相律公式自由度计算
每天一分钟两个带泥裹基础。今天我们讲像平衡这一张的像绿和克拉修斯克拉贝隆方程。 哈喽哈喽哈喽,我是脸哥。今天我们首先讲相绿相绿的公式。 f 等于 c 减 f 加 n。 n 是可能影响系统平衡状态的外界因素的个数, f 等于 c 减 f 加二。外界因素只有温度和压力,如果有半透膜存在,会有渗透压,则 f 等于 c 减 f 加三。 其中 f 是自由度, c 是组分数, f 是项数。然后 c 就等于 s 减去 r, 减去 r 一撇, f 是物种数, r 是独立化学反应式, r 一撇是压力或浓度之间的关系, f 一撇又等于 c 减 fei 加一, f 一撇是条件自由堵。接着我们讲车道修丝、车道备用方程。首先纯物质企业两项平衡。有这只式子 不太用记,了解就行。主要要记他的记分式,也就是 lon p 二除以 p 一等于 data h m 除以二,括号 t 分之一减去 t 二分之一。式子很重要,一定要记住 这个柿子的两个非常重要的应用。当知道某一温度下的蒸汽压和该反应的蒸发寒,则可求另一温度下的蒸汽压。当知道某一压力下的沸点和该反应的蒸发寒,则可以求另一压力下的沸点。如果想增加系统的学习专业课,记得私信我哦!强化班火热招生中, 海大化学跟脸哥上班小 taste 持续关注我,我会在下期视频里为大家讲解更多关于海大化学相关专业的考研干货,记得点赞加关注哦!

粉丝1664获赞9712
相关视频
 15:00
15:00 00:30
00:30 19:47
19:47 02:59查看AI文稿AI文稿
02:59查看AI文稿AI文稿大家好,今天由我来为大家讲解二杠六制道 作业题。首先我们看题目,他是要求计算机构的自由度,以及指出复合铰链局部自由度和约束, 然后判断机构是否具有确定的相对运动。那么我们知道机构具有确定的相对运动就代表他的自由度和原动键的数量是相等的,那么在这个题中他的原动键是只有一个, 然后我们来复习一下节油度的计算公式。 f 等于三减二, p l 减 p h 是代表机构中的活动构建的数量, p l 是指低辅的数量, p h 是指高辅的数量。然后我们来看机构中的角链,复合角链是指多个 杆在同一处构成,叫转动负,那么我们可以看到这个图中是没有的。至于这个滑块的地方,它是一个滑块和两个杆构成的,因此并不是局部自由度也是没有的,虚约数是指它这个, 嗯,运动负并不影响这个机构的运动。那么我们可以看 e 和 f 是一个特殊的几何关系,那么 e 和 f 可以舍去一个。我们可以看题目中活动构建的数量是一共有四个,首先是上面这个杆, 然后是贯穿滑块的一个杆体,第三个是滑块,第四个是圆动键的地方,它的转动负首先是 f, 然后是 d 构成的转动负,然后是滑块构成的一个转 动副和一个移动副,最后是两个机架的位置构成的两个转动副,一共是六个,高幅是没有的。那我们带入自由度的计算公式可以得到,此时机构的自由度是零零的话,他是无法运动的,若是他具有相 对的相确确定的相对运动,那么它的原动键是一个,它的自由度等于一即可。因此我们可以增加一个活动构建,同时增加一个低辅活动构建 一个自由的活动构建。他的自由度是三,一个低负是减去两个自由度,那么可以增加一个自由度。在这个,我们可以在这个地方增加一个转动负,然后增加一个活动构建,那此时我们增加一个活动构建,活动构建数量由原来的四改变到了五,同时 值也增加了一个转动负增加一个低辅,那么他的转低辅的数量也增加了七。这个机构中改变之后依旧是没有高辅的。我们带入自由度的计算公式可以得到,此时的自由度等于三乘以五,减去二乘以七等于一。 它和圆中间的数量相等,那么此时机构可以运动,并且具有确定的相对运动。
76小卫老师大讲堂 01:07查看AI文稿AI文稿
01:07查看AI文稿AI文稿相率的原则为系统的变量个数减去变量之间的关系式的个数。相率的形式为 f 等于 c, 减 five 加二。如系统增加了 n 个变量,增加了 m, 个等式上市,就变为 f 等于 c, 减 five, 加二,加 n 减 m。 做个练习吧。 组分数为二,项数为二,加二。一个渗透平衡系统增加了一个压力变量, 因此再加一,所以自由度为三。下一个练习组分数为三,两项加二。有一个压力为十万一千三百二十五怕的等式,因此减一,所以自由度为二。 下一个练习有两个浓度限制条件,所以自由度为零。下一个练习硫酸水溶液冰两项已经确定, 则有几种,水合物就又有几项。因此本题是计算系统的最大项数。项数最大时,自由度为零。所以 f 等于 2, 减 fi 加二减 1 等于零, fi 等于 3。 故只能有一种水合物存在。
40浪漫山花 03:34查看AI文稿AI文稿
03:34查看AI文稿AI文稿对于平面机构,三个独立参数可以唯一确定单个自由构建的位置和姿态分别为两个互相垂直的位置参数 x y 和一个角度参数 c。 因此,一个自由的构建拥有对应的两个互相垂直的平移自由度和一个转动自由度。 运动负可以限制构建的自由度。如图所示,脚链可以限制两个移动自由度,还剩一个转动自由度。移动负可以限制 y 方向移动自由度和一个转动自由度,还剩 x 方向移动自由度。 高负可以限制外方向的移动自由度,还剩 x 方向移动自由度和一个转动自由度。对于单个构建来说,构建自由度等于三减约数数。机构的自由度计算公式, f 等于三 n 二 p l 加 p h。 其中 in 表示活动构建数, p l 表示低赴约数数, p h 表示高赴约数数。计算内燃机的自由度,活动构建数为六,分别为滑块时杆三、曲轴、转子、 直轴、转子幺零、杆八和杆九 b 复数为七,分别为角链 a、 角链 b、 角链 c、 角链 b。 移动负三个 高负数为三,分别为齿轮负和两个凸轮负。所以内燃机自由度 f 等于三 n 二 p l 加 p h 等于三,乘六减二乘七减三等于一。计算运动负的数目时,有一些特殊情况需要考虑,比如,当两个构建之间 有多个接触面,只能算一个面,也就是一个低负。如推所示,两个构件之间存在两个移动负,但只能算一个移动负。图臂两个构建之间存在两个角链,但只能算一个角链。 当两个构建之间有多个接触点,看情况,如果公法线重合,只能算一个高负,如图西所示, 否则算两个高富等价,一个低富,如图所示,左边等价于一个转动富,右边等价于一个移动富。 多个构建形成复合角链,角链的个数等于构建数减一,如图地所示, 构建数等于二。构建二的存在产生一个局部自由度。轮子的转动局部自由度对其他构建没有影响。把构建二和构建三焊在一起成为一个构建,这样去除了构建二的局部自由度。 敢构建似的存在与否对剩余机构运动没有任何影响。但敢构建似的存在产生了一个虚约术, 因为一个构建有三个自由度,同时带来两个角链,四个约束,所以相当于增加了一个约束。同样如此,去掉诱图感,构建一机构其他部分的运动不会有任何影响。同样如此,下图去掉两个小轮子,剩余的部分,传动规律不会有任何变化。 但这些多余的构建增加了一个须约束。那么为什么要出现须约束呢?须约束有三个作用,一、改善构建的受力 情况。二、增加机构的钢度。三、保证机械通过某些特殊位置,但也对构建的尺寸精度要求很高。否则需约束就将成为实际有效的约束,从而影响到机构的性能。
11机械设计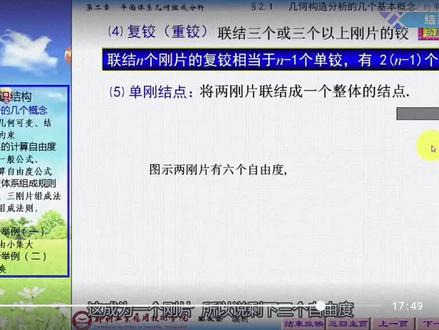 02:37查看AI文稿AI文稿
02:37查看AI文稿AI文稿那时候剩下三个自由度,所以说一个单纲节点可以减少体系,三个自由度相当于三个月数。 其实以后我们在进行几个构造分析或者计算自由度的时候啊,就把这两个钢片用一个钢结点连在一起的,这个整体看成一个钢片处理就行了。说钢结点将钢片连成一个钢片 啊,你不管是几个钢边,用钢结点连在一起,都会形成一个几何不变体系,你就把它看成一个钢边就行了。如果连了以后啊,连成这个形状是开口的, 那么这个钢片是无多元素的。一个钢片如果形成了封闭框,一个封闭框里面呢,得有三个多元素。比如说这是四, 这个钢片现在通过钢结点连在一起,形成一个钢片,你都把它看成一个钢片形了,他没有多余出一个钢片。然后我们再看这是一个钢片, 我们折再折一下,再折一下,折成一个开口的四边形,那这现在是一个钢片,没有多余约束。 如果我们现在呢,在这一个没有多余余处的钢片里面呢,再加一个单缸节点,那就是加进去三个月数,这就形成了一个五角的封闭口, 那这一个封闭框里面很显然有三个多月数。说每一个五角封闭框里面呢,都有三个多月数。这是 这是一个封闭款开口的封闭款,这是一个钢片没有多月数。如果我们给他加一个角呢,那就加进去两个月数。说有一个角的封闭款,那他有两个多月数。 这也是一个无多约束的几何不变体系。那现在呢,我们给它加了一个连杆呢,那就加了一个多约束,那么这一个体系就是有一个多约束的几何不变体系。 说以后再进行几个构造分析也好,计算自由度也好,我们就把多个钢片用钢结点连在一起的这一部分看成是一个钢片。 如果这一部分是一个开口的,将这两种情况是开口的,那它是一个钢片,没有多约束。如果连成了一个五角封闭框,每一个五角封闭框里面都有三个多约束。
17玉米盈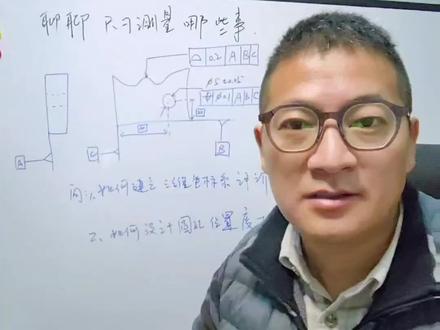 09:08查看AI文稿AI文稿
09:08查看AI文稿AI文稿大家好,今天我们聊一聊关于尺寸测量的两个问题。第一个,如何建立三维的坐标系,评价 一号尺寸和二号尺寸,关于一号尺寸和二号尺寸不是重点,重点的是如何建立三维的坐标系, 如何建立三位的座位系。第二个问题,如何设计圆孔的未知度减距,圆孔的未知度减距啊,圆孔的未知度减距,这个圆孔的未知度减距 啊。一号尺寸我们先看是面容阔度啊,面容阔度零点二, a、 b、 c 在 a、 b、 c 坐标系下的面容阔度要求是零点二,它既要评价形状,又要评价它的位置,也既管控形状又管控位置 的,一个结合目差,一个结合目差。第二个是位置度,这个圆孔的位置度,他要求是前后左右整个一周圈 位置啊,圆孔圆心的位置偏移的公叉带是零点一是零点一啊,是零点一,而面轮括零点二,它要求是 正零点一,负零点一,这是零啊,这个供差带 要求是零点二啊,在这个范围波动就是 ok 的啊,在这个范围波动就 ok 的。我们回顾一下上节我们谈的六个自由度啊,我们今天用六个自 度的概念,六个最度概念,看图纸当中的 a、 b、 c 坐标系是如何来控制我们这个产品的。然后第一个问题,建立三维的坐标系。第二个问题,设计一个圆孔的未知度减距啊,未知度减距。 首先我们看第一个问题啊,呃,建立三维的坐标系,其实我们在看到图纸 a、 b、 c 坐标系之后,我们已经对三维的坐标系呃已经有了呃一定的概念。通过六个最多的知识,首先 aj 是这个面,也就是这个面, 也就是这个面。 a 基准,这是背面啊,摆摆的背面,第一基准是控制,第二基准是,第二基准是控 控制他的什么轴向的,而 a 基准是他的, d 基准是控是,是他一个基础面。我们也知道上节我们说过 d 基准,基础面控制的是三个自由度, b 基准控制轴向, c 技术控制圆点啊,一个轴的一个圆点啊,一个重的一个圆点,那这个坐标系我们就把它已经建好了 啊,我在白板上画成这样,应该有点立体感啊,有立体感 c z, 记住,应该是啊, c a, 记住,控制的 z 方向应该是在这个地方, 这个地方,所以我们坐标系的原点是在这的,坐标系原点是在这的,那坐标系如何去建立呢?如果如 我,我们这产品他要求的是整个基础面最好的精度测量,精密测量,我们要把它放在大师平台上,或者我们的 cm 大师平台上啊, cm 大师平台上模拟基础体 去建立坐标席,为什么呢?啊?去建立 ag 纸,为什么呢?我们图纸当中这是一个直的啊,是一个直的,一个面平,非常平整,非常完美。但实际当中,在微观下面,他肯定是凹凹坑坑 啊,加工不到位啊,加工加工的肯定没有标准的数模标准,所以用几种模拟体啊,也就是最大的一个,什么外切面啊,用它的一个贴合面建立 ag 制面啊,建立 ag 制面。 如果图纸当中标有所谓的 a 一、 f i 五啊,比如说这是 a 二,这是 a 三,这是 a 四,那是要建立在产品的表面,建立产品的 a 几种元素的表面,它是目标机制。目标机制, 那建好目标基准之后,或者建好模拟基准,模拟式之后,控制三个自由度。哪三个自由度呢?三个点啊,我就说三个圆吧, c 轴位的移动,围绕 y, x 轴的旋转,围绕 y 轴的旋转,跟我们昨天 说过的啊,六个字柱的工作是一样的啊,工作原理是一样的, a 记准,还差三个轴向, b 记准,第二记准,他可以控制什么?控制他不能这样旋转, 不能沿着 y 轴移动啊,在这个表面,在这下表面可以打两个点啊,或者三个点勾在一个平面或者一条线, 然后我们还可以 x 轴还可以移动,这个地方 send。 那么再出测一个点 啊,三维的坐标系,我建议是在啊,目前最可靠的一个测量设备就是 cm, 就是我们的三坐标测量机啊,三坐标测量机,建立三维的一个坐标系啊,建立好之后, 我们在 pcd max 就是我以海克斯康啊的测量软件举例,他会有面轮廓的一个符号,你选择出之后,在当前的作为旗下去评价他, ok 了,这是一种评价方式。 海克斯方的测量软件有两种评价方式,一种是传统的评价方式,是直接在当前做标题下去评价,另外一种是可以选择机制啊,新的评价方式是可以选择机制的。第二个 未知度,我们所说的未知度零点一,也是在当前坐标系要去评价就 ok 了。我们建立好坐标系,所有的元素,在当前坐标系要去评价, 或者用新的方式选择 a、 b、 c 机制啊,三倍照片系就好了,通过六个自由度的认识啊,通过六个 足够知识。第二个如何设计圆孔的位置度减距,圆孔的位置度减距,假设我们这边会有 a 一基准, a 二基准, a 三基准, a 四基准,那我们在设计减距的时候,在设计减距的时候, 一定要不能用几种模拟体的方式去设计,因为他要求的有目标这种 a 一 a 二 a 三 s, 而且是 five, 假设我这个笔的圆柱是 five 啊,在一个,在一个底板上控制好 a, e, a r s, s, s l 五、控制好之后,产品只要放上去,放在对应的 a e, a r s s 就 ok 了,放上去之后它可以这样移动,还可 可以这样移动,还可以这样旋转,那我们就要此时就要设置设计一个减距,下方设计设计一个什么?下方设计一个控制, 下方设计一个控制 b 基准平面的一个, 你也可以用这两个啊,做两个消钉孔啊,做两个那个定位消啊,定位消,也可以这边直接做成一个面控制,然后这边控制一个 c, 那就是这样的 l 型,类似于 l 型这样的一个,然后上面底板上会有一二三四 a 一 l s s, 然后我们再做一个箱子,那当然啊,在 做这个位置度减去这位置的减去这一块,我们的我们的减去的 a g 中底面上面会会有一个通孔,会有一个通孔,然后我们有一个通知规,类似一个通知规 啊,通知规的规格,通知规的规格,这个是啊,呃,要通过位置度的一个公差以及它的圆孔的大小的啊,圆孔的大小通过它计算出来,怎么计算?后续我来讲啊,我来讲这个具体的啊? 一个匹配基准、匹配尺寸是怎么去计算出来的?我们主要是看它圆孔的位置度,通过六个 c 度怎么去设计的啊?怎么去设计的?好,谢谢。
275举子哥 05:59查看AI文稿AI文稿
05:59查看AI文稿AI文稿各位同学大家好,今天咱们一起来学习有关相图的一些相关的知识, 那么相图这一张呢啊,对于做题来说,他是有一个很强的一个技巧性的,对于 咱们初学的同学来说,你如果是自己看书来做题的话,那我相信你这个过程一定是非常艰难的,但是当你学会了咱们这节课的一些做题的技巧之后呢,那你这个做题的时候就会非常容易的把题目做出来, 所以说呢,希望大家呃好好学习这堂课的内容。在学习本章内容之前呢,咱们还是先来做一个呃内容的回顾,上节课内容的回顾, 上节课呢,咱们一起学习了多组分系统热力学这一章,那么其中包括呢这个非常重要的一个方程式,它是苛刻方程啊, 他的最重要的一个形式呢,是这个咱们把数据带入之后的一个定积分的形式,也就是论 p 二比上 p 一等于得 h 比上二乘以 t 一分之一减去 t 二分之一,那么这个 形式呢,是咱们在做题当中最常最常遇到最常用到的一个公式,这个大家一定要牢牢的记住, 然后呢就是这个什么是质量摩尔浓度?那么我们知道质量摩尔浓度,咱们用 bb 来表示的话啊,他就是用咱们溶制的物质量 来比上一个容器的质量啊,就可以得到啊这个质量摩尔浓度。 然后呢咱们就学学到了一个偏木耳量,那么什么样的积分式咱们可以称为偏木耳量呢啊,咱们上节课也也强调过,一定是一个定 t 定 p 定组成的这么一个, 这个才可以称为偏摩尔亮啊,对,秀右下角标一定要是定 t 定屁近组成啊,才可以称为偏摩尔亮。 然后呢是咱们的化学室啊,化学室咱们又分为了这个侠义化学室和广义的化学室,那么哪一个化学室可以称为偏摩尔亮,以及咱们学到的那几个广义的化学室啊?他们 具体的形式是怎样的啊?这个希望大家在这个课下的学习过时候呢,一定要把它好好的记住啊,因为在选择题中或者是填空题当中都有可能会考到。 接着就是咱们两个非常重要的两个定律了,一个是这个拉腕定律,然后就是亨利定律, 他们分别适用的条件是什么啊?咱们上节课也学了拉腕定律,他是适用于这个啊,理想细溶液的溶剂以及这个理想液态混合物的任意组分,那么亨利定律呢,就是适用的条件是咱们的一个理想细溶液的一个溶质。 最后呢咱们又学到了西溶液的四个医术性啊,你比如说啊,凝固点降低,蒸汽啊, 下降啊,费点升高这几个医术性,最后还有学到了一个有关渗透压的一个医术性的内容啊,这些希望大家在课后呢都去认真的复习一下。 好,今天咱们讲到的一个呃,考点概数呢,它包括一个相率,相率,咱们来计算自由度, 然后呢就是像图了啊,是重头戏,咱们这些课的一个重头戏,他包括单组分系统,包括二组分系统以及这个三组分系统 啊,当然了,三组分系统他就是属于一个偏难的一个知识点了,他是在考试题目当中呢,遇到的不是不会很多, 那么我们着重讲的呢,还是单组分系统相图以及二组组分系统相图的一个内容啊,咱们看到这个二组分系统相图呢,又可以啊,细分为后面的括号里边这一些啊,包括,呃,这个 完全互融系统的蒸汽压组成图啊,沸点组成图以及不互融系统的企业平衡相图等等啊,包括这一系列的相图的题目呢,咱们都会讲到, 今天这个我会带大家做一些有关于相图的例题,那么通过这些例题呢,咱们就可以可以来掌握这个咱平时做相图题目的一些技巧啊,通过例题 来给大家展示出来。好,咱们来进入第一个内容的话,就是像绿 项率是什么呢?项率是吉布斯深入研究项平衡规律是推导出来的一个啊,数学表达式也一个公式,那么它的形式呢,就是咱们呃课件中写到的一个 f 等于 c 减再加二, 其中呢赛是系统平衡时的一个像素啊,呃,你像素什么意思呢?叶像,器像或者故像。那么 系统当中每每每多一个项啊,这个数也会相应的加一, c 为独立组分数,这个独立组分数呢,他也是有一个定义的公式的,这个公式是啊, s 减二减四,二二一撇。
53畅研考研 09:10查看AI文稿AI文稿
09:10查看AI文稿AI文稿大家好啊,今天我们讲一下注册计量师考试当中出现的频次。呃,特别高的一个公式,叫做贝塞公式,它也是整个注册计量师考试当中的一个基础,当中的基础就是重要,且基础包括在 a 列标准不确定度的评定 当中也特别的重要。 s x 等于根号加西格玛, xi 减 x 八的平方除以 n 减一, 其中 s x 呢叫做实验标准偏差, xi 呢是 ds 的侧的值, x 八呢是平均值, n 减一呢叫做自由度。然后统计学里管 x i 减 x 八呢叫做残茶。而另外呢, n 减一呢叫做自由度。那书上是有写道贝塞尔公式啊,他是表示测得值分散性,也就是 是测量重复性的这么一个公式。其实这个公式本身并不复杂,涉及到参涉及到的变量也不是很多。如果我们记住了这个公式,那么在考试当中计算呢?不确定度评定计算呢?其实都不是什么问题。 但是我觉得如果我们对这个公式背后的统计学意义有一个进一步的学习认识和了解,可能有助于我们对整个注册计量是考试内容的一个呃,认知的提升。 嗯,提出两个小的问题啊,也是当时我在复习的时候,在学习的时候,呃,最开始感觉很困惑的地方一个是啥呢?就是,呃,为什么说贝塞尔公示他就可以表示侧得直的分散性? 所谓分散性就是测量结果的重复性的统计的时候,呃,统计值的重复性。还有一个我特别不能理解的是,如果进行了 n 次测量, 那不应该除以 n 吗?为什么要除以 n 减一呢?我们先看第一个问题,什么是自由度吧,什么是自由度呢?自由度在统计学上就是说他是计算某一个统计量的时候,取值不受限制的变量的数量。 比如说一次方程, x 一加 x 二加 x 三加 x 四加 x 五等于十。当你对 x 一进行取值的时候,其实 x 一他是自由的,就是说他可以取任何值。 如果 x 一值定了,再对 x 二进行取值,其实 x 二也是自由的,可以取任意值。 如果 x 二也定了,那么在对 x 三进行取值的时候, x 三也是自由的,他可以取任意值。同理 x 四也是。但是当你 x 一、 x 二、 x 三、 x 四都取值完成,现在要对 x 五进行取值的时候,那么 x 五他只能得取得一个值,他不是自由的。所以对于这个五个变量来说呢,他的自由度呢,就是五减一等于四, 这自由度啊,他是呃统计学当中的一个基本概念,就在注册计量师考试当中对自由度的呃认识,我觉得到这里了解一下他代表的统计学意义基本就够了。 下面我们再来看一下,就为什么说贝塞尔公式,他就可以表示测量值的分散性。首先呢,我们先来回顾一下在统计学当中的三个比较基本的概念,分别是期望、方差和标准偏差。那什么是期望呢?期望就是一个平均值,他是无穷多次测量的平, 每一次测量的车辆只是 xi, 西格玛 xi 无形式测量的盒吹 n 就是期望值。期望值呢,用字母命来表示。 第二个呢是方叉,什么是方叉呢?方叉是侧得直。 xi 与期望值命之间的差,我们就叫随机无差,他的平方的期望, 我们可以把这个看成一个大的歪矮, 如果把它看成 yi, 其实这就是膝盖嘛, yi 除以 n 不就是一个 yi 的期望吗?那么 yi 是谁啊? yi 是随机误差的平方,侧得值与期望值的差的平方,这个是方差,方差在统计学 意义上他就是表示这个分散程度的。我们举个例子,比如说身高,我们先测很多学生的身高平均值是一米七,然后呢,假如说有一个学生是一米六五,那么另一个学生还有一个学生一是一米七以上, 那么这一个学生应该就是一米七五,还有个学生呢,就是一米六七,对吧?其中一米七零啊,他是平均值。 其实我们可以看到啊,当平均只取一米七零的事,这第一个变量是一米六五,第二个一米七三,一米六七。当这三个变量确定的时候,那你最后一个变量只能取一米七五,才能保证他的平均值是一米七。其实呢,他的自由度呢,就是四减一等于三,因为前三个是自 自由的,一米七五,他不是自由的,他只能去一米七五,才能保证车辆,结果平均值是一米七零,对吧?这不就是自由度吗?然后我们看,我们知道了他平均值是一米七,但是我们知道身高的分布是多少吗?是什么样一个整体情况吗? 一米六五和一米七七之间差多少呀?差负五,对吧?一米七零和一米七三和一米七零之间差三,一米六七跟一米七零之间差负三,一米七五跟一米七零之间差五。 如果说我们用他们之间的差,也就是 xi 减密的差,直接相加来表示他的分散性的话,你发现负五加三加负三加五,他等于零, 对吧?看不出他的分散型,那怎么办呢?我们就用这个叉给他取平房,给他取平房, 分别去平房,对吧?分别去平房,然后求他的期望值,就能代表这些变量的分散性。 但是一般情况下呀,方叉使用不太方便,所以我一般都用的这个标准偏差,所以标准偏差呢,就是方叉的正平方,跟你看根号下面变量跟方叉的变量都一样。方叉呢,用用用字母七个码的平方表示,标准偏差呢?用字母 西格玛表示。因为实际当中呢,不可能进行无限次的测量,所以呢,我们一般只能用有限次测量来分析无限次测量的整体情况。这个呢也是统计学的一个核心思想, 就说我怎么能够通过样对样,对这个样体的这个样本的这个数据的分析来啊,描述总体的 情况。我们举个例子,比如说我们现在要统计北京市高中男生的平均身高,那我有两种方法,第一种方法是测量全北京市所有高中生的男生身高,然后求平均值啊,求他的期望,求他的标准差,一个是平均值是多少,一个是他的分散性,怎么样? 第二个方法呢,我就抽样,我怎么抽样呢?我选取五个高中,每个高中每个年级,我选取二名二十名同学,然后测他们的身高,求他们的拼命值, 平均值是 x 八,七万是没有啊,平均值是 x 八,然后呢,我再怎么看他的分散性呢,我参照总体分,总体 就是无限次测量的这个标准偏差的计算公式。 xi 减去 x 八,不是不是没有了啊,因为我没有期望值,我只有平均值,然后除以 n 减一呀,阿里说应该除以 n 呢,那这里边为什么除以 n 减一呢?对吧?套用这个公式呢?不 应该除以 n 呢?为什么除以 n 减一呢?这个呢,其实是有一个严谨的数学证明,就是 法国的一个天文学家吧,叫贝塞尔,他严格的证明了,当你想用样本数据来分析总体数据的数据情况的时候,因为你减的是 x 八, 而总体情况简直是缪 x 八和 xm 他俩是不相等的,他存在一个 n 减一比 n 的这么一个数学关系。所以如果你想用这个 样本的数据来实现对总体情况数据的分析的话,因为你减的是 x 八,所以你必须要把这个之间的 n 减一倍的关系考虑进去,他通过数据证明 存在这么一个等式关系,那么只有当他除以 n 减一的时候,这个公式才能够等于这个公式,明白吗?这是有一个严谨的一个数学证明,就是贝塞尔他证明了,所以这个公式他叫贝塞尔公式。 大家如果感兴趣的话,也可以在网络上搜索一下贝塞尔工作者的证明过程啊,其实不太复杂啊,但是这里面呢,通过这个讲解,大家要知道为什么贝塞尔公示他能他分母是吹 n 减一而不是 n, 因为他出于 n 减一之后就达到了无偏差估计的效果,所以贝塞尔公示他可以表示 测量结果的分散性,也就是测量的重复性。好,今天就介绍到这里,再见。
558计量师大师兄 01:18查看AI文稿AI文稿
01:18查看AI文稿AI文稿讲完血数之后呢,给大家讲一下关于这个计算公式的的问题,为什么这个地方要减去局部自由度的个数?这个地方相当于就相当于加上这个血数的个数。呃,看下这个图, 这个图中它的局部自由度是滚子二,它这个局部自由度相当于什么呢?它就相当于 加了一个红头勾加二,一个红头勾加二,一个红头勾加的自由度是三。那么他在加入这个滚子之后呢, 他也同样的加入了一个转动符,低符就是他带入了两个约束,所以他就会导致整个机构多余了一个自由度,所以说他就是减去机构自由度的个数。 那么关于虚约数,我们以这个图为例,这个图中的虚约数是构件三和这两个 低负,他引入了这个虚数之后呢,就会相当于多了一个红的构件,就是三个自由度吗?那么他有引入两个低负,所以是减二乘二,就相当于给机构减去了一个自由度,所以说这个地方就相当于是要加上虚越数的个数。
22TOUJUAN 08:12查看AI文稿AI文稿
08:12查看AI文稿AI文稿各位小伙伴大家好,今天呢我给大家讲一个嗯,我自己觉得非常关键的一个那个理论知识啊,就是机构的那个自由度, 因为呢,机构自由度代表着这个机构能不能正常运动。 如果不去计算一个机构的自由度,然后和原动件进行比较的话, 你很可能就是会浪费时间。因为你设计的机构本来从原理上讲,他就是不能动,或者是 崩坏,或者运动不为一,就是很可能是随机的运动会产生。那么看一下啊,为什么要计算自 自由度啊,自由度的话,原动件,原动件指的就是驱动件吧,有的时候可能就是一个电机带动这一个机构,或者一个起缸带动这个机构。 而且一般情况下这个圆动键一般啊,一般情况下这个圆动键很可能就只有就只有一键对一般一个机构。 然后呢,如果说这个我们计算的时候啊,这个 f 一般就是在计算的情况下,因为一个圆动键嘛, f 如果等于等于这个驱动键的数量的话,他这个机构就是唯一运动的。 到后面我会举一些例子啊,如果这个 f 小于等于零,那这机构肯定是不能动的,大于零,且和圆动键数量相等,一般情况下是圆动键,如果是一的话,就 f 等于一,对 f 如果等于一的情况下,这个机构他运动是确定的,而且这个 就是这个机构应该就是 ok 的。如果他大于,然后大于这个圆动键数量,那机构的运动就是不确定的。你不知道最终的运动是怎样子的,如果这个大于零,但小于运动键的话,就会产生不能运动或者崩坏,等于卡死的一个状态。 嗯,然后呢,我们看一下啊,这个平面机构的自由都是计算, 他不设计。这我们现在讲的就是在平面上的运动,然后如果是,就是在空间上的话,他的自由。这个计算不是这么计算的,他有其他的公式。那我们先 一般情况下的机构分析呢?就是在平面上其实已经足够了,对复杂的可能会用到其他的公式。但我们现在先从简单的讲起,就讲这个平面平面机构的那个自由度的计算。哎,注意的是平面,然后公式是这个。我解释一下公式上的一些参数啊。 嗯,代表的是平面机构中的活动键的构数。就里面只要是能动的,不管他是长什么样子,是一根杆子,连杆还是一个滑块, 他是一个连杆还是一个滑块,他只要是能动的,那就代表就就有几个。嗯, 他其实呢是因为在平面上啊,在平面上一个零件,他就是要么就是 x 轴运动,要么就是 y 轴运动,还有一个他沿这轴的一个旋转,就是 这个面。如果是,就是这样一个旋转。对,就这三个自由度。所以说代表这一个能活动的机构键,这个活动的零键,他就有三个自由度。然后我们看哪些东西会约束他的自由度。 这里就引进了一个叫,这个叫低负。 pl 指的是 p 啊,那个指的是低负, ph 指的是高负。 那这个东西你想看一个零件,如果不约束他,那他就是三个字,有毒。但如果进行了一些约束, 那有可能怎么约束他,约束三个,如果三个都约束他,那他他就是机架,他是固定的。对,机架是固定的,他等于就是 他们三个自由度完全没限制住了。那如果限制两个,假设是两个,是这样子啊, x 五还把它 限制住了,只留一个旋转,只留一个旋转, 留这个,这两个都被限制住了,那他就是一个地府。 对。一般情况下,脚尖对,最最常见的地幅,脚尖两个连杆,中间是脚尖的,那就是地幅。那高负的话,很多时候用在凸轮上面对。他只限制一个自由度,其他的方向的自由度旋转都是不限制的, 就是限制一个自由度的,从原理上讲就是只限制一个自。从本质上讲,只限制一个自由度的,他就是高负,限制两个自由度的,他就是低负。 那这样子就很理解了,本身他这个零件就有这么多自由度,然后被限制了自由度之后,他那剩下的自由度,那就是指整个机构的整体的一个。 如果自由度和本身的驱动原动件是统一的,那就可以确定一个呃,稳定的一个动作。好,我们现在举一个比较那个简单的两个例子啊,给大家那个深入了解一下。 这个是 就是是曲柄摇杆和曲柄滑块啊, 这就是曲柄曲柄摇杆的一个。那个就是呃,一个一个动画吧。对, 然后的话我们看这个动画啊。我们就看这个简图吧。 移动键一个两个三个,这叫曲柄连杆。呃,摇杆。对,那就是我们按照这个公式啊, f 等于几 三?嗯,对不对?嗯,就是三对不对。然后减去他有,他没有高负,全是脚结一个,脚结两个,脚结三个,脚结四个脚结对不对?四个脚结,那乘以几?乘以二, 九减八等于一,那 f 等于一。 驱动键的原机就是这个转动的,比如说一个电机带动他转动,带动这曲屏转动,那最后他是一个稳定的机械结构对不对?我们再看这个 曲柄滑块怎么算?一个两个,一个摇杆两个,一个滑块对不对?这三个东西在动三个是不是那一样了?要不等于三乘三, 他有高负吗?没有高负对不对?简单的没有高负几个,几个低负,一个脚尖,两个脚尖,这里三个脚尖还有个滑块的, 也是滑块也只限制。嗯,滑块啊,滑块他也限制了一个 y 的, 然后还有一个旋转的两个自由度,现在两个自由度就是低负是吧?那就我们接着上啊。负等于三个零件,几个低负,一 个两个,三个滑块四个对不对?四等于二,也是一对不对?最后也是 f 等于一。驱动键一个对等于圆动键 稳定的对不对?好,我现在就简单的跟大家介绍了一下这个技术概念。因为在以后涉及任何机构的时候,肯定是必须先算,先算这个自由度的, 不然零件就是不然很可能啊,你可以用一些仿真啊,或者用什么去试,但最后肯定是要么卡死,要么过运动的。对。 好,谢谢大家观看。嗯,如果喜欢我的内容,请一键三点支持。好,谢谢大家啊!
 02:00查看AI文稿AI文稿
02:00查看AI文稿AI文稿同学们好,欢迎来到默默学课堂这一讲,我们介绍平面机构制约度计算注意事项, 这个是平面机构自由度的计算公式,公式当中 am 为活动构建数, pr 为低负数, ph 为高负数。 我们在使用上述公式计算平面机构自由度的时候,要注意以下几个方面, 一、复合搅铃复合搅铃呢,是指两个以上的构建在同一处,用转动副相连接构成的运动副, 这里是有三个构建,构建一,构建二,在同一处呢构成了转动户。那么如果说呢,我们对这个转动户呢? 换一个角度看,我们从侧面去看,那么看出来这个转农夫的这个构成情况是这样的,那么从这个图当中我们可以看出三个构件在同一处构成转农夫,实际上他是构成了两个转农夫, 以此类推,假设由 mg 构建绘胶而成的复合角帘 具有 m 减一个转动户,也就说这个地方假设有 m 个构建,那么最终 在这样一个位置形成的转农副的数量为 m 减一。这个图当中呢,是几种典型的复合角连的这个情况, 这是构建一,构建二、构建三,在这一处形成转农户。


猜你喜欢
- 12.2万一块西红柿🍅
最新视频
- 2.8万李稻葵