韩国kk使用教程
给大家讲一下这个爆款采集的一些功能,首先我们打开软件 点登录,软件会自动登录三遍, 呃,刚开始启动的时候有点慢, 这是登录第二遍, 他会自动登录,哈,不需要手动去点登录 啊,这个是第三遍, 然后登录完的话,我们讲一下这个爆, 目前爆款的话不怎么被淘汰啊。店铺 id, 汽拼单内幕采集,整店采集,这个比较费。 ok 啊,目前还没有找到更好的解决办法 啊。一般放入 到五个脱贫就可以,因为他他这个不怎么会脱贫,基本上脱贫不会死。那我比如说我们讲一下这个价格,这个价格就是你要采集的产品价格, 我们设置一到三百,然后以拼的话就是说采集他以拼单的数量, 那总受是什么意思?如果说你不要这个功能就点不要,然后这个功能就失效了。 想买的意思。嗯,你不要的话就点不要,这里负一就是失效了。如果你想要的 种兽的意思就是这个意思。 你像比如说这是 一六八零,如果你点不要的话,这个功能这个总售的功能就会失效,这些产品就会抓起出来。如果你这里显得是一到一百,像这个产品 就会被软件过滤掉,因为你要的是一到一百之间的这个想买的意思。 呃,想买的意思就是想拼的意思,现在了拼多多改成想拼了, 乱象。如果是负一跟零,这个功能就失效了,如果是说,比如说五能想拼,我就是说我设置一, 一到五,你像这个产品就会被抓起出来,如果设置一到四,这个产品就会被过滤掉, 如果点不要这负一的话,这个功能就失效了,就是说有多少人想评都会被判为就是符合的产品, 一般一般这两个功能直接点不要就可以。然后这个上货时间的话,就是说你采集的 啊,上家啊,他什么时候上的货?然后页数就是采集多少页,比如说你放到一到八页 啊,踩少一点,演示一下 这个新品标是什么意思呢?就是说如果是说嗯,打底衫,如果有新品标的话,他会优先采集 新品标,如果没有新品标的话,他也会,就是说正常采集, 然后采集的话点采集就可以。这第二步的话啊,就不用勾选了,什么都不用动。 呃,软件刚开始启动的时候有点慢, 软件是自动打码的,打码不收费用,然后他是财气,就是说本地打码。所以说这台电脑的鼠标的话就不能乱动 啊,会出现那个抢鼠标的情况。 软件如果是说出现了崩溃的话,软件会自动重启, 完全是模拟手工采集的采集的数数,采集的数据的话 是百分之百实实的, 就是说我们收第一个词,小白鞋,他们在自动在这里收小白鞋, 然后他自动会下拉,你如果是设置设置了两页,他就下拉两页, 你像如果出现这种单页面的话,这是脱贫的问题,这样的话你可以换一个, 但是他其实不影响采集速度。还有一个就是说如果你采集出来的 数据的话,想分类的话,这个软件自带分类功能,就是点击这个功能点爆款,然后登录一个店铺, 然后添加店铺。呃,就是扫码,任何一个店铺登录,不管是专营店还是普通店,然后登录后点提取,店铺提取完毕,然后这里点开始,然后软件会自动分类, 你想如果没点的话,他这里已有内幕,零个就是说明没有分类,如果是说你中途分类想导出来,你可以点这个导出已有类目, 就是把分类好的导出来,没有分类的继续放在软件里面,分类完成情况可以看一下,就是说 获取的多少数据,有多少数据已经分类了,如果全部导出的话,就是有没有分类的数据都会被导出来。 然后这里有一个是否有人头拼单呢?就是说有没有正在拼的, 就是这个意思。你像这个零的话,就是没有正在拼的,像这二就说明有人有正在拼的, 说明他这个有正在拼的,像这个零的话就没有正在拼的,这个就是说有是否有人头拼单的意思。 这个新品的话就是新品标的意思, 然后这是商品名称,这是关键词采集小白鞋,关键词采集了这么多数据,然后商品 id, 七平单的价格,然后一瓶数量,然后上货时间, 然后是店铺 id, 商品链接,店铺链接。这里还有一个就是说这是我们后期后期开发的,要搭配我们自己的软件,就是说建图功能, 就是说采集出来的软件,我们把这个呃主图给主图,主图地址给获集出来了, 后期会做一个这个软件,就是说能批量的建图,就是说就是一个整夜 可以看二十张主图,如果是说你感觉这张主图有 logo 的话,你点一下,然后这个链接就会被下掉,这样实现的就是说上货之前把那个主图全部建好, 然后,然后可以把这批货同时铺到很多店铺里面去, 这个建图非常非常的方便。 然后其他的功能就不掩饰了,因为其他的功能 啊也可以踩,但是比较费套屏,目前这个爆款功能啊一到。

粉丝1270获赞809
相关视频
 07:32查看AI文稿AI文稿
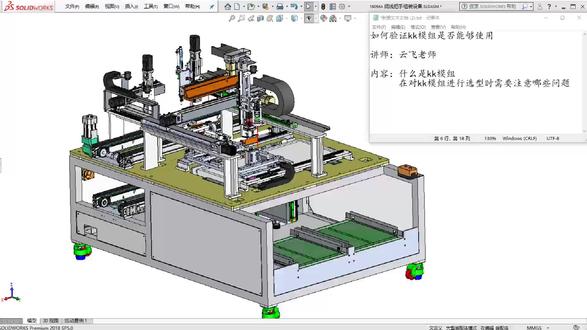
07:32查看AI文稿AI文稿大家好,我是云飞老师。本节课呢,我们一起来看一下如何验证 kk 模组是否能够使用。那么本节课的重点呢?就是什么是 kk 模组。那么在对 kk 模组进行选型的时候,需要注意到哪些问题呢?今天我们就针对这两个点来进行详细的解读。 好,那如果说你对飞镖设计感兴趣的话,可以添加屏幕上方的联系方式。接下来我们继续的来讲解。 那么首先一起来看一下这台设备,这是一台绕线把手的组装设备,那么一开始呢,是通过人工上梁的方式,把这个料牌啊放到这台皮带输送机上, 这个皮带输送机呢,他的作用就是把这个料盘输送到这个顶升输送机构的平台上方,通过这个顶升机构啊,来提升这个平台高度,再通过上方的这个一辆 机构呢来去移动这个绕线把手。好,那么上方的这个仪料机构啊,这是一个三轴的仪料接受,那么三个轴用的都是 kk 模组。那么什么是 kk 模组呢?它其实就是台湾上映的一个产品的简称,又叫单轴机器人 啊。呃,那么他跟我们平时所用的这种丝感机构相比啊,最大的不同就是结构上的不同。我们来看一下啊,他这里呢有一个样侧。 那么传统的这种现行平台,它的结构有四个部分,第一个就是有这么一个平台对吧?第二个呢就是这个机座, 第三部分就是线性滑轨,以及第四部分就是中间的滚柱螺杆。而且呢滚柱螺杆你还需要对他进行支撑,要用到固定端和角质端对吧?那么还需要 电机呢,来带动这个滚轴司感运动,虽说从结构上来讲呢,比较复杂,但是现在呢,用的还比较多,对吧?那么 kk 模组呢,它只有两部分组成,第一部分就是中间的滚轴螺杆,第二部分呢,就是下方这个节程式的 u 型高贵,因为它是属于节程式的。我们来看一下啊,它的优势 就是我们可以快速选用,安装体积精简对吧,钢性高。而且它这个能够大幅度的呃,减少使用空间,就是更加的使用空间嘛,对吧?好,那么这就是它的优势啊。那我们如果说想去对一个 qq 模组精选型,应该注意到哪些问题呢?他们 之前啊,呃,老师有讲过对吧?呃,第一个我们需要做的问题就是这个定位精度问题。比如说这里是一个医疗机构,对于定位精度需求大约是在零点一毫米左右,那么 kk 模组能不能满足? 绝对是能够满足的啊。 kk 模组呢,它分为两个精度等级,一个是一般级的,一个是精密级的。一般级的定位精度能够达到零点零四,这个其实已经很高了对吧?精密级呢,能够达到零点零二,或者是零点零二五。 那么用在本台设备中啊,这个 kk 某组的定位精度绝对是能够满足呢我们的使用需求的, 对不对?好,这就是第一个问题,关于定位精度问题。那么第二个问题呢,就是形成问题。我这里是希望通过这个模组带动这个。 呃,正空吸盘和这个,这是一个相机对吧?是先上下左右前后的运动,那么上下左右前后运动的距离呢?就是由这个行程来决定的对吧?假如说我这里啊需要带动他上下运动距离是五百的话,那么根据我们对于具体需求,就能够去出选合适型的 来往下看啊。比如说 k k 三零的,他这个导轨长度呢?只有七十五到两百对吧? k k 四零有一百的两百的, k k 五零呢?一百五的三百。 那如果说我们需要的是呃这个五百行程的话啊,我们只能选 ka 六零或者是大于六零型号的模组对吧?这就是第二个问题啊,根据你对于行程的需求,咱们去初选呢这个模组他的型号来咱们记录一下啊。 第一个问题就是定位精度,第二个问题呢,就是这个形成问题。 那么第三个呢?就是这个岛城。岛城它指的是什么呢?就是说呃,咱们刚说了啊, k k 木子中间用的同样是滚珠丝杆对吧?滚珠丝杆旋转一周落么?做在丝杆上运动的距离 就是这个岛城了,跟螺杆的螺距是一样的啊,螺杆我们叫螺距,四杆呢,我们也叫岛城对吧?好,那么这个岛城它影响的就是这什么呀?就是速度啊。这里也有公式啊,这个 n 转速乘以 pb, 岛城等于 v 速度。 咱们假如说电机转速是不变的,那么导程越大哎,你所带动的这个物体呢?它运动的越快对不对?你这个导程越小的话呢,肯定是速度越慢的。所以说根据我们对于速度需求,我们可以选择号导程的。比如刚刚咱们选的是 kk 绿零的对吧?根据新人选的吧。那么看一下啊, kk 绿零它是有两个导程的, 一个是零五,一个是一零。那如果说我们要求速度快点,就选一零的,要求速度慢一点的选零五的,再搭配合适的电影转速,就能够匹配出呢我们所需要的速度了,对吧?着急三个问题啊。那么第四个问题呢,就是负载问题。 他是由两部分组成,一个是这个滚珠螺杆,一个是线滑轨。那么滚珠螺杆他能否带的动这么重复杂。以及呢,线滑轨他能否承受这么重负载呢?这都是我们经过详细计算啊,来计算出实际数值, 再通过他所提供的允许数值呢,咱们对比,如果说我们算出的实际数值比容许值小的话好,那么这个呃模组是可以用的。但如果说我们算出的数值拼大的话呢,那要选择大于贵的模组才可以,对不对?好,我们来看一下啊。 首先我们分析滚珠丝感的,滚珠丝感呢,他所受的力啊有三个,第一个就是 ma 加速力对吧?第二个呢,如果说你是竖直的啊,他还要受一个重力 mg 以及你带动这个机构运动的所需要克服摩擦力, amg 就是这三个力。如果 是水平摆放的,比如说这个水平,呃,左右和前后这两个模组啊,他就不受这个重力了,只受加速率和摩擦力对吧?好。那么 m 这是一个以质量你带动的这个机构多重,多少千克以质量对吧?没有的话,那么技术咱们给零点一就可以了啊, 就可以了。那么这里这呢就是去十嘛,好算一些对不对?好。那么现在不知道的就是个 a, 这可以指的是我们要求它的匀速的时候,速度少,再比上呢,这个电机加速时间,咱们一般是用四伏电机,加速时间就零点一秒,经过计算加速都能求出来。 这个速度是根据咱们吸取来的啊,这个加速时间是一致的,所以说加速度呢,就能取出来对吧?好,那么经过计算就能够算出滚珠式感特殊独立了。然后呢,跟这个样子里面啊沙他所提供的这个基本动物和精对比,那如果说我们算出的数值偏小 哎,这个思感是能够带的动的对吧?但如果是拼大的话呢,那就不行了,咱们要考虑去选择大 a 规格的模组了,对吧?好,这是第一个啊,固定思感的。那么第二个呢,华贵的华贵,它承受的不是一个力,而是一个力举啊,而是一个力举。那你首先分析一下此时呢这个 华为他是受的力啊,是属于哪种情况。比如说咱们拿水平摆放的这个模组为例,他此时受的力啊,我们看一下,他提供了三种, mrmpmy, 他此时受的力更多的是第一种 mr 对吧?那么 mr 这里呢,又有提供这个啊,滑坐 aea 二,他们两个呢,能够承受的这个扭曲大小, 那你算好这个实际扭矩去对比不就可以了吗,对吧?好。那么今天啊,关于呢,如何去验证这个模组是否能够使用,以及呢我们选人是需要注意哪些问题?咱们就讲这。我是云飞老师,咱们下节课啊,再见。
 00:44
00:44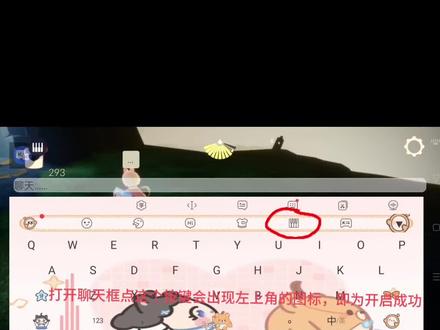 01:32查看AI文稿AI文稿
01:32查看AI文稿AI文稿打开聊天框,点这个按键会出现左上角的图标,即为开启成功。第二种方法,点我的, 打开这个功能就可以了,任意一种方法,打开功能后,点击左边列表的开始定位,选择对应游戏开始定位,就能开始演奏了,左边可以停止和加倍速哦。
7613情雨吖 07:51查看AI文稿AI文稿
07:51查看AI文稿AI文稿大家好,我是云飞老师,本节课呢我们一起来看一下如何验证 k k 模组是否能够使用,那么本节课的重点呢就是什么是 k k 模组,那么在对 k k 模组进行选型的时候需要注意到哪些问题呢?今天我们就针对这两个点来进行详细的解读。好, 那如果说你对飞镖设计感兴趣的话,可以添加屏幕上方的联系方式,接下来我们继续的来讲解,那么首先一起来看一下这台设备, 这是一台绕线把手的组装设备,那么一开始呢,是通过人工上脸的方式,把这个料盘啊放到这台皮带输送机上,这个皮带输送机呢,它的作用就是把这个料盘 输送到这个顶升输送机构的平台上方,通过这个顶升机构啊来提升这个平台高度,再通过上方的这个移料机构呢来去移动这个绕线把手。好,那么上方的这个移料机构啊,这是一个三轴的移料接受,那么三个轴用的都是 k 魔组,那么什么是 k k 魔组呢?他其实就是台湾上映的一个产品的简称,又叫单轴机器人啊。呃,那么他跟我们平时所用的这种思感机构相比啊,最大的不同就是结构上的不同,我们来看一下啊,他这里呢有一个样册,那么 传统的这种线性平台,它的结构有四个部分,第一个就是有这么一个平台对吧?第二个呢就是这个基座,第三部分就是线性滑轨 以及第四部分就是中间的滚珠螺杆,而且呢滚珠螺杆你还需要对它进行支撑,要用到固定端和较直端, 对吧?那么还需要定期呢,来带动这个滚珠丝杆运动,所以说从结构上来讲呢,比较复杂,但是现在呢,用的还比较多,对吧?那么 kk 模组呢,他只有两部分组成,第一部分就是中间的滚珠螺杆,第二部分呢就是下方这个集成式的 u 型导轨,因为他是属于集成式的,我们来看一下啊,他的优势 就是我们可以快速选用安装铁技精简,对吧?刚性高,而且他这个能够大幅度的呃,减少使用空间,就是更加的省空间吗?对吧? 好,那么这就是他的优势啊,那我们如果说想去对一个 qq 模组进行选行,应该注意到哪些问题呢?我们之前啊,呃,老师有讲过,对吧? 第一个我们需要做的问题就是这个定位精度问题,比如说这里是一个医疗机构,对于定位精度需求大约是在零点一毫米左右,那么 kk 模组能不能满足,绝对是能够满足的啊, kk 模组呢,他分为两个精度等级一, 一个是一般级的,一个是精密级的,一般级的定位精度能够达到零点零四,这个其实已经很高了,对吧?精密级呢,能够达到零点零二或者是零点零二五, 那么用在本台设备中啊,这个 kk 模组定位精度绝对是能够满足呢我们的使用需求的,对不对?好,这就是第一个问题,关于定位精度的问题, 那么第二个问题呢,就是形成问题,我这里是希望通过这个模组带动这个,呃,真空吸盘和这个,这是一个相机,对吧?实现上下左右前后的运动, 那么上下左右前后运动的距离呢,就是由这个形成来决定的,对吧?假如说我这里啊,需要带动他上下运动距离是五百的话,那么根据我们对于距离需求就能够去出选合适型号的模组了。来往下看啊, 比如说 kk 三零的,他这个导购长度呢,只有七十五到两百,对吧? kk 四零有一百的两百的, kk 五零呢?一百五的三百,那如果说我们需要的是呃这个五百形成的话啊,我们只能选 kk 六零或者是大于六零想要的模组, 这就是第二个问题啊,根据你对于形成的需求,咱们去出选呢,这个模组他的型号来咱们记录下啊。第一个问题就是定位精度,第二个问题呢,就是这个形成问题,那么第三个呢, 就是这个岛城。岛城他指的是什么呢?就是说,呃,咱们刚说了啊, k m 字中间用的同样是滚珠丝杆,对吧?滚珠丝杆旋转一周落幕做在丝杆上运动的距离 就是这个岛城了,跟螺杆的螺距是是一样的啊,螺杆我们叫螺锯丝杆呢,我们也叫岛城,对吧?好,那么这个岛城他影响的就是这什么呀?就是速度啊,这里有公式啊,这个 n 转速乘以 pb 倒乘等于 v 速度,咱们假如说电机转速是不变的,那么倒乘越大,哎,你所带动的这个物体呢,他运动的越快,对不对? 你这个导成越小的话呢,肯定是速度越慢的,所以说根据我们对于速度需求,我们可以选择号导成的,比如刚刚咱们选的是 k k 绿零的,对吧?根据形成选的吧。那么看一下啊, k k 绿零他是有两个导成的, 一个是零五,一个是一零,那如果说我们要就速度快点就选一零的,要就速度慢点的选零五的,再搭配合适的电音转速就能够匹配出呢我们所需要的速度了,对吧?这第三个问题啊,那么第四个问题呢,就是负载问题, 他是由两部分组成,一个是这个滚珠螺杆,一个是线滑轨,那么滚珠螺杆他能否带的动重不重负载,以及呢线滑轨他能否承受这么重负载呢?这都是我们经过详细计算啊,来计算出实际数值, 再通过他所提供的允许数值呢,咱们对比,如果说我们算出的实际数值比容数值小的话好,那么这个呃模组是可以用的,但如果说我们算出的数值偏大的话呢?那要选择大规格模组才可以,对不对?好,我们来看一下啊。首先我们分析滚珠丝杆的,滚珠丝杆呢,他所受的力啊, 有三个,第一个就是 m a 加速力,对吧?第二个呢,如果说你是受脂的啊,他还要受一个重力 mg, 以及你带动这个机构运动的所需要克服摩擦力, mg 就是这三个力,如果说是水平摆放的,比如说这个水平 左右和前后这两个模组啊,他就不受这个重力了,只受加速率和摩擦力,对吧?好,那么 m, 这是一个已知量,你带动的这个机构多重?多少千克已知量,对吧?没有的话咱们去数,咱们给零点一就可以了啊,给零点一就可以了,那么这里这个呢,就是去十吗?好,算一些 对不对?好,那么现在不知道的就是个 a, 这个 a 指的是我们要求他的匀速的时候速度少,再比上呢这个电机加速时间,咱们一般是用四伏电机加速是零点一秒,经过计算加速度能求出来,这个 速度是根据咱们吸取来的啊,这个加速时间是一致的,所以说加速度呢就能求出来,对吧?好,那么经过计算就能够算出滚珠四杆,他是自立的,然后呢跟这个样册里面啊杀他所提供的这个基本动,我店复合金对比, 那如果说我们算出的数字偏小哎,这个丝杆是能够带的动的对吧?但如果偏大的话呢,那就不行了,咱们要考虑去选择大规格的模组了,对吧?好,这第一个啊,关注丝杆的,那么第二个呢,滑轨的滑轨他承受的不是一个力,而是一个力举啊,而是一个力举。 那你首先分析一下,此时呢这个滑轨他是瘦的力啊,是属于哪种情况,比如说咱们拿水平摆放在这个模组为例,他此时瘦的力啊,我们看一下,他提供了三种 mrmpmy, 他此时瘦的力更多的是第一种 mr, 对吧?那么 mr 这里呢又有提供,这 这个啊,滑坐 a 一 a 二他们两个呢,能够承受的这个扭矩大小,那你算好这个实际扭矩去对比不就可以了吗? 对吧?好,那么今天啊,关于呢如何去验证这个模组是否能够使用,以及呢我们选项时需要注意哪些问题?咱们就讲这,我是云飞老师,咱们下节课啊,再见。
 01:50
01:50 00:39查看AI文稿AI文稿
00:39查看AI文稿AI文稿如何用 kk 键盘里的雨蛋?先打开 kk 键盘,点下面的雨蛋,然后找呀找,找到个喜欢的点击, 然后去找人试试,点这里发发发, 可以再添加一些雨蛋, 你学会了吗?
3850KK键盘



![[韩国主播中字] KK操作看呆韩国主播 EDG VS GIA #EDG #GIA #韩国主播 #无畏契约 #EDG战胜GIA](https://p3-pc-sign.douyinpic.com/image-cut-tos-priv/b114c138c954ac357c87d6a8630c1e88~tplv-dy-resize-origshort-autoq-75:330.jpeg?lk3s=138a59ce&x-expires=2096560800&x-signature=bSTUrFS9A6SzENYPlNiPQF7n%2FK0%3D&from=327834062&s=PackSourceEnum_AWEME_DETAIL&se=false&sc=cover&biz_tag=pcweb_cover&l=20260612024530A25B57BCCE96BA3EA727)


![[韩国主播中字] KK操作看呆韩国主播 EDG VS EG #EDG #蔚蓝档案 #韩国主播 #无畏契约洛杉矶全球冠军赛 #无畏契约](https://p3-pc-sign.douyinpic.com/image-cut-tos-priv/d80181e99e31355c642c8872ffc4a743~tplv-dy-resize-origshort-autoq-75:330.jpeg?lk3s=138a59ce&x-expires=2096560800&x-signature=4VrUu1m4WlwjjFcui2aILyUTQN4%3D&from=327834062&s=PackSourceEnum_AWEME_DETAIL&se=false&sc=cover&biz_tag=pcweb_cover&l=20260612024530A25B57BCCE96BA3EA727)
猜你喜欢
- 1792穆云粥