vericut仿真如何显示刀轨
大家好,这个视频又分享一下,等歪儿咔的进行输入车窗仿真的时候,如何看铺试图。那么这个仿真的案例呢,是一个斜轨的 数控车窗进行加工,那我们看他在汽车加工的时候,刀具刀具所处的这个汽车平面呢是斜的四十五度,但是这个软件在观察的时候,他给我们提供的这个顶啊,以及这个 前前面这个做这种观察呢,他都是跟我们这个是有一个四十五的角度,这个误差 有这个四十五个角度差别,那么所以说我们看当我们把这个刀放正的时候,那么他跟我们那个观察角度呢就是不太一样,我们在进行铺试图的时候,我们需要 选择视图,选择铺面,那我们先添加一个他默认的呢就是正的挨制这种这种情况,那我们选择铺面,那么现在如果我们这个按照我们这个 后面的方向把它转正之后呢,他跟我们这个刀具所在这个平面就不一样了,因为他是一个斜轨的,所以说我们按照他这里提供这个正的 去泼的话,就就有点问题,我们把它恢复一下,那我们再添加一个 那么正的 x, 不行,我们看一下这个正的外轴,那我们剖一下他跟我们这个道具呢,也是存在一个四十五度的这样一个角度的,这个无差, 那我们看这个 x 和 y 他们两个有什么样的这个区别,我们观察一下,首先这个呢是我们这个,这个是我们先看他吧, x 方向 是指向这个四十五个方向,然后我们看这个歪呢是指向下面这个,我们把这个刀呢先放平了,我们再观察 x 指向这个方向, y 呢是指向这个方向,那么我们发现如果我们把这个歪指向这个方向,那么他是不是就 就往这个角度, x 是往这个角度,那么把这个歪改成负的负的歪,那么他指向这个正的方向, 然后呢上面的这个正的 x 呢是指向这个方向,那我们看这两个他所代表的这个使量呢是 这个 i 的是一,然后这个是用的这个 j 呢是用的什么负一,那么如果我们把这两个同时用的话,他是不是合不出来这样一个死量了,就只向我们这个垂直面的这个方向,那么这个时候我们再添加一个,那么这个时候我们要选择 制定易,然后我们这个是一,然后后面把它改成负一,再加一个点。 好,那么这个时候我们看到这个这个视图的平面呢,就跟我们需要的这个观察平面呢一致了,我们今现在把它其他的取消掉, 单独勾选这个,然后我们去点一下铺设,那我们看到这个时候呢,他跟我们这个加工的这个点到这,我们看我们铺出来呢,就跟我们这个加工的平面呢就保持一致了, 我们可以把它去掉恢复一下,我们选择这个单独的这个 x, 咱们铺一下看一看, 我们可以看到跟我们这个是不一样的,对吧?然后同理这个歪呢 也是不一致,然后只有我们自定义的这种, 那么他跟我们这个才是才是符合我们这种要求的。好,那么这个 呃车床这个铺漆呢,就是这个选择一个自定义,然后去控制这两个适量, 没有别的了。然后这个视频呢?就分享到这里。
粉丝5865获赞1.5万
相关视频
 05:26查看AI文稿AI文稿
05:26查看AI文稿AI文稿大家好,这个视频我们讲一下点 word 卡的纺织红程序所需要的一个简单设置,以及我们在 word cat 里如何来观察我们所设置的红程序的变量,他的数值每一步之间运算的结果。 那好,首先我们来看一下我现在给大家展示的这样一个程序,现在这个零件呢是边长一百乘一百的, 他的坐标系呢是在这个中心,那么这个工程序呢就是沿着他这个周边环切 去洗这个平面,使用快手的力洗刀。那么这个变量呢设置了两个,一个是这个 五减号五呢这个等于八,是他的这个道具的每次行切的这个环距行距, 然后井号一等于五十,是这个他在最外圈的这个变长的一半,那么每次走完四个角之后呢让这个井号一呢去减五,然后呢逐渐的去缩小,去等距的去切这个平面, 那么现在呢我们来仿真一下,我们先去运行一下这个程序,那么咱们可以看到,那么他现在只去切了一圈,对吧?那么实际上我们这个程序当他这个井号一 递减了之后,只要他大于等于二呢,他都应该会跳到我们这个幺零这一行去按照新的这个数值再去走一圈,那么但是他现在没有这么走,那么为什么呢?实际上这里边我们在仿真工程序的时候,或者看看里面一定要注意单击一下这个工位,然后在这里 里边我们这个记代码这个底下,这里面我们这个一定要把这个扫描数控程序文件这个给他勾选上,那么这个时候我们再复位一下,我们去运行,那么他就可以去仿真了, 那我们也可以看一下这个道道具轨迹,那么就是这样的,那么 我们在这个调试程序的时候,有的时候如果我们能看到我们这个每个变量他们之间运算的结果, 以及他中间的这个运行这个计算的这个过程,我们就能更清楚的去发现我们的一些错误。那么在什么地方去看这个变量呢?我们可以有两个地方,一个地方呢是我们可以从这个项目数里面这个公 位这个位置单击右键去从这个接待码下面去单击这个所有变量,那么就会弹出这个亮的这样的一个对话框,我们也可以从这个信息 这个栏目下点开这个小三角形,然后呢去单击所有,那么这个变量也能够出来,那我们现在呢就是重新运行程序,我们去看一下这个变量, 我们使用单步去运行,那么首先呢他会有一些系统的一些变量的去展现给我们,我们看这两千五啊, 就是我们这个转数,然后还有其他的一些内容,我们主要是看上面的变量, 那么现在我们这边程序啊对的看一下,那么现在他下到这五,然后这一行呢下到这个 负零点五,那么接下来呢这个变量呢就有第一个变量了,这个变量呢是五号,然后呢他的这个数值是八以红色的给我们展现出来了, 然后接下来我们再看一下这个减号一,那么减号一的这个数值呢是五十,我们也能够看得见,那么接下来呢就按照这个数值呢去计算走一圈, 然后呢我们这个井号一等于五十,减去这个八,那么他现在就是变成四十二了, 然后接下来呢我们就按照新的这个参数跳到这个位置,再再去走一圈, 然后我们再去计算一下这个减号音,那么现在他的就是三十四,那么按照这个形式呢去 逐渐的去减小,我们可以看到每次呢他都会是有变化的,对吧?那最后我们是等于二,等于二的时候也去再去切一刀, 然后当他等于负六的时候,他就不满足这个关键词了,对吧?这个这一行的计算完之后,他现在是负六,他不是大于等于二了,那么他就不是跳的到这个原来的位置,他就直接抬到了。 好,那么这个时候呢,这个程序呢就结束了。好,那么我们这个 红变量,我们在这观察的时候呢,就对于有一些运算比较复杂的,或者说有一些某些数值数值,我们需要去观察中间过程,或者说是终点 判断的位置的时候,我们从这个列表里面呢就能够去比较直观的去看出来。那么这个时候,对,我们在调试程序的时候,有的时候就可以帮助我们去判断我们哪些地方去, 呃,去需要去修改哪些地方有问题,好,那么这个是比较实用的,那么今天这个这个红程序的这个案例呢,就分享到这里。
94智能制造798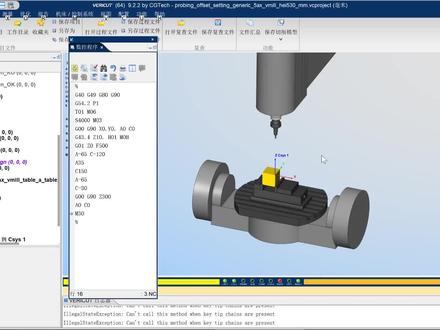 08:17查看AI文稿AI文稿
08:17查看AI文稿AI文稿大家好啊,今天给大家分享一个沃尔卡的仿真软件的一个知识点,关于我们这个刀尖跟随运动的一个仿真的啊啊,有朋友说他这个加载了这个法兰克的控制器以后呢,就没法做这个啊,刀尖跟随这个仿真了啊,要么就是 程序报警,要么就是这个啊,他乱跑,反正的话就模拟不起来啊。那么今天的话我就给大家解决一下这个问题啊,当前的话我使用的就是法兰克的控制器,然后呢我先给大家看一下这个效果啊,先重置一下,然后呢我们走一下 啊,先看一下啊,这是我们的开启了刀尖跟随功能啊啊,他的一个效果,我们刀尖始终保持在啊,保持在这个 x 顶歪顶嘴顶的位置的啊,好,我们先看一下这个程序段,我们先看一下这个程序是怎么编的啊?首先第一段啊,这是我们常规的 开头指定哈,就不用讲了。然后第二个 g 五四点二 p 幺啊,这个比较重要,如果说你在这个啊里面要实现这个模拟的话,你必须把这个段来加进去啊,就是 g 五四点二 p 幺,这什么意思啊?就是 要开启我们动态坐标去偏执啊,一定要加上去就是吊用啊。然后呢我们后面是 p, 后面给的是一个计算器号, 你这里话是 p 幺的话,那么你在这个外开的仿真里面呢,你在这个地方工作片子里面一定把这个计算器啊,也给他改成一啊,这样把它才可以对应起来,才能够调用啊。 好,这个程序段一旦加上去啊,现在就看第三个程序啊,这个是半刀指定哈,就不说了,第四个啊,是转速。第五个呢,什么呢? x 零和 y 零吗?就是 x v i 组、 a 组和 c 组哈,先给他归零,然后呢这个下 算就是接四三点四,然后 z 一是 h 零幺啊,这个比较重要,这个就是开启我们刀尖跟随的一个指令啊,接四三点四,然后呢第二用一号到的一个啊,道具长度不长。 好,我们下一段是什么?定位到我们的机灵幺,定位到我们的 z 零的位置,那在刀尖到这个段的时候呢,我们刀尖就已经是在我们 x 零 y 零 z 零的一个刀尖点的位置了啊,你说他们刀尖点的话就已经是在 x 零的位置了,那么接下来的话,我们就要执行这个 a 组和 c 组的一个旋转, 我们现在看一下这个开启了以后呢,我执行这个 a 负着六十五度, c 一百二十度啊,他是怎么运动的?我们把这个程序给他重置一下,然后那么走单段哈,看一下啊,这是我们的这一段程序啊, z 十的位置,然后呢,接下来我们走近零幺, 我们看一下这个到定点,你看他就已经是在这个 x 零玩领人的位置了,接下来我们把这个下一段程序给他执行哈,我们看一下他怎么运动的啊,你看 那这个我们在这个执行这个 a 负的六十五度, c 一百二十度的时候呢,我们这个刀尖点呢,他始终是停留在我们这个坐标系 这个 x 零五二零 zz 的位置的啊,他是没有变的啊,虽然说你赚了吗?赚了以后呢,但是我刀剑点,你看我的刀剑点的中心位置还是在这个坐标的位置的啊,也就说他还是在这个正方体的这个尖点的位置,对吧?他没有变, 那虽然说我们这里面给的是 a 度指定啊,一个 c 度指定只给了两个坐标足啊,两个坐标足的一个运动量,但是在机床里面真正他 运动的时候呢,他是五个轴在这运动的,他除了这个 ac 轴要动,以后呢,他三个线性轴, ax 轴、歪轴、 z 轴啊,都会动,他才可能啊,让这个倒地点啊,一直在这个 x 顶歪顶的位置,对不对? 这就是我们开启了刀尖啊,根据功能以后呢,他就可以自动的跟我们补正,让我们刀尖啊始终是保持在 x 零五二零、 z 零的位置的啊, 因为说如果说你这个不带 rtc 功能的话,你一旦这个发生旋转以后呢,这个刀尖脸啊,因为他没有跟随功能,他就会脱离这个原始的这个刀尖脸的位置,这个时候呢,你就需要机场去手动去补证他,对吧?要么你去后厨里面去给他补证 才可以保持啊,让这个坐标点呢一直在我们的 x 零五二零的位置。所以说不带 rtcb 功能的话, 那你至少要运行这段程序的话,你要从这个原始的这个刚刚上一段这个位置运行到这个下一段位置的时候呢,你必须要给出五个轴的坐标啊,这里面有 a 轴,有 c 轴,还要给出 xyz 的一个偏增,他这个偏量 也是真正坐标也要给出来,这样的话才能够实现这样的功能。所以说这话我们这个刀尖跟随功能开启以后,他的一个特点就是什么?他可以省代吗?啊?我像这样的话,你看,我只需要给出 ac 九的一个他这个旋转量, 那么 xyz 我根本不需要,但是他执行这个指令的时候呢,他是执行的是一个五轴五联动的一个程序,如果说你不带二 tcp 的话,你必须要把 xyz 给他加上去啊,所以说这就是他的一个特点,那么我开启了这个二 tcp 功能的话,我程序代码都会少很多,那么我程序代码 少了以后呢?那么对我的机场整个啊,给他跑起来一个流畅度肯定会好一点,对不对?这也是我们的刀尖跟随功能一个特点啊,他会损我们的代码。好,接下来我们看下一段哈,下一段你看下一段话,我们只给了一个 a 三十五,那么你看他在走这个 a 三十五的时候呢, 我们再看一下,我们给他返回一下,我们看一下这段程序啊,他是走的是多少个出在运动啊?好,我们看在这里啊,在这里时候我们摆正看一下, 哎,他这个的话,他是只走了多少个轴来我们的 a 组可能是要动的吗?因为给了 a 三十五, a 组会动,那么这个 x 轴方向他好像是没有动的啊, x 方向没有动,然后呢?我们这个 y 组和 z 组这个线性轴,他要补偿,对不对?他,所以说相当于说他是一个 啊,五轴在三连动,对不对?我们 x 轴不会动,那么 y 和 z 组的限定轴还有我们的 a 轴在动啊,这三个限制轴,这三个轴在动啊,就 a 轴, y 轴还有我们 z 轴在动,对不对?他也可以说我们只给一个 a 轴的话,他实际上是三轴在联动啊。好,接下来我们看一下这个 有没有 c 一百五十度啊?你看 c 的话,你看他就是这个,也相当于是在这个五轴四联动啊,除了我们的 a 轴没动,我们的剩下了四个坐标轴哈,比如说我们的这个 c 轴 xyz 哈,都在动啊,都在动,所以说他是一个五轴四联动啊,在执行这个指令。 好,后面的话都是一个道理啊,后面的都是一样的啊,都是这样的道理啊,反正的话就说,虽然说我给了一个一个呃,线性轴啊,一个坐标轴嘛,一个旋转轴,一个坐标,但是的话他执行呢, 有可能是五轴四联动,也可能是五轴五联动的一个程序。好,我们给他重置一下。这个话其实话也讲偏了,主要话我们主要是讲这个,这两个指令我们给他加进去啊,加到什么位置的啊?顺便再给他讲一下这个 rtcp 他这个功能原理吧。啊,其实在国内的话,用法兰克系统的话,这个是很少开通这个 rtc 功能的啊,因为你要开通这个 rtcp 功能的话,你必须要涉及到五轴五联动,但是国内技能的话啊,法兰克系统的话是很少开通这个功能的。好像是,好像是被限制了, 好像我们家装的转台的话,基本上都只能是五轴四联动啊,不能够五轴五联动,所以说他不带这个 rtcb 功能啊,那么你不带这个,你只能五轴四联动的话,基本上就不能做一些联动的产品,对吧?你只能拿一个来做这个三加二禁毒产品啊,就比较受限制,但是 国产的一些五折品牌的话,他喜欢用这个新代的系统,那个新代系统的话,他就跟这个法兰克的系统代码基本上是差不多的啊,所以他的用法的话就跟这个法兰克是一模一样的啊。啊,如果说你是使用的新代系统的话,你也可以参考这种方式啊。 好,那么这就是我们今天要讲的那种话,主要是这两个指定啊,大家要把加上去,一个是 g 五四点二 pl, 还有个是 g 四三点四啊,这两个指定要加上去, 然后呢在我们的计算器里面一样,一定要把这个这里面的号给它改成一模一样的啊,这样的话你在这个我要看到仿真软件里面才能够模拟成功。好,这就是我们今天要分享的内容,感谢大家观看啊!再见! 店铺有优基设计建模全套课程、优基三轴数控编程全套课程,关注我学习更多优基知识。
197UG三维工作室 01:53查看AI文稿AI文稿
01:53查看AI文稿AI文稿大家好,这个视频来讲一下在边看到进行仿真的过程中,机灵灵的走到路线如何设置成沿直线走到,或者说设置成沿折线走到,那首先我们看这样的一个 仿真程序,那么这个刀轨呢?我们在 g 零零虚线快速移动的时候,每次抬刀之后,他并不是沿着这个直线移动过的,而是沿着折线先走四十五度,然后再去走一个沿着 l 方向的直线到达这个点, 然后走完之后到下一道也是一样,那么他走走这个快速移动机灵的时候呢,首先是先走四十五度的斜线,然后再走一段直线,那么在真正机床呢,实际上是跟我们机床的插入设 有关,我们去可以改善的时候去修改过来,那么在我们这个弯道的里面,我们如何去修改他,那么当前呢是这样走直线的形式,那么要想去把它修改这种走机灵的方式,我们需要在机床控制系统这个里边点开机床设定, 那我们先把这个刀轨先退出来单击机枪设定,然后呢去单击轴优先,然后我们需要让他沿直线,轴呢就把这个 x y、 j 这个轴呢去把它选中,然后应用确定, 那么这个时候我们再复位一下,再去走一下,我们再来看一下道具轨迹,这个时候我们看他这个直线呢,就是 是走完一刀之后,这段的末点抬刀到下一刀的这个起点,那么他就会沿着直线去走,那么这个就走的不是折线。好,这个设计,呃设置技巧呢?我们。
36智能制造798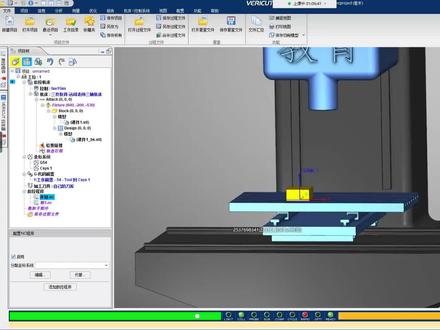 06:34查看AI文稿AI文稿
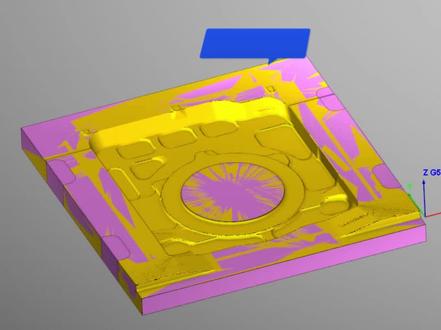
06:34查看AI文稿AI文稿急用的话就是用不用他仿真啊。 然后他第一层是什么?看他 vt 就是报警啊。这个应该是呃撞刀了啊。看一下是什么原因 哦。大家看一下我们这个毛盔的问题对吧。因为什么 我们刚才仿真的时候啊,用的是什么?用的是我们的包容块对吧。这个包容块是我们在呃坐标系里面去设置好的。就说吧。 ctrl 加 b 啊,把它隐藏下,重新倒一个。 你看这 vt 啊,就是厉害对吧。你要一丝瑕疵啊,都不行,俺家康帅家上再重新倒一下 他的准确率啊。你这个零件过泄一个丝,他也能仿真出来。 以后你们去做模具对吧。这个模具。可能这个模具的材料是国外进口的对吧。结果你把它整报废了啊。那也不可原谅啊。 这删掉啊。这个是毛坯, 刚才我看一下这个。这个。这个应该是我们的部件啊。好,重置一下 看。你看他,他只要撞刀对吧。刚才我们现在刚才我们那个是毛胚厚了,他第一刀撞刀了,那出现什么?变红了,直接就停下来了对吧。然后然后在危机这里面有很多报警。 用尽量模拟出来吗?肯定模拟不出来啊对吧。大家看一下。觉得这个软件他用处很大对吧。我们现在以后与其以后我们去掏钱去学,还不如现在在我们直播间报名去送给你这个教程对吧。大家可以直接联系我们老师啊,进行直播间报名啊 对吧。你与其以后用的话去掏钱,还不如在直播间报名给你送啊。一样的。还等于说是免费把这个人把这个人给学了啊。这个拉快点啊。 对啊,这个软件给大家说下,这个软件在我们现在内部的学费的话,如果说你在我们内部,你现在单独报名学一个 vt 对吧?一千啊,一千一千八,一千八百五 对吧。那你掏呗,没有办法的。但是现在在直播间报名我们学游击啊,因为我们老师就考虑到大家以后用到这个就直接给你送了 对吧。这个是我们切完的一个状态,然后呢,我们现在可以去点这个分析啊,自动比较对吧。他是看一下,因为我们这个刀具切削零件无非就是两种结果 对吧,一个是过期,一个是刚好啊,刚好加工完成,一个是残留对吧。他这边啊过期残留都有。那我们现在先分析一下过期啊,看一下,然后这些小红点是什么? 这个我们把这个过期啊,就是他的过滤器给零的话,这个是我们模型的误差啊,因为从 vt 我们倒的时候我刚才没有 改的公叉,这个是魔性广场,我可以把它改成啊,这个零点零一是什么?就是这个过切检测低于一个丝,他就不会包我们显示出来 对吧,这个是大于五个四的,这个都是我们的,一个一个毛,一个一个什么啊,这样子啊, 就我们把它我们倒的时候啊,你把这个咸公叉啊,跟这个角度公叉都要改小啊,你改大了之后啊,即便是你刀落没没有过切,你的模型有误差,他这个也会有这个过些爆油性的啊, 其实我们需要呃明白的,你别说刀了,没问题。 vc 怎么仿真过些呢啊,然后这个残留我们看一下过些行残留看下残留 对吧。这是我们的一个残留,来一个零点零点零点。哎,零点一啊,对吧,为什么会有这个残留啊, 看一下我们这个参数就知道了。因为刚才为了演示我们这个道路,为了保证我们这个计算速度,我的布局给的很大,给了一毫米对吧?我们这个球到你给一毫米,没洗干净吗?肯定是有残留的。你看 vt 也仿真出来了对吧,这就是他的厉害之处 啊。过切残留,包括你这个机床撞到,然后大家以后去厂里上班,我们也有教程去教你如何去建造一个自己厂里的 机床对吧。我现在欠了一个我们三角交易的机床啊。这个以后大家都可以去建自己的机,自己的机床啊。这个是 vt 就接到这。呃。然后嗯,我再打开一下啊,给大家看一下他的五轴仿真啊。因为他基本上是啊,什么车床啊,三轴,四轴,五轴都可以仿真的。我打开一个给大家看一下我们呃五轴课程中的一个仿真吧。 对啊,想要学习我们这些软件的啊, 想要学习我们这些软件的就加我们老师微信 ug 五七零零啊,这绝对是超高的性价比是吧。我在这里把这个软件夸夸一万遍,还不如把这个道路啊,把这个仿真给大家去演示一下他有什么作用 对吧,真正的去看个明白啊。我打开一个我们五轴道路,这个是我们上多轴课程,就是现在大家去外面报名的话,去学一个五,学一个五轴的话,单独去学也得 四五千吧,对吧。现在我们在直播间报名的话,给大家是包分配的。就是,呃,你在我们这把课程学完之后,然后我们是包就业的。
 02:25查看AI文稿AI文稿
02:25查看AI文稿AI文稿大家好,这一期我们讲一下 ug 的 ude 试驾的安装使用方法。首先我们打开一个后处理文件, 这个后处理文件一定要有这个 c、 d、 l 的后缀的文件,如果没有这个 c、 d、 l 的文件,说明你的后处理不支持 u d、 e 试驾。 好,首先我们右键打开这个 c、 d、 l 文件的看一下,好,第一个这个东西不要动,这个东西如果你删了以后,你的 u g、 u d、 e 会出现问题, 我们看下面这一段,这一段代码它是一个 u d、 e 事件,然后下边这又是一个 u d、 e 事件,所以我们要把 把第一个 u b、 e 事件整个儿复制下来,复制把它粘贴到 你的 u g 所在位置。二零零七 mac h 这个,然后找到这个 u s、 e、 r 这个有一个 u d、 e 点儿 c、 l 文件,右键打开它。 好,这个时候我们把它放在第一个位置粘贴, 粘贴好了以后点击保存,这样以后我们重启一下 ug 初期,我们随便 啊打开一个刀路, 好,我们往下找,找到机床控制,开始导轨事件,点击这个小扳手编辑好,这个时候我们就在用户定义事件里面可以看到我们刚才加载的这个 ude 事件,这个时候我们就可以根据自己的参数填写, 可以看到二三点零已经生效。
100UG_vericut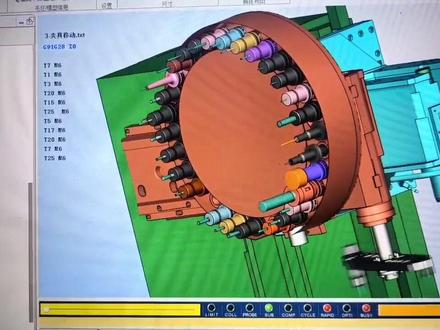 00:38
00:38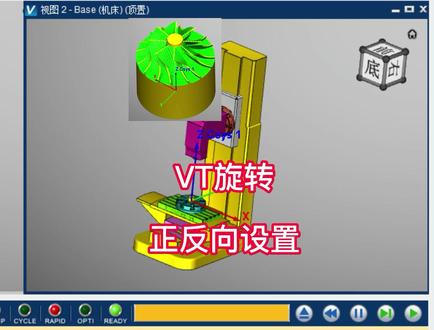 02:47查看AI文稿AI文稿
02:47查看AI文稿AI文稿朋友们好,我是重庆居家勇哥啊,有朋友说 v t 里面的这个旋转正反向怎么去设置,搞了好久也没弄明白, 其实技术这东西就是一身纸,其实一说的话就是那几秒钟一分钟的事情,如果自己去摸索的话, 找不到位置,是吧?搞个几个小时,可能说搞个一两天都没弄明白,然后我这里就录制一个视频,做一个讲解吧。首先你打开你的微信里面进入这些参数设置以后,是吧?我们现在就看一下手工输入,点击到项目里面,我们来看一下 b 轴, 好,我们这里十度,是吧?这是一个旋转的一个方向,是第一轴的旋转的一个方向,然后这是往负方向旋转。好, 我们来看一下 c 轴, c 轴也是的,是吧?我们点击一下。旋转正方向的时候朝右边顺时针。好,这个时候我们要想把它改反向,怎么去改? 改反向的时候点一下复位,好,点反向的时候我们点一下这个显示机床组件进来之后我们找到我们的 b 轴,是吧? b 轴找到,我们往下拉,拉了以后,这里有一个绕运动轴,绕歪轴旋转,这里有个反向,我们把这个勾打上,然后他就反了。 好,我们再来选择一下 b 走,然后我们点加正,是不是这个时候是不是就反过来了,跟刚才的不一样了? 好,我们再来点击一下 c 轴,好,这里点下 c 轴,然后我们点击 c, 然后我们点击一下反 向,然后这里点一下反向的时候,正向的时候他就是一个逆时针的一个旋转的,我们来看一下是不是这样的,点击下 c, 放大一下,然后我们点击一下,是不是现在就是逆时针的一个旋转,就是反向?刚开始我们是点击的是顺时针,我们再来测试一下, 把这个关闭掉,然后我们点击一下运动仿真,点击一下 c 轴,点一下正,是不是这个就是顺时针了?所以说反向就在这里设置 啊。这是一个单转单摆的一个测试,我们可以做一个,做一个模拟仿真,嗯,进行一个模拟,这是一个叶轮的一个仿真测试,点击下运行, 嗯,就是单转单百 b c 结构放大一点,速度放快一点。
 01:42查看AI文稿AI文稿
01:42查看AI文稿AI文稿大家好,我是远峰,今天我们来讲一下我们使用 vt, 然后如果说你的机床没有刀库的话,是怎么设置的,对吧?我们先看一下,就这个机床我们这个模型 设置啊,他是没有刀库的,大家可以看这个程序啊,我们的防御程序的话,是只有一个刀号,也没有换刀的一个程序。好,我们来看一下,做个仿真 看,对吧?一倒下去这个就撞了,那这个我们该怎么去设置啊?在 vt 里面我们该怎么设置?首先的话,如果说我们这个 机床是无刀库的话,我们把这个加工刀具啊,双击一下,就是你要把这个刀具名称给他去给,好,就是你不能说你刀具名称给的是第二式的刀,对吧?那实际上你的直径是十五,那就不行,对吧?信息 正确,这是第一步啊,然后第二步呢?我们点击这个通过列表换刀啊,我是通过这个指派数控程序的这个刀具,看一下啊,通过这个指派数控程序,比如说我七号程序是十七二零三八,对吧?八号,八号程序的话是八二零,那我就是给他这样进行单独的指派, 就是第二个一个设置,第三个就是非常重要的就是如何解决,对吧?我都设置好了,他一刀下去啊,很壮了。好,我跟大家来说啊, 就是很简单,我们大家点开,这里有一个工位,对吧?这上面有一个鸡代码,你把这个鸡代码啊,他本来是刀长补长,我们这个没有刀库吗?你改刀尖就行了,只需要改这一个就行了,我们把它再重置下,这个时候他就可以用了啊。 哎呀,现在开始仿真了。好,今天一个视频内容就讲到这,感谢大家收看,再见。












猜你喜欢
最新视频
- 1073青玄19