
粉丝2816获赞6391
相关视频
 24:06
24:06 01:00查看AI文稿AI文稿
01:00查看AI文稿AI文稿啊,这个时候呢,我们需要把我们的模型与这个零件坐标系对齐啊,首先我们现在确认的是啊,我们的零件坐标系已经创建好了,而且符合我们的要求啊,然后这时候我们导入我们的模型。 啊,那我们看到啊,这是我们的模型,模型的坐标原点呢,也是我们刚才已经看过他的位置啊,我们只需要一步操作就可以将模型与我们的零件坐标系对齐。模型对齐,那有些朋友他在对齐的时候发现跟他预想的效果不一样,那可能是什么原因呢?可能是啊,比如说我这条线的方向我做成了歪轴, 然后我的坐标系跟我模型的坐标系有九十度的一个夹角,那你再再次给模型对齐的时候啊,那模型会跟着我的坐标系一起转,但是我的零件啊,位置跟我模型的位置就是不一样的啊,这就是为什么你的坐标系对不起你的坐标系对不起的原因是你的零件坐标系和你的模型坐标系没有得到统一, 所以你的模型是对不起的,只要你使用了正确的一个坐标系啊,那我们在点模型对齐的时候,他是能够将我们测量的元素跟我们模型上对应的特征啊吻合的。
127SEREIN思瑞FXH 00:48查看AI文稿AI文稿
00:48查看AI文稿AI文稿大家好,今天我们讲一下三二一,建立我们一个坐标系,同时将我们的模型与我们所创建的坐标系进行对齐。 首先啊,在进行测量之前,我们需要观察我们的模型坐标系的位置与我们二 d 图纸的位置所要求的是否一致。如果我们二 d 图纸要求的位置与我们这个坐标系的位置与方向一致啊,那我们就按照模型坐标系的位置与方向去建立连接坐标系。 我们阿迪坐标系要求的位置啊,是在基准圆心,而不是在坐标原点的话,如果是这样的话,我们需要模型坐标系移动到圆心之中。 今天呢,我们以我们的模型坐标系的位置在这个角落上啊,在我们的基本脚上啊为例啊,我们来讲解一下如何在微生的灵密寺中创建一个啊相同的坐标系,并且将模型对齐到我们的零件坐标系上。
231SEREIN思瑞FXH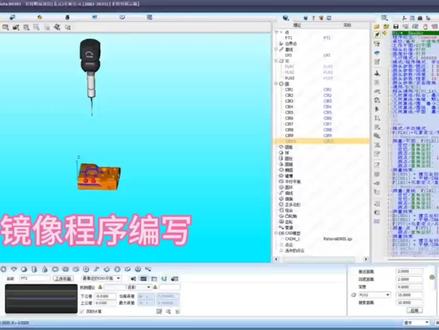 02:39
02:39 00:59查看AI文稿AI文稿
00:59查看AI文稿AI文稿今天给大家演示一下如何快速的输出要素特性值,如原的坐标值和直径。在获得目标要素后,切换界面道输出窗口。首先在设置中进行元素设置,设置要输出的要素内容, 例如冤我需要输出 xy 做标志和直径,原追输出坐标指和追角。设置完成后,拖放要输出的目标元素到报告窗口 脱放,完成后保存数据报告。
126SEREIN思瑞FXH 00:59查看AI文稿AI文稿
00:59查看AI文稿AI文稿首先我们需要点开我们的坐标系碰口,然后脱放我们测量到的平面一的实测值,来设定我的微正方向,脱放我的直线一的方向啊,设定为我的 x 正方向,同时啊脱放我的点一作为 x 的圆点, 那这里我们看到本元素的微值啊,后面是零,也就是说我平面一啊,在这个坐标系里面他的低值是零,那如果我需要把坐标系向上平移,我可以给他输入一个十啊,我们点击预览,我们看到这个坐标系就会 啊平移到平面下方,输入副石啊,这样上下平移就可以实现啊,我们的坐标系预览就会挪到我们的平面上方啊,同样的我们的歪值是一样的,那我们这里要求的是平面移的 一直等于零,那我们这里可以零就好啊,那我们是两个方向三个圆点设定完成啊,预览啊,达到我们的要求,点击添加激活啊,点完添加激活,我们在我们的坐标系列表中可以看到我们的 c ip 一。
341SEREIN思瑞FXH 00:44查看AI文稿AI文稿
00:44查看AI文稿AI文稿welcome mes 中如何实现 cad 坐标系转换?首先我们导入格式为 ig 的三 d 模型,模型导入后,我们看到坐标系原点在中心原位置,我们将坐标系原点移至左下角位置。 手机特征框中的模型文件选择设置模型默认坐标系,点击左上角图标选择输出 cad 格式为 ig, 选择存档路径导出元素框中勾选 c ad 模型, 点击新建,将我们刚刚导出的 cad 模型重新导入。这时候可以看到 cad 模型上的坐标系已经移至左下角,你学会了吗?
301苏州思瑞测量技术有限公司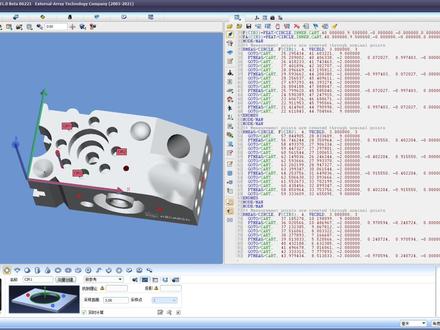 05:02查看AI文稿AI文稿
05:02查看AI文稿AI文稿大家好,今天我们来讲一下如何使用瑞士诺迪尼斯的三点离合建立坐标系, 这里的三点离合跟 pct miss 的三元迭代是同一种方法,那我们首先可以通过这个帮助文件来阅读一下他的基本的一些 啊,就是我们按钮啊,或者是一些窗口,他的命名,这个大家可以自己了解一下,然后 我们开始去讲解啊,现在开始讲解讲解如何使用三元离合。那三元离合的话,我们首先啊是要进行一个项链状件, 他一次把这个实际弓箭上的三个圆和我们模型上的三个圆进行一个叠弹计算,那因为我们弓箭摆放的话跟我们机床是有夹角的, 实际上是一定有假角的,所以我们要使用项链创建,那我们首先要进行项链创建的一个参数设置,设置好这个圆所取点的一个数量,包括他的一个啊采样点的一个个数。 把这些设定好以后啊我们再进行一个元素的采呃设定和采集, 那我们通常就是说先根据我们图纸的要求啊,取到三个基准孔啊,我们先使用线形定义,在模型上 取得三个啊寄生孔的位置,那我们取得的时候,我们右边这个窗口是使用手动模式,一般我们采样的时候使用手动模式,那我们采样的时候是要产生项链创建的一个点, 先把它编写到程序中,那产生项链创建的点的话,我们的软件会默认将其改成啊,改成这个 自动模式,那我们需要人工的把它切回手动模式,这些定位点我们是不需要走的,第一遍的话,我们需要手工裁点,定位点我们先不用去 创建啊,那通常的话用三元迭代,我们可以通过啊,一次迭代就能叠准啊,因为 啊一般使用孔做基准的话都是比较准的啊,那我们啊把这些设定好以后,我们就运行这个程序,那如果你是连击的呢?有操作手柄,按照提示去取点,那我们现在是使用拖机模式来模拟, 模拟的话我们就使用鼠标的左键代替你的手柄。那我们首先是在圆的端面上取了三个点,这三个点可以确定这个圆的一个 啊投影方向,那我们在取这三个元的时候,我们要求这三个元他所投影的方向必须是一样的,也就是说三个元的理论方向,理论投影方向是一致的,那我们取完原一之后,我们可以看到他的他拥有 一个实测值啊,实测值那我们在模型上是有理论值的,那我们如果用机器直接去打的话,我们会得到一个他的机床坐标系下的一个值啊, 那最终呢,他就会使用这三组啊模型上的参数和三组机床上的参数进行一个迭代计算。 那具体他是怎么算的呢?我们用户的话是不用去了解太多的啊,他是一个非常复杂的一个数学模型,那我们要掌握的就是我们要踩好这些点啊, 啊,每个元上面我们都要去踩一样力点,那如果你没有事先编辑好程序的话,那我们就需要每次测量这个元素时,将这个元素的名称输到我们这个名称窗口啊,输到我们这个名称 窗口,输到名称窗口之后,选择限量创建,然后去去取点,这样也是可以的啊,那我们取完要素之后,取完要素之后直接打开我们的三点离合,将三个元拖到元素一,元素二,元素三, 然后如果你需要平均误差,将平均误差勾上啊,如果说你啊不需要平均误差,他有默认的一个三二一的顺序啊,添加激活坐标系,再将模型跟这个坐标系对齐啊,让我们的一个 三点离合的坐标系就完成了。这里我们啊一定要强调的就是元素的创建要使用三点离合,嗯,使用项链创建啊,项链创建,也就是说我们 cd 元素选择之后一定要用项链创建去取他的实际。
369SEREIN思瑞FXH 00:57查看AI文稿AI文稿
00:57查看AI文稿AI文稿首先我们需要将工业摆放在机床上,然后按照我们图纸的要求,使用我们的测量窗口,测得我们的平面 直线和基准点啊,得到我们对应的平面直线和点。这是我们弓箭摆放假设,这是我们弓箭啊,摆放在机床里面的位置啊,这就是我们弓箭摆放在机床里面的位置。这是我们的基准面,这是我们的基准边,这里是我们的基准点。 那这是我金黄坐标系的位置。我们当前的平面坐标 a 是负的两百啊,直线的坐标 y 是两百, z 是啊,负的两百五, x 是两,然后点的 x 是一百。那我现在需要啊,建成我们的目标坐标系,就是要求点的 x 是等于零的,线的 y 值是等于零的, 面的 z 值是在一点的。而且方向是要求平面一的,法相为 a 正方向,直线一的方向为 x 正方向啊。满足这些条件啊,我们就可以建立一个跟我们刚才在模型上见到的啊,位置相同的一个坐标系。那应该如何操作呢?
102SEREIN思瑞FXH 01:08查看AI文稿AI文稿
01:08查看AI文稿AI文稿hey girl let go let go。
 02:05查看AI文稿AI文稿
02:05查看AI文稿AI文稿大家好,今天给大家介绍我们这个 resident 的 miss 二,呃,插入坐标系的一个功能 啊,首先我们在这个右的坐便器下,我们测量了啊九个孔,那这九个孔是啊,有八个孔围绕着中间圆啊,这样一个分布。 那我们在输出报告的时候发现啊,我们使用当前这个 crde 来输出的话啊,是没有办法按照你 原一为坐标原点啊,输出另外八个孔的及坐标的,那我们可以通过插入坐标系的功能来实现这个功能,我们的坐标系可以插入在原一和原二之间,也可以插入到原九的后面,然后我们再去写输出命令就可以了, 那这里我们演示一下,我们将这个坐标系插入到原一的后面,那首先我们鼠标点在这个原一这个位置啊,然后点击坐标系的平移,我们将坐标系平移到原一的圆心啊,那这里弹出一个提示啊,我们点击试 点击式以后呢,我们的其余的八个元啊,他和元一的相对关系就不会发生任何改变, 然后我们的程序啊,他还可以继续的运行啊,就是我们的测量轨迹不会发生改变 啊,然后我们的数据关系呢,就已经转移到了我们的 crd 二里面,我们可以看到这个用几进几角去输出的话呢,就已经可以啊准确的输出它的一个结果了 啊,我们看到这个结果里面,他使用的是啊我们的极径和极角,八个圆极径和极角,而且理论值都是正确的, 那我们的轨迹同样是不受到影响的,我们这里可以测试一下啊,就是我们测量一下,可以看到他可以准确的打到后面的这些圆。
 06:45
06:45 04:03
04:03







猜你喜欢
最新视频
- 473💤