埃斯顿参数参数设置
今天给大家介绍艾斯顿四福是如何查看及设置参数的,我们先按一下 m 键,切换到 p n 零零零模式,如果我们要查看 p n 零零零参数的话,可以按最后一个键进入在显示的 b 零零零零就是目前设置的参数, 如果要修改这个参数,可以长按最后一个键一秒钟,长按后会出现一个小数点,每按一次最后一个键,小数点就会往前走一位,现在我们给它改成 0110, 改好后长按最后一个键,直至小数点消失,小数点消失后,参数就已经保存好了,按最后一个键返回即可。如果还想查看其他参数的话,可以按上键往上加,可以按下键往回减。 今天的视频到这里就结束了,你学会了吗?

粉丝740获赞1434
相关视频
 01:49查看AI文稿AI文稿
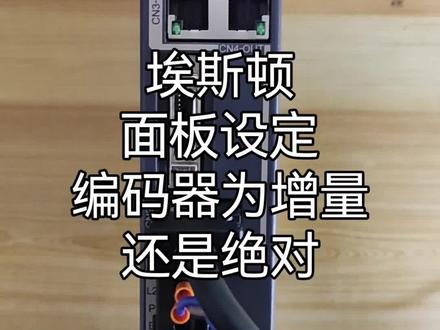
01:49查看AI文稿AI文稿s 顿驱动器使用操作面板修改参数。我们以参数 p n 零零二应用功能设定二为例,先按动 m 键,找到参数设定模式 p n 零零零, 按动上下键找到 p n 零零二, 然后按左键确定进入显示的是当前参数值 p n 零零二,这个参数的说明是对绝对值编码器的选择。从左 向右数第三位当为零时,表示将绝对值编码器用作绝对值编码器,当为 一时,表示将绝对值编码器用作增量式编码器,其他位保留为零。假设将参数零零零零改为零幺零零,我们先长按左键一秒以上, 看到第五位右下角出现小数点闪烁时,按动两次左键,将小数点移至第三位右下角,然后按动上键, 将第三位修改为一。修改完毕后,按 m 键 返回参数 pn 零零二,注意要重新启动驱动器,参数才会生效。
32北京精卓信 01:43查看AI文稿AI文稿
01:43查看AI文稿AI文稿今天给大家介绍下艾斯顿四伏的面板操作,我们先了解下艾斯顿四伏的状态显示, bb 状态是指四伏待机状态。 rain 状态是指四伏运行状态。 pot 和 naught 状态是指外部限位有效。 a 零一状态是指四伏产生报警,代码为 01。 pn000 是参数模式,用来设置参数。 按零零零是监控模式,用来监控四幅数据状态。 fn 零零零是应用操作模式,用来进行一些操作。按零零零 是监控电机的实际转速单位是 armin。 按 003 是监控电机的实时扭矩百分比。 按 004 是监控电机编码器旋转角脉冲数。 按 009 是监控电机转过的脉冲术,也就是四伏执行过的脉冲术。 按 0013 是尚未机给到四伏的脉冲数,可以判断四伏有没有收到脉冲。 喜欢的话可以点个关注哦!
360苏州擎合自动化 09:38查看AI文稿AI文稿
09:38查看AI文稿AI文稿大家好,本期视频为大家介绍常用的轴参数。当我们打开软件并连接到同步模式以后,我们可以看到在工具栏当中有一个工具叫做 access parameters 轴参数, 我们也可以在 tools 下达菜单当中第一个 access perimeters 选择打开。当我们打开周参数以后, 可以通过左上角的 select axis 来进行轴的选择,默认情况下,它这里面呢是不显示虚拟轴,只显示被激活的轴, 我们可以点击下面的按钮来进行找到勾选。比如我们要选 选择零一二三四个轴, 选择了以后呢,我们能够看到周零呢,他显示的是虚拟周,周一周二周三都显示 in x t 五没有激活的周。 这个呢是因为在系统当中我们对周一、周二周三没有过任何的操作,只要我们对周一、周二周三进行任意周三数的设置,他就会被显示是激活状态的周。比如我们设置 unisxx, 一等于一, unice axis 二等于一, unice axis 三等于一,这样子我们就能看到周一周二周三显示的就都是虚拟周了。然后 a type 的话呢,表示的 是轴的控制类型,龌龊呢,表示的他目前是一个虚拟轴。 unis 表示的是轴的单位,也可以理解为是脉冲单量。当我们控制一个轴,希望这个轴是以什么样的单位来被进行控制的时候,我们就可以将这个 unis 设置为这个单位所对应的脉冲数。 比如轴铃是一个直线运动的轴,我们希望对轴铃的控制单位是以毫米为单位进行控制,那这个时候我们就可以将轴铃的 unis 设定为一个毫米移动的脉冲量, 比如周零一千个脉冲会移动一毫米,那我们将周零的 unis 设定为一千。那后续我们 我们在对周龄进行控制的时候,使用的所有的单位都是以毫米为单位进行控制的。 当我们设置好 unis 以后,我们能够看到周三书表里面大部分的参数都跟着 unis 一起进行了变化,比如我们将 unis 改为一,我们可以看到速度,加速度还有限位的参数都跟着变化了。当我们再把 unis 改为一千 速度,加速度的单位呢也都跟着变化了。这个呢是因为周三数表里面大部分的参数都是以 unis 为单位来进行换算的, 比如我们的加速度表示的就是十个 unis 每平方秒,速度就表示零点零一个 unis 每秒钟。 目前用内思表示的单位呢是毫米为单位,那我们的速度的值呢,就是零点零一毫米每秒钟。我们可以在这里呢对于我们的速度进行修改设定,比如速度等于一,或者我们可以通过命令行来对速度进行修改, 在下面呢, cripp 是爬行速度,一般呢用在回源点的时候的反向爬行的时候的指定速度。 m speed 是 mace 的 speed, 表示通过电机编码器反馈测量到的实际速度。 vp speed 指的是控制器输出的指令速度, 再往下呢是一些鲜味圆点相关的参数。 datamin 表示 指的是我们原点使用的基金开关,他接入的 l 点数是几号点? fe limit 表示的是对跟总偏差进行了限定, 在最下方呢,我们能够看到有一个参数叫做 fe, 这个 fe 呢指的是 following iron。 跟踪偏差 是指我们的指令位置和实际位置之间的差值。这个 fe 类 mate 就表示的是当系统跟踪偏差超出我们的设定值以后,会产生一个报警。 然后 f w d in 和 r e v in 分别表示硬件的正向线位和反向线位。 fs limit 和 is limit 表示的是正向的软件线位和反向的软件线位。 当我们将 fs limit 设置为一百, rs limit 设定为负的一百,那就表示我们的轴零只能在正负一百之间进行移动。当他运动的距位置超过了正负一百,控制器呢就会自动的让这个轴零减速停止。 在下面是位置相关的参数, d pose 的话呢,表示的是控制器发出的指令位置, m pose 呢是控制器检测到的实际位置, encoder 呢是编码器反馈的数值。安德木是这一条指令要运动到的目标位置,里面呢,表示的是剩余 多少没有执行完,但我们要控制一个轴进行运动,我们只需要做最简单的单位的设定,速度,加速度,减速度的设定, 然后以及相关的纤维的设定,我们就可以通过运动指令让轴进行运动了。比如我们给予一个轴正转的动作, 我们能够看到轴龄的 dpos 在不断的增加,同时在下面 m type 里面显示 forward。 m type 表示的是木屋 type, 当前这个轴正在执行的运动直列 n type 表示的是 next type, 就是下一条指令要执行的内容。上面我们看到当 dpos 超 过一百以后,指令被自动的取消掉了,是因为我们有设置的 fs 类美特生效了,如果我们想要让软件纤维不生效,只需要把它设置的比 repeat distance 重复距离大就可以了。万人指的话呢,就是这个指。 axis theaters 表示的是轴的状态,当有任何的报警产生的时候,在这里都会有红色的字母大写表示相对应的状态,比如 碰到了反向的软件线位,他会有一个大写的字母 r。 软件线位五表示的是我们使用的输入点硬物作为 软件纤维,如果不使用的话,我们把它设置为负一就可以了。 当我们给予一个木物质灵,比如木木一百 xs 零,让周灵运动一百的距离,我们能够看到 depos 呢,在不断的变大, 然后安的目表示的是这一条指令要运动到的目标位置是二百零。一人面的话呢,表示的就是他当前还有剩余多少的距离没有走完。 在左上角呢,会有一个按钮显示所有的参数,在这个列表里面默认显示的呢是最常用的参数。在这个 隐藏参数里面呢,还有很多其他的不不常用的参数,我们可以进行勾选,比如相对应的点动速度,这可的大小, 或者一些机器人控制相关的参数等等,我们可以根据自己的实际需要进行勾选。 在这里呢,我们需要注意的一点是,周三数呢,都是断停不保存的,当我们需要对周进行配置的时候,我们可以在周三数里面进行设置。 设置好以后,我们可以通过控制器的一个功能进行一个保存,我们可以在 project 下来菜单选择 modify stat up program, 选择轴的参数, 在这里呢,我们可以点击选择轴,比如我们刚有设置的轴零轴一, 然后在右边呢,我们可以选择需要保存的参数,默认的话呢是保存这些常用的参 单数,当点击 ok 以后,它会自动的生成一个相对应的大踏板程序,在这个程序里面呢,就包含了我们刚才所要保存的所有的参数,同样呢,我们也可以手动的在这里输入我们想要保存的参数。 以上呢,就是本期视频的主要内容,为大家介绍常用的周参数。
20埃斯顿自动化 03:33查看AI文稿AI文稿
03:33查看AI文稿AI文稿大家好,本期视频为大家介绍控制一个电机运动所需要的最基础的周三数。我们可以通过工具栏当中的周三数打开周三数列表。 在周三数列表当中我们能够看到有很多的参数,如果我们要控制一个电机进行运动,我们所需要设置的有几个必须的参数。第一个是 attab, 表示我们的控制模式。 一般来讲,我们当前使用最多的总线模式是不需要去对 apec 进行修改的,他会默认的识别到我们的位置模式。 第二个是用户单位 unates, unis 的话呢,表示的是我们用户希望在编程的时候所控制的单位,这个地方呢,我们就可以将 unis 设定为我们所要设定的一个单位所对应的脉冲数。比如我们 要设定优内斯的单位为毫米,那我们就可以在这里将优内斯设置为一毫米所对应的脉冲数。第三个呢,是我们要设置我们的电机所运行的速度,以及我们电机所运行时的加速度和减速度, 还需要设置的呢。还有一个是 f e limit, f e limit 指的是对跟踪偏差进行的限定,当我们的跟踪偏差超过了我们的设定值以后,控制器就会产生一个报警, 因为目前大多数使用的都是总线四幅,而总线四幅呢的编码器位数又相对来讲会更高一些,我们默认的 f e 内面的值会偏小,如果我们没有将 f e 内面的设到一个比较合适的值,可能电机刚刚开始动作就产生了跟踪偏差,超限的一个报警。我们的这个跟踪 偏差指的就是 d pose 指令位置和 mpose 实际位置之间的差值。在我们的这个周参数表里面,我们也能够看到有一个参数叫做 fe, 就显示的是当前实时的跟踪偏差的值。 还有一个参数我们需要设置的呢是 solo, solo 表示的是我们的是开环控制还是闭环控制。对于传统的脉冲控制来讲,这个 solo 我们是可以不用设置的,但对于总线控制以及模拟量控制,我们都需要将 solo 设置为一,表示的是闭环的控制。 最后一个我们需要设置的地方呢,就是使能,当我们点下这个按钮,就表示的是控制器使能,当我们使能以后,我们才可以对电机发出我们的控制指令,比如位置指令或者是速度指令。我们可以在周三数表当中呢对参数进行设定,比如我们将 usb 改为一千, 或者呢我们可以在程序当中进行设定,比如我们控制轴零修改,用内思等于一千,速度等于十,加速度等于一百。 这里我们的加减速度都是指的是单位每平方秒的一个物理上的加减速的意义,而不是指的是加减速时间。然后呢,我们需要设置 f e limit 十个单位,在最后设置 solo 等于一,当我们设置好这些基础的周三数以后,我们给予 wdog 保持 dog 等于二,表示是能打开。 当我们把这些参数都设置好了以后,我们就可以给予运动指令来控制电机的运行了。比如我们给予一个正转的直令,让电机进行一个正转,这个时候我们观察电机,就能够看到电机 会有一个实时的正转的动作。以上就是本期视频的主要内容,为大家介绍要控制一个电机转起来需要所设置的最少的参数。
52埃斯顿自动化 33:03
33:03 08:21查看AI文稿AI文稿
08:21查看AI文稿AI文稿这款是 s 盾的一 d 三 l 系列驱动器,二百伏交流供电四百瓦输出功率,支持一次开车通信,可以使用 usb 线蓝将电脑和驱动器连接,搭配的是 em 三 a 系列的四伏电机。 接下来进行简单的演示,先用 usb 把驱动器和电脑连接给驱动器上电, 然后打开软件, 我选择 usb 连接,搜索,弹出 名称,点击链接。 我们先找到调节,点击调节工具进行自动整定,工具 进行观量检测,点击确定,然后打开四伏,点击运行, 检测完成保存参数关闭,点击应用,点击运行整定, 选择在线自动一针,打开四伏,点击运行。 现在电机出现异响,属于正常现象, 我们这边显示整定结束,点击确认,然后选择保存参数,点击保存, 找到运行,点击照顾运行确定,我们设置好速度和时间的参数,打开私服,点击 正转,点击一下,点击正转一下,也可以持续点击 电机反转,电机反转,持续反转, 关闭师傅,然后运行,找到程序, 你先点击确定,我们设置好 参数,选择正转的十圈,反转十圈,然后点击应用,打开私服,然后我们点击运行,看到点击正转十圈,反转十圈, 嗯,停止。接下来进行离线演示,我们把 usb 拔掉, 打开 s 蹲的面板,有四个按钮, 第一个按钮切换模式, 我们找到 f n, 然后按第二个或第三个按钮,找到功能码, f n 零幺七,这个是四整定工具,按顿第四个按钮, 然后再按第一个,点击自动整,点 好,等待转定成功后出现摁的,然后我们返回功能码,找到零, 找到零零二, fn 零零二,然后点击第四个按钮,这个进行的是这个 电动模式,然后点击第一个按钮,通电运行,然后点第二个按钮,是正转电动,也可以持续转动,然后第 三个按钮是反转点动,然后持续按动,持续转动,我们断点,然后返回功能码, 找到功能码 f 零幺八, 点击确认第四个按钮,然后点第一个按钮,这是根据我们设置的参数进行了程序运动, 也是正转十下,反转十下,按第四个按钮,直接返回功能码,好,演示结束。
69北京精卓信 05:27查看AI文稿AI文稿
05:27查看AI文稿AI文稿大家好,本期视频为大家介绍最有软件的离线编程以及工程的创建。 在我们软件下载安装好以后,打开是我们这样子的一个界面,在上面菜单栏第二个 ctrl 了下来,菜单里面包含了控制器的连接选项以及连接的设置。当我们第一次打开这个软件的时候呢,我们需要先点击看他成 citing 进行连接的设置。如果我们手头有实际的控制器,需要连接到实际的控制器,我们可以选择第一个伊泽奈特的这个选项, 然后在 ip 地址这里呢输入我们要连接的目标控制器的 ip 地址。绝大多数催欧的 控制器都会有一个 lcd 显示屏,在显示屏上面刚上电的时候或者是插拔网线的时候都会有 ip 地址的显示, 我们输入控制器显示的 ip 地址就可以了,所有控制器出场默认的 ip 地址呢是幺九二点幺六八点零点二五零。如果我们手边没有实际的控制器,我们可以选择最下面的 cme later 来进行仿真一线的编程仿真工作。 当我们选择下面的 cm later 以后,我们可以直接点击 apply and connect, 这个时候他就会创建出来一个虚拟的仿真的控制器,型号呢是 mc 四百。然后在连接的时候呢,我们有提供三种连接方式, 最下面的一种呢是 connect in direct mode 直列模式,在直列模式呢,我们提供了右侧的这样子一个命令行,在这个命令行里面,我们可以进行单行指令的调试工作,比如说我们可以通过命令行对变量进行设置, 或者对变量进行查询,我们也可以对我们的输入输出进行一个操作,或者呢我们可以对轴的运动指令或者是轴的参数进行设置,比如速度等于十。 第二种方式呢是 connecting tool mode 工具模式,在工具模式下面,我们可以使用我们软件所提供的所有的工具,比如说 刚才的命令调试行,或者是周参数的工具 来进行轴的参数的设置,或者是 l 查看的工具来查看我们的 l 的状态,或者呢是莫里梁查看工具以及 vr 查看工具等等。在工具模式下面呢,我们不能对程序进行编辑以及修改。 最上面一个呢,也是我们最常用的 connect in syncomo 的同步模式,同步模式呢,就可以使用我们软件所提供的所有的功能,也可以对程序呢进行创建,编辑修改。 当我们点击连接到同步模式以后,他跳出来的这样子一个对话框,这个对话框呢是让我们进行一个选择,左边呢显示的是控制 器的图标,也就是下面呢是控制器里面当前保存的程序,右边呢是电脑里面当前使用的程序。在这里我们可以进行选择,是把控制器里面的程序上载掉到电脑里, 或者是把电脑上的程序下载到控制器里,我们也可以选择新建一个程序, 然后进行对比,把新建的程序呢下载到控制器里, 这样子呢,我们就创建好了一个新的工程,然后连接到了我们的仿真器 mp 四百上面。如果我们连接的是实际控制器,我们除了选择 奈特选项以外,我们还需要对电脑的本地连接的 ip 地址进行一个修改,修改到和控制器同一个网络当中,我们可以选择右键单机我们以太网的属性, 然后将我们的 ip 地址改为和控制器同一个网段的,前面三位是相同的,最后一位是不同的,这样子我们就可以进行实际控制器的连接。 当我们连接好控制器以后,我们可以双击 programs 这里进行程序的创建。在创建程序的时候呢,他有很多的选择,我们可以先选择 basic program, 这样子我们就创建好了我们的第一个 程序,可以对程序进行编写调试的工作。 或者呢,我们可以单击右键选择新键,以及在菜单栏当中 flprogram, 再来菜单选择六进行新键。以上就是本期视频的主要内容,为大家介绍仿真器的连接以及程序的创建。
124埃斯顿自动化 00:59查看AI文稿AI文稿
00:59查看AI文稿AI文稿c o p d o 配置视力 第一步,新建 ecx ten 短键第二步,导入阿斯顿 e d 三 l 四伏 xml 文件, 选择位置控制,点下一步,再点下一步,添加接收 pdo, 然后添加发送 pdo 初始化指令,显示了 sdo 初始化命令列表, 这样就完成啦。在 pdo 配置中,我们可以看到已经配置好的 pdo。
81伺服与运动控制 04:19查看AI文稿AI文稿
04:19查看AI文稿AI文稿从三月底到端午之前,小吃的作品大部分都是人工智能相关的上市公司,最近开始讲关于居身智能相关的上市公司, 相信大家其实也明白什么意思,不明白的评论区留言,像无人驾驶汽车、机器人之类的都属于居身智能。 评论区里面我会给大家说一下人工智能和居身智能的区别,那么今天就来了解一下国内第一工业机器人品牌上市公司埃斯顿。 埃斯顿成立于一九九三年,以金属成型机床、数控系统起家,又逐渐拓展至电液四伏系统和交流四伏系统。公司于二零一一年开始研发机器人本体, 二零一五年上市。目前公司成长为国内第一工业机器人品牌。公司主营业务为机器人和核心零部件两块, 其中包含机器人本体与集成解决方案、数控系统、四服系统和运控系统等。二零二二年,公司机器人销量一点七万台,是战率百分之六,居国产机器人首位。公司股权较为集中,公司实际控制人为现任董事长吴波,共持有公司百分之四十一点一股权。 二级市场埃斯顿最新股东户数五点六八万户,高于行业平均水平,户均持有流通股份一点三八万股,户均流通市值三十八点七四万元。接下来我们来看看公司的财务情况。二零一六到二零二二年,公司营收增速达百分之三十三点七, 二零二三年一季度授予光伏等新能源行业扩产需求旺盛,公司实现营收九点九亿元,同比增长百分之二十二点八。机器人是公司营收的主要来源,收入 占比从二零一五年百分之十六增长至二零二二年百分之七十四。二零一到二零二二年公司净利润增速为百分之九点四,由于密集收购及研发投入较大,导致费用潜质净利增速偏低,二零二二年净利润增速出现增长,或许成为公司净利增长拐点。 毛利率方面,公司领先同行,由于规模效应以及公司产品定位高端,公司竞争能力增强,这一点具有稀缺性。 多次并购以及销售投入也使得公司经营费用连年增长,二零二二年公司费用率为百分之二十七点七,短期内很难看到改观。具体业务方面,我们主要还是来聊一下埃斯顿的机器人。 机器人是当代工业自动化的核心载体,在各行业转型的推动下,全球机器人应用场景不断拓宽,推动机器人产业 持续繁荣。预计二零二四年全球市场规模有望达到四千六百二十亿元。根据应用领域不同,机器人可分为工业机器人、服务机器人、特种机器人以及其他机器人。 二零二一年,中国机器人市场规模达到九百九十四亿元,其中工业机器人五百二十五亿元,占比百分之五十三。 与人相比,机器人不光能在高危环境中生产,同时还更稳更精,能够大幅提高工业效率,替代人工为长期趋势。纵观全球机器人市场,长期处于垄断地位的分别是日本的发纳科和安川电机,以及瑞士的 rbb、 德国的库卡, 而我国龙头厂家埃斯顿机器人销量试战率仅为百分之六。在我国, scary 机器人已经初步完成国产替代,竞争较为激烈。但在六周 机器人方面,依旧是国外巨头主导,埃斯顿一半以上业务为六轴机器人,竞争格局较好,在工业机器人领域具备稀缺性。 目前埃斯顿主要对标企业是国外巨头范纳克,与法纳克相比,两者都具有完整产业链优势。同时,埃斯顿在光伏、锂电领域优势更加明显。与法纳克借助汽车产业腾飞相同,埃斯顿则是借助国内光伏、锂电等新能源行业的迅速发展实现飞跃。 光伏方面,公司深度绑定金澳、金科、龙机等光伏龙头,在光伏组建、装配工序是占率达百分之九十。锂电方面,埃斯顿进入宁德时代,意为理能等头部客户供应商。 中长期来看,机器替人为大势所趋。目前国内工业机器人主要依赖进口,密度与发达国家相比有较大提升空间。埃斯顿机器人产业链完备,龙头地位稳固,虽产能释放,市场份额持续提升,业绩有望稳步增长。
91大圣财经汇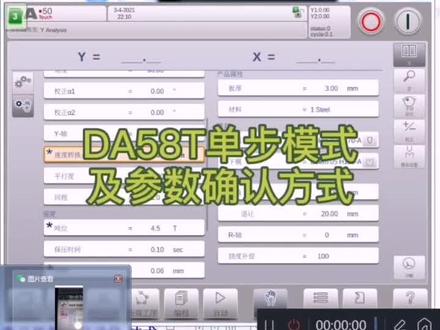 02:57查看AI文稿AI文稿
02:57查看AI文稿AI文稿大家好啊,我是爱神小贾啊,今天就前面朋友发的一张报警代码 呃,给大家做一个回答复,并且给大家分享一下子。之前他发了一个英文的报警,这是一个出口的机床五八 t, 然后上面显示 steve model elabor, please press star to to cantee。 翻译成我们中文就是单部模式使人,然后请按去启动键与继续执行。 另外还发了一张照片,询问了一下这两个按钮的区别有什么含义,今天就这个给大家做一个解释。第一个单步模式是在多步程序里面才有 啊,这个是指在多部程序里面,我们可以看到这边执行的时候会下面会有一个单位模式,如果是否就是我们正常的自动执行每一步 每步的自动切换,如果我打开死人他这第一步,假如是第一步他执行完了以后,他会自动停止,然后你要跳到第二步就要重新按启动键 啊,呃才能继续执行。这就是单部模式,就是一步一步的来执行啊。这另外这个跟那相关的还有一个参数, 在我们设置里面的产品设置里面,这个单部模式是否自动换布,如果选择失效,就是他一步执行完不自动换到下一步,要离手动去切换。如果是选择是试,他就自动换到下一步,但是他会跳到停止,这时你只要按起中间就可以自动执行下一步了。 这个就是我们的单部模式的一个使用,另外呢有一个参这个按钮啊,这只有在五八和六六七上面,加油,这个呢代表是自动确认参数,一个参数的自动确认是 这个是在参数的一个手中确认,这是指变成界面,变成界面,其实当我们修改某些参数的时候,会引起其他参数的一些变化,比如说这个 折弯的板厚会对压力啊,深度都会有影响,那比如说我尝试下修改,修改成一点五毫米,大家可以先记住啊,这个点完整深度是幺幺三点五二,我改成一点五以后, 他仍然是幺幺五三点五,但这边多了一个新号,代表这个参数会发生改变,需要你手中确认。这时候我到了这边,你看这个时候实际计算值是幺幺五点五七,那我只要按个确认键就可以确认了。那这个如果我是一直只要只选择这个齿轮呢?那我这个 修改这个某个参数的时候,对他其他是产生影响的,这样会自动的切换,大家看这个 完整的深度是幺幺五点五七,那我把这边改成三,他就自动切换到幺幺三点五二了啊,并且旁边会有一个感叹号的提示,告诉你这些参数已经发生了改变啊。 呃,这个就是我对今天的这个问题的一个解答,希望对大家会有所帮助啊,谢谢大家,希望大家继续关注我的呃,抖音小视频啊,谢谢。
111JACK贾 03:59查看AI文稿AI文稿
03:59查看AI文稿AI文稿大家好,本期视频为大家介绍 mc kingpaker 文件的使用, 当我们在新建程序时,可以选择 mc configure file, mc configure 文件呢主要用于执行一些系统的参数的设置,这个文件在控制器上电过程当中会自动的被执行。 当我们新建好 mc k 分格文件以后,可以点击 click to enable editing 来进行编辑。 在这个下拉菜单里面,它包含了 mc 跟飞哥文件里面可以设置的所有的参数。一般常用的参数比如 attap 可以设置轴的类型,比如说设置轴零的 类型为四十三, 设置折一的类型为七十六。编码器反馈,同时我们也可以在后面添加他的注视。 还有比较长设置的包含 ip 地址,比如我们要将 ip 地址改为幺九二点幺六八点零点一百 或者奥特一字 cat, 对于一字 cat 网络商店是否自动处置化,我们可以将它修改为零,表示商店不不处置化,修改为一,表示商店执行一字 cat 的处置化动作, 以及一些其他的比如专用帽的控制四伏的模式, 对于总线四伏来讲,我们可以选择设置为零一二三分别表示位置模式,速度模式或者是扭矩模式以及 drive profile, 可以选择不同的 pdo 配置。 除了上面所有的设置以外呢,下面还包含了两个单独的设置, ip 的设置以及一字开头相关的设置。 ip 的设置呢,我们可以在上面所有的参数这里进行修改,也可以单独的在 ip 跟贝格瑞神这里进行修改,可以对他的 ip 地址,此网验码以及网关进行设置。当我们在这里设置好了 以后,他会在上面所有的三数那里呢再多出来,比如我们设置他的网关, 然后我们能够看到在这个所有参数里面,他就多了一个 ip get away 是我们刚才设置的值,在下面呢,还有一字开头相关的设置,我们可以在这里添加我们所需要的设置, 比如说轴的设置。刚才我们在所有参数里面对轴零和周一进行了模式的设置,我们可以添加更多的轴,比如说周二周三,然后对他的专用 mode 进行设定,或者对他专用 boy 进行设定。 在这边呢,我们也可以对他的网络的私服周期进行设定,默认的话呢是一千为秒, 也就是一毫秒,我们可以给他修改为五百微秒,然后在所有参数上面,我们能够看到他变了一个 solopierry 的为五百 修改的是四伏周期。这里需要注意的一件事情呢是当我们对 mc ctrl 有做过修改以后,左上角的控制机器数的菜单里面呢,他会有一个提示 说控制器要经过重启以后 mc 看飞哥才能剩下,因为 mc 看飞哥他是在上电过程当中来被执行的。以上就是本期视频的主要内容,主要介绍 mc 看飞哥的常用设置。
16埃斯顿自动化 00:50查看AI文稿AI文稿
00:50查看AI文稿AI文稿好,接下来我们看一下我们的通用设置, 通用设置界面我们有呃七个子界面,这里面分别是对,对应我们这个机器人的一些基本的一些参数的设置。首先我们来看一下基本设置,基本设置界面的话,它里面会显示我们机器人的一个型号,或者说是类型。类型啊, 你比方说我们命令机器人,他会显示我们一二一二六杠七三零啊,这个型号啊,下面是要设置我们的这个 机器人工作的时候他的实际的一个负载重量啊,以及我们在远程模式下他的一个呃执行的一个全局速度啊,都可以在我们的基本设置界面下进行设置。
6江帅 02:37
02:37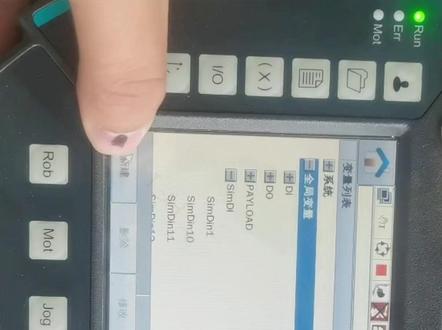 22:55
22:55
