安川机器人焊接文件号怎么修改
翁公,翁公,如何更改程序文件夹名称?我们进入程序,先点击选择程序,然后点击程序,然后有一个文件夹更改, 我们进去,然后这是他的文件夹,我们找到六六文件夹,这是他的文件夹名字六六,我们再点击程序,有个文件夹名称更改,然后把六六删掉,我们变成八十八,然后按一下回车,然后他的程序文件夹名称就更改了,然后这是他的里面的程序。

粉丝1314获赞1888
相关视频
 06:03查看AI文稿AI文稿
06:03查看AI文稿AI文稿大家好,朋友们带你们看看这个是怎么干的?这个机器人,这个是我刚才调过来的,然后开机推子右 幺八,推子右左右, 只需操作一步开始, 然后全程不用管了,防着的继续调 练, 开始调练。 这样你这样你都回喽,你按调不好,慢慢的来还是不死嘞?速度,速度,往下盖盖速度会啊,然后这个就是往西一点, 主要是我抓的这挡不住,你抓了不用那么使劲。不,我抓的他们都拿焊死那行。 然后就是位置修复,按住 a 加这个确定修改,等修改完了他直接就翻下一步了是吧?对,修改完了,就把速度改过来之后,然后按住 a 加这个开始直线前进, 左右的一步,右一步,接着出师啊,因为这个师有点高啊,兄弟们。这个师有点高,就是往西啊,先把速度降下来,速度降到二之后抓住那个往西来,不能往东了,往西 然后进时你看正好吧,正好,然后就是摁着 a 位置就步,直接跟那个确定啊。对,我,我那个时候,对,然后回车,回完车之后把速度改成三,就进行下一步了,下一步就是摁着 a 加下,然后前进, 前进,就这就这一步啊, 然后还是那样,这一步倒行,这一步不行啊,不行不行,得往往下来点,再好点。往下来点是吧?往西一点, 往西一点,赶速度 扎就行了,就一点就行,扎就行,不用往这根啊,也不能太轻了,你扎就白扎,扎就行,你试试这个力度,就跟一个二十八的一个弹簧似的, 扁的太狠,扁的太狠。哎,你就觉得就一个很轻的一个间隙, 你不能这样做,做一个东西,你不能这样做,做一个东西。跳三百多步,跳完了吧?跳完了这步,跳完了就下一步,下一步是第九十步啊 你。你速度慢,所以说他不走,慢着点,别让他调头。行,你的速度调成三,调点的时候最低的是三啊,前进。对,你改下去了吗?改下去了。改下去就前进啊, 你看着点,你教给他怎么练,你看他就是老师,你看就是大师级别。我现在咋弄明白我日 那个没?没,那个药哪个有?没出完气没?没,咱那个药不用管,直接下一步。你给它调完了吧。现在没调完就出师啊,我这都要出师漂亮了 直接。你看你走了 速度得让他往斜,这不能动弹,厨师可以吧?可以可以,然后修整啊。我说我弄不动,我这定速度一改改成三,然后往下下一步 给捏练练吧。你俩挑点吧,我换件去了,拜拜。 无法替代最初的情怀没完活。 机子焊在猴子里,不用管哪里偏了跳哪里。 到点了,吃饭去。吃饭去了,老魏走不是有钱都让你挣去了是吧?有钱都让你挣了,连饭都不吃,我吃饭去了,拜拜 啊。谢谢,还有四个小时下班,拜拜。大活干,早点散,打球子不耽误,哈哈。
172没文化的袁哥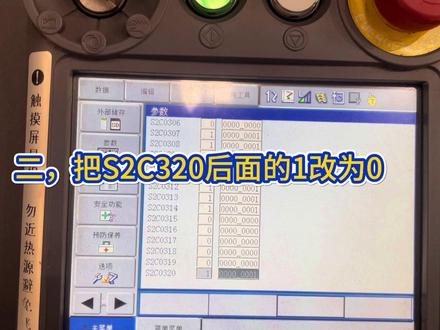 00:23查看AI文稿AI文稿
00:23查看AI文稿AI文稿下面讲一下在修改指令时,出现这个对话框时怎么取消。一、选择参数菜单,选择 s 二 c, 进入参数页面后,按选择键 跳转至三百二十二,把 s 二 c 三二零后面的一改为零,然后再返回程序内容,这样就好了。
288工业机器人4S店 00:30查看AI文稿AI文稿
00:30查看AI文稿AI文稿安全焊接机器人怎么整体修改速度?好,我们拿到试教器将它打到手动,然后我们将光标移动到程序一栏,然后程序一栏我们点击编辑, 它有一个修改速度 v z, 就是 木 z 的 速度,然后我们的木 z 一 般镂空一点,我们将它打到一百,这样能加快程序的运行,然后我们按一下回车,然后现在所有的木 z 的 指令都是一百。
 01:30查看AI文稿AI文稿
01:30查看AI文稿AI文稿今天我们学习如何处理安川机器人九千零一起胡应达异常报警解决思路。九零零幺,报警提示安川机器人起不了胡,执行不了焊接命令。根据经验,问题基本出在焊机电缆正负极纵丝上, 焊机如果有故障,一般在出现报警。九零零幺下面还会出现另一个报警焊机错误编号及错误编号的提示,或者观察焊机上面电流显示处有无异常,如出现了 e x x x 错误代码,可以通过标配的焊机 r d 三五零面板上 错误代码异常信息内容来判断故障。其中最容易出现的是焊机错误七零二,电压检测线异常,这个需着重检查机器人底座后面电缆的电压反馈线有无连接或松动。 另一种是指出现警报九零零幺,这种情况基本可以断定颂丝或正负极线的问题,可以将焊丝剪断重新起伏,看看焊丝有没有碰到弓箭,如果碰到了弓箭,就说明颂丝没问题, 只需检查焊机出来的正负极电缆是否连接或松动即可。如果不送丝,则还需要排查是送司机还是胡焊通信。胡焊机板或通信线缆的问题,送司机可以通过手动式交替操作,看看手动送丝顺不顺畅来判断,顺畅的话就是胡焊机板或机板的通信线有问题, 否则就是送司机的问题了。通信线还可以用万用表检测出来,如果确定是胡焊机板有问题,只有维修或更换来解决了。
105雄安凌飞工业机器人 03:12查看AI文稿AI文稿
03:12查看AI文稿AI文稿安全焊接机器人视角机,三十秒变成,看完学不会把手机过来,我刚才已经把机器人打开了,这是正在启动,正在加载,等会我给大家说一下。嗯,基本的一些操作, 现在我们看到的就是一个呃试教器的一个主界面,上面的是一个触屏加显示的一个界面,下面就是一个存按键,他两者是可以结合的。首先我们从左往右看一下,他上面全都是汉字, 这是一个主菜单,上面是一个显示菜单,我们先点从先看一下主菜单,比方我给大家新建一个简单的一个焊接程序,你就可以直接点 点程序内容,然后这边就有一个光标打下来,你看我现在是按键加呃触屏相配合使用,这样是效率比较高的。然后经典程序你在这里起一个名字,然后按回车,按回车就可以, 现在下来我们继续点执行,单机的话你就继续点执行,这样的话我们就新建好一个程序,然后在这里面进行一个简单的编程。比方我现在让机器人 动一下,我按一下师傅准备,然后按住后面的一个,有一个使能开关,把它握紧,往上提前简单动一下。 大家可以看一下这些比方我按这个按键,他的最下面那个就是自动, 这是机器人的第一个轴,然后这是第二个轴, 这第三个抖,然后四第四个抖,第五个抖,第六个抖,然后我们通过这些轴操作键来把机器人运动到 走到你想要的位置,比方走到这个点是你的引呼点,你就可以直接把这个点记下来, 把这个点击下来之后,我们直接给一个引呼命令,引呼命令这里都是能直接输入电流电压的,电压我们用的是一元话电压,然后包括你引回的一个时间都可以,都可以随意设置单位是秒, 然后给一个载影波,接下来我们开始走走机器人,我们比方的走一个直线的话,我们这边有插部方式,切换一个直线,然后直接系进去,再点一个西湖,西湖也可以给一个仓库, 也有自动解除粘丝的一个功能,也不方有互关的话,我们可以添加一个延时,这样一个简单的焊接程序会变好的,这就是一个最简单的一个焊接程序,就是起伏点 到了齐湖位置,接下来齐湖要开始焊接,焊接往西湖点走,然后西湖这是一个最简单焊接系统。
3068新迈驰工业机器人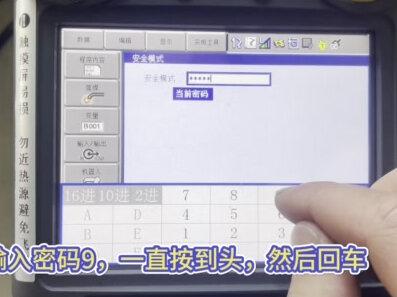 01:09查看AI文稿AI文稿
01:09查看AI文稿AI文稿下面讲一下安川机器人的四种安全模式,一、选择系统信息安全模式,选择里面的编辑模式,编辑模式没有密码,显示一把钥匙。二、选择编辑模式, 密码输入零,一直按到头,回车显示两把钥匙,说明进入编辑模式。三,选择管理模式, 输入密码。九,一直按到头,然后回车显示三把钥匙,说明进入管理模式。 四、选择安全模式,输入密码。五,一直按到头,然后回车。 三把钥匙旁边出现一个加号状,说明进入安全模式。 最后一个是一次管理模式,需要厂家给定,一般用不到这个。
182工业机器人4S店 00:44查看AI文稿AI文稿
00:44查看AI文稿AI文稿哈喽,兄弟们,你们好,我依旧是你们的小杨。我们今天讲解学习安全机器人的第一步。呃,先做些什么东西,比如说这个视角器,我们先认识一下这个视角器上面这些按钮是干嘛的,我后续会 把那个图片就是说这按键怎么用的,怎么用的,那个图片会,呃,发成图片拍短的一个视频里面,你们自己先看一下, 我们一步一步一步,然后去学习这个工业机器人。安川的工业机器人。然后我自己也要学嘛。然后我们大家互相督促,互相纠正。好,就这样,下期再见。
56小杨不想调机 01:00查看AI文稿AI文稿
01:00查看AI文稿AI文稿翁公,翁公,安川机器人怎么程序计数?我们拿到试教器,然后要给这个程序计数。我们首先先将在程序的末尾加上 i n、 c 变量, 它是计数的,然后我们点击命令,然后有一个 i n、 i、 n、 c, 然后将它的 b 变量变成 i 变量, i 变量的话可以记的数比较多一点,将它改成 i 变量, 点击这个然后就能将它改成 i, 我 们将它设为 i 零,然后这样的话,这样,然后照这里它不是 i 零了,然后我们可以试一下它有没有在计数,然后它现在 i 零的内容是零,然后我们点击一下启动键,基建开始焊接 好,然后程序焊接完成,我们看一下变量的零就变成了一,然后他就可以在计数每 i 之层的计数。
141焊栋智造——翁工 03:41查看AI文稿AI文稿
03:41查看AI文稿AI文稿啊,今天给大家讲一下这个三零 plc 与安全机器人通讯 plc 端是怎么设置的啊?昨天也是有点事耽搁了,去现场修了一天设备,那咱们看一下啊,咱们组态已经是组完了,咱们组了一个 cpu 和一个网络通讯模块, 那咱咱们看一下网络通讯模块,这个起始 x y 是 零零六零,你这个一定要记住,咱们后续要用好,咱们这个已经是昨天已经设定完了,上条视频我们就把这个擦掉, 之后咱们点这个网络参数,咱们走的是 c c link 通讯,咱们把这个 c c link 点点点开,点开了呢,咱们可以看到它第一个就是起始 i o, 咱们设置这个起始 i o 一定要和你祖泰的那个起始 i o 是 一样的,所以说咱们设定成零零六零 之后,咱们 plc 这面类型是主站,咱们要设定成主站之后,下面你就按照这个些设定总连接台数五十七台也可以改,这个多少台都可以改 完了,这个远程输入是从 x 一 百输出 y 一 百开始的,之后咱们就往下看,咱们在哪设定这个站数呢?就是在这个站信息,咱们点开这个站信息呢,咱们可以看到这有远程 i o 站、 远程设备站、智能设备站、远程设备站和智能设备站有这些站,那咱们安川机器人呢,就要用智能设备站 之后站数呢咱们也可以看有一站、两站、三站、四站,咱们就用四站之后点数就是一百二十八个点位,这个也可以改的,那我这个也是设定好了,我设定了四十一站是跟他连接的站,就是智能设备站, 占用四站一百二十八个点,那这面呢设定完了之后可以点设定结束,设定结束了,这块点设定结束,那咱们 plc 这边就是设定完了之后,这就是软件上的设定,那它硬件上呢?咱们可以看一下, 咱们需要从这个端子,从这个模块走这个通讯线,走到安全机器人,那咱们就接了一个通讯端子牌,大家可以看一下, 那就是这就是三零的 c c link 通讯线,蓝色、白色、黄色和这个,那他们就是叫 d a, d, b, d, g 和 s, l d, 那 咱们要把这四根线接到安全机器人的身上,他才能 通讯上,所所以说咱们软件设定了线要接上才能设定,那咱们看一下咱们这根线,这根线一直从这走的,就是接到安全机器人身上了,那咱 们可以看一下咱们接到安全机器人哪的呢?咱们接到安全机器人的这个 这个板卡上了,那这个板卡呢?是咱们后买的,因为是后配的板卡,它这个板卡是安全机器人 c c link 板卡, 咱们接了这个 d a, d, b, d, g 和 s l d 三零的 c c link 通讯线,但当然它也支持西本子的 perfect night 通讯,你也可以买 perfect night 的 板卡,就是买哪个板卡它支持什么通讯。把板卡插在这个安全机器人的里头之后,再接上线, 他就可以走 cctv 通讯了之后明天给大家讲一下他这个安全机器人这边用摄像器是怎么设定的,他接完线了也得设定一下。










猜你喜欢
- 1.5万大神修车