发那科机器人原点文件怎么导入

粉丝2.2万获赞3.5万
相关视频
 13:52
13:52 00:48
00:48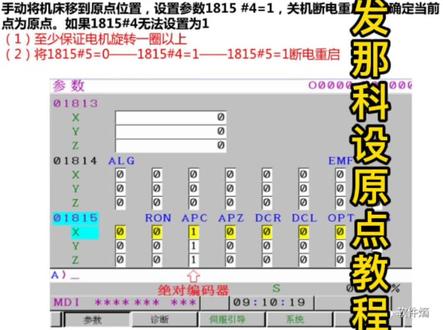 01:01查看AI文稿AI文稿
01:01查看AI文稿AI文稿我相信很多人都遇到过这样一个问题,发那颗电池没电的时候要重新设远点,但是换了电池之后,参数幺八幺五的 apc 设不进去。现在教大家一个办法, 先把参数幺八幺五的 apc 设成零关机,重启开机之后,我们先移动一下歪走,我们往里面摇几个毫米,然后再把 apc 设成一,再关机。重启 开机之后,我们再试一下 apc 能不能射成一,这个时候我们看一下 apc 已经变成了一, 大家学会了吗?其实 abc 里面已写不进去,有很多种原因,这只是最常见的一种。 还有比如编码器线上没有六幅输出,或者编码器损坏,都会导致一射不进去。另外还有几种情况,我们评论区讨论一下。
1598苏州大头机床 02:42查看AI文稿AI文稿
02:42查看AI文稿AI文稿发那颗机器人程序编写,一从开始用度一注二度三分别控制几个气缸。二从开始到结尾用 di 一 到 di 四也检测信号。三要求 di 二和 di 四总是保持有信号, 按有 n 多任务并行执行指令。根据视频要求,机器人在加取保温杯走后,同时传送带启动保温杯上料, 这就用到 r e n 指令,它是用于实现多任务并行执行的指令,是叫器画面程序,是机器人运行的主程序,手动单步运行一遍。 我们知道第八行需要插入 i u n 的 控制程序,点 m e n o 键零下一页在第二联我们看到四多轴控制,点击进入运行,需要选择同时运行的程序,选择商利奥的程序 进入 i u n 多轴控制的程序。我们就是先把最前面的气缸度三关掉,让保温杯传送到最前面,等待保温杯经过 d i 三的传感器,气缸度三立马打开 对应最前面的气缸度一,关掉第二个气缸度二,打开 保温杯,经过第一个感应器,立马注已打开这两关掉实时监控。二一和 i 二需要用到后台逻辑,如视频显示后台程序。第三个光电开关感应到杯子,就把二一负为一, 第四个光电开关感应到杯子二,二负为一, 第二个光电开关感应到杯子 r 二清零运行该后台回到主程序,需要模拟仿真打开机器人多程序可并行运行,当条件不满足则汇报 报多轴控制的程序异常。今天我们利用势利学习了 iune 多轴控制指令,你学会了吗?赶紧试试。谢谢大家观看,下期再见!
59机器人工程师 01:58查看AI文稿AI文稿
01:58查看AI文稿AI文稿大家好,好久没有跟大家录视频了啊,那这一期呢,我跟大家来讲一个我们 i o 里面的一个标记位,我们点击 i o, 找到我们的类型,我们可以看到这边有一个标记, 当然了,很多小伙伴找不到这个标记,那是因为我们有一个变量需要更改一下,找到菜单下页系统变量在我们的第四百二十八行的这个变量 点进去,把这第二个勾选为就好,勾选完成之后呢,我们就可以考看到我们这边有一个标记位,那标记位是啥意思呢?标记位是当我们几种条件同时满足的时候, 比如我们 d o 十 and d o 十一,我们 m 八的这个标记位才会为二。好,那我们把它改成 m 七, 那 m 七我们来监控一下,找到我们的 i o 类型, m 七现在没有为 on, 当然我们把这个 d o 十和 d o 十一置起来,兄弟们可以看到啊,它还没有为 on, 那 是因为为什么呢?这个标记位必须要首次必须要手动运行一下, shift 加 forward 运行一下,运行完成之后呢,点击 i o, 我 们就可以看到我们这个 m 七的标志位,标记位就为 on 了, 这个只需要手动运行一次,当你关闭掉 d o 某一个条件输出的时候,它 m 七的标记位就会自动为 off。 好 的,感谢兄弟们观看,希望兄弟们点赞加关注,谢谢。
 01:40查看AI文稿AI文稿
01:40查看AI文稿AI文稿今天给大家录制一个法拉克三轴远点丢失,怎么设定远点?我现在在客户现场教我们这几位小师傅设置一下机械的参考远点。 我们很多客户呢都反映这个机械圆点定义, 他总是输进去之后,他的原点设置不了,我们幺八幺五点四在这里设置我们的机械原点,我们机床现在已经删除,移到了我们机械的原点,现在我们就定义他的原点。 首先我们把幺八幺五点四都设为一,打到 m d i 模式 输入进去,这样我们原点就定义完成。下面是一部很重要的位,很重要的操作,很多人说原点设置完之后,他关机再开之后又变回零,这是为什么呢?走下面看我来操作。 我们首先把机床电源关掉,最重要的一步,把机床后面的总电源一定要关掉, 后面总店员关掉之后我们再重新启动,只有总店员关了之后再重启,这样的话他里面参数才能被重新定义,我们的机械原点也就设置完成了。
162金重CNC加工中心 02:13查看AI文稿AI文稿
02:13查看AI文稿AI文稿发那颗机器人快速回零点,第一种方法呢?我们按试焦器上面的 pos 按键,然后这边就会显示各个轴的角度,我们用关节手摇个机器人的各个轴, 然后就可以清楚的看到每个轴它的数据,然后把每个轴调为零度, 然后这样就可以把机器人调回零点了,在真实机器人上也有零刻度线对齐以后,对应这上面的也基本上是数值为零, 不过这个方法有点慢,我们再来讲第二个方法,我们随便点进一个程序,我添加一个运动指令,最好是关节,然后我们把光标移到编号位置的地方, 点击位置位,然后再点击形式切换到关节,然后这边也是可以看到各个轴的数据,我们直接把各个轴输到零点, 然后五轴这边我是选择负九十度为原点位置,然后点完成,然后我们再来运行一下程序, 这样机器人就快速回零点了。我们我们也可以用位置计算器的方法一样,我们添加一条指令,然后我们把光标移到编号这里,点击选择,点击 pr, 然后我们选择第十个位置计算器, 然后我们点击 data, 然后切换到位置计算器,找到第十个,然后点击位置, 然后形式切换为关节,然后点继续,然后这边就是也可以调整他的数据,我们把每个轴输入一下零零零零,然后负九十 零,然后调整完了,我们点完成,然后这个时候我们再回到程序里,然后我们再运行一下程序,好,这样就可以了。













猜你喜欢
最新视频
- 1.4万漫威超级粉