我们从这个凸轮当中就能看出来啊,咱们看这个凸轮的远修饰员呢,他的这个远修饰角度非常的小啊,远修饰角度呢,只有五点三二度, 也就说这个歪轴啊,他基本上是放下来啊,马上就拿起来了啊,基本上是这样的,然后这个水平的保持的这个角度还是比较长的啊。啊,如果关于这个问题并不很是很清楚呢,那你可能需要先去了解一下凸轮的这个基本参数啊,主要是 这个实序图啊,你可能不是很了解,我们看一个案例啊,比如说这也是一个双轴的一个图轮连杆机接手啊,首先呢,你必须能够啊,把这个实序图呢结合上这个机构的动作啊,你也能够理解他啊。如果同学们呢,想要系统的学习图轮连杆机构设计,可以在视频的结尾处啊,看到 我的联系方式,好,那我们继续看啊,刚才说到这个问题,就是说他的远修指员这个角度太小了啊,那么这么小的角度啊,他这个吸盘呢就能停留很短的时间 啊,如果说用气缸呢,你得考虑到他这个气管,包括电磁阀啊,这都是呃,要占据一定的响应时间啊,那么你这个时间差呢,也不是很好打啊,你希望这个这么短的距离刚抬起来他就水平运动还是有一定的难度的啊,那么 如果你想啊,实现一个比较高响应的这样一个动作,你可能得使用两个模组,对吧? x 轴和载轴各使用一个模组啊,但是说这个凸轮连杆机构,他有没有弊端呢?啊?固然是有, 你像这种场合,如果说我的一载的间距要发生改变,你这个凸轮是改变不了的,但是我的模组是可以改变的啊,所以说机构啊,他是各有利弊的啊。那么如果说大家呢?哎, 想要去学会这些突入连杆机构设计,那我这边呢有一套课程啊,推荐给大家,那么大家呢,可以在视频的结尾处以及评论区看到我的联系方式。好,感谢关注! 知识改变命运,专业成就理想,想要通过学习来提高自己的专业能力,增加自己的收入,可以添加我的联系方式,感谢大家!
184非标机械自动化设计








