mixly怎么增加其他开发板

粉丝1514获赞3379
相关视频
 02:55查看AI文稿AI文稿
02:55查看AI文稿AI文稿大家好,本期是米思琪入门教程。首先是下载安装开发工具,搜索并打开官网, 点击进入下载界面,复制提取码,打开下载链接, 选择完整版下载软件较大,耐心等待。 这是下载完解压后的文件夹,这是主界面,可以选择不同类型的开发版。 如果你是 arduino 开发版,请点击这里。如果你是 e s p 三十二开发版,请点击这里。我们 e s 三十二开发版举例,开始前,请先安装奇果派的插件,打开奇果 拍官网 资料文档, 找到米斯奇图形化编程文档, 找到插件下载地址,点击下载。 这是下载后的解压目录,提供了两个开发版的插件。回到米思琪,点击设置管理库, 本地导入,打开刚下载的插件文件夹,并选择正确的版本。 导入成功后,可看到左侧出现奇果派插件, 该插件主要封装了一些对硬件的操作,可以方便的控制电机和舵机等。我们打开一个视力文件,演示一下插件目录下,打开 example, 选择第七个视力远程遥感控制,打开后如视频所示,鼠标滚动可放大缩小, 按住鼠标可拖动界面 上方可选择模式查看或直接编辑代码。 最左侧是图形化程序选择区,直接拖到中间组合成代码逻辑,最右侧会自动生成代码。接下来我们把代码上传至开发板上,电脑插上开发板后, 右上角会多出一个串口,可重复拔叉,已确认是哪个串口,选择它并点击上传, 耐心等待编译和上传, 如果没错误,会提示上传成功。下一期我们会针对具体硬件做代码讲解,谢谢关注!
1607UselessMaker 26:55查看AI文稿AI文稿
26:55查看AI文稿AI文稿开发硬件环境啊,这节呢主要讲解这个主板的一些功能介绍,还有讲解啊传感器的介绍,配套的是阿三拓展版 主板,配到安上拓展板之后呢,就可以方便跟一些传感器的连接。这幅图片上看到的传感器呢,比较多, 因为不同套餐啊,所配套的传感器是不一样的,意思就说假如你买了入门套餐,可能只有前面十个左右, 买了初值套餐又增加了一部分传感器,买了高级套餐可能的传感器更多啊,就说不同套餐所配套的传感器不一样,这个 传感器后续呢都是可以升级的,我们还会开发更多的这个传感器,比如物联网 wifi 一些传感器,智能家居的一些传感器等等啊,所以我们这个教程呢,就说是最新版的教程,现在就说是二零 二零年或者是一年啊等等。这个新版的教程呢,我们会不断的增加课程的 计划啊,至少有一百节啊。这个米思琪爱上米思琪这个图形化编程视频教程, 大家可以直接搜索新奇刚米斯奇图形编程视频教程,就可以找到后续的这些课程进行学习了。这个拓展版学完之后呢,就说整个套餐套件学完之后呢,还推荐大 大家选配这个二九三 d 啊,这个驱动智能小车驱动版,可以直接升级成这个 wifi 智能小车,或者是这个之前小车啊,非常方便。 好,这个硬件开发环境呢,同学们呢,也可以参考一下刚才说的这个 jduno 唱歌机器人啊, 就说学完整个套件之后呢,可以选配一个这个驱动板,升级成这个两轮的两驱的这个智能小车也可以升级成这个四轮的这个智能小车, 也叫阿丢诺智能小车,或者是避障巡智蓝牙智能小车。其实呢都是后面大家需要心急才能学习 的一些这个产品。 idental 开发环境,硬件方面, ulr 三开发版 ideal 生态中包括多种开发版,传感器模块, r 三拓展版, r 三杠二九三 d 智能小车拓展版, 其中 realr 三呢,是最适合入门而且功能齐全,使用量最多的阿迪诺开发版,也就现在大家看到的这款 啊,丢了 ul r 三开发版或者是 a 最丢了 u l r 三开发版 arduino real 呢是一款机 hmi 三二八的卫衣控制器控制板,它有十四 四个数字输入输出引脚,其中六个可以用作 pwm 输出,六个模拟输入,十六兆金正时钟。 usb 连接电源孔, i c s p 接头,我复位按钮,只需要通过 usb 数据线连接电脑智能供电程序下载我数据通讯,在揭开版就比较方便啊。还有 jduno u r 三开发版 阿丢诺呢,开源公开开发环境,由于阿丢诺版的价格偏高,一般学生学学学姐建议采用 guino 开发版 学习编程,我使用百分之百兼容国产 aj 丢诺也是不错的选择,前面也介绍过了他的驱动安装,还有他的主要 要区别,主要区别就是说一个是芯片,呃,封装啊,这个 redunal r r 三出版呢,采用最先进的技术贴片技术进行封装的,所以它稳定性呢比较高。 还有这个 c h 三四零这个 usb 转串口驱动也是采用专业级的这个芯片,它兼容 windows 系列,这个比较完美一点啊,所以如果有些老电脑的或者新电脑的,建议用这款 gduno uf 三 这个开发版,因为他是百分之百兼容啊,这个啊,刘诺开发版的, 再看一下这个硬件配置方面啊,这个芯片呢,采用这个 atm max 三二八,工作电压呢是五伏, 输电压呢七到十二伏,他的范围呢是六到二十伏啊,这个指的什么?指的在经过这一块啊,输电压六到十二伏啊,或者这一块 一般呢,我们直接用 usb 口五伏供电就可以了,它的数字 i 口十四路啊,其中六路周围 p w 输出。 p w 是什么?它是数字量的 这个波形啊,变成母女量的一种表示方法,也就说 因为这个银角,数字银角它只有高低电瓶两种状态。 p w m 呢,就是利用了高低电瓶所占的这个波形不同啊,输出的一种 模拟量,它的值的零到二五五啊,在后面呢,用的比较多啊,比如一个呼吸灯,或者是控制电机的速度啊,都是用到这个 p w m 的,我们也有两节课程专门讲解它, 还一个模拟输入啊,模拟输入什么模拟输入呢?是零到二五五或者零到幺零二三,专门接一些模拟传感器的,上面是数字 icon, 专门接数字传感器。 大家知道一点,数字传感器可以接到母女口,但是母女传感器呢,是不能接到数字口上的,因为母女传感器它的值的范围比较广,零到二五或者幺零二三。数字传感器 有两种状态,零幺啊,它的电流啊,还有这个 fas, 三十二 k, 两 k 一匹浪,一 k 始终十六兆啊,这个呢,就是它的硬件 电源方面呢,可以通过三种方式供电,而使自动选择供电方式,可以用外部直流电源通过电源做供电,这个一般都不用 电池连接电源连接器的简历 vip 引奖,这个呢,也很少用。第三个呢,用的比较多了, usb 口直接供电,就说把这个 usb 插 usb 线插到这个口上方口就可以给这个板子供电了。 这个银角啊,这个 v i n 呢,就说当外部直流电源接入电源插座的时候呢,可以通过 v i n 向外部供电,也可以通过持久向 v i o 直接供电。 v i n 有时忽略 就说意思,这个影响呢,这个不是很重要,很少用到五伏,通过稳压器或者 usb 的五伏电压为月欧上的五伏芯片供电。三点三伏啊,通过稳压器产生三点三伏电压,最大驱动电流五十 m i 减 d 呢,就是地线。 这个存储器呢,它有一百二啊,三十八 k 的 plus, 其中零点五 k 用于这个启动,同时还有两 k 的 s 量和一 k 的一 plun, 所以他编程的程序呢,基本上都可以上传到这个芯片上啊,除了除了很很大量的容量很大的程序,一般的学习程序呢,都可以 看这输入输出了,十四路输入输出口,这个口的电压是五伏,支持零幺啊,两种状态,每一路能输出,我接入最大电流为四十 m, 可以驱动发光管,驱动蜂鸣器, 他每一路呢配置了二十到五十 k 的这个欧姆,内部上的电阻默认呢是不连接的,储水之外呢,有时引脚有特定的功能啊,与这个串口 零幺啊, is 是零 t s 是一,与内部 it 麦这个 v j c h 三四零芯片相连,提供 t t l 这个电压水平创考接触信号。 这个 gduno 呢,是三四零专业性驱动芯片,那 duno 呢,是这个 atmei 八 u 二是虚拟芯片啊, 外部中断,二跟三号触发中断,引脚可设置上行源下降源,同时触发这个中断呢,大家如果不了解可以到搜索一下未经电子中断这个知名教程。 中断呢,就说程序在运行过程当中突然有其他事情发生,打断当前的程, 去执行这个中断后的程序,执行完中断程序之后又回到主程序,这个第二跟三这两个引脚呢,可以产生这个怪物中断。 还有一个脉冲宽度调至 pdm, 三五六九十十一,提供六路八位 pdm 输出。八位呢,就说是零到二五五,它可以输出可变的一些值,也可以理解成电压零到五伏。 这个呢,我们后续有专门的讲解。这个 pda 边还有什么作用,可以控制灯的亮面,可以风控制风扇的转速,可以控制智能小车的速度。还有一个 spi 啊,这个呢,就是 spi 通讯接口十十一十二十三, led 显示,这个呢,就是在板子上啊,专门测试 led 的保留接口,输出高时点亮 led 反击,输出低时直面。 还有六路的母女输入零到 a 零的 a 五好,这个呢,就说每一路具有十位的分辨率啊,十位就说有幺零二四个不同的值, 输入默认信号范围零到五伏,可以通过这个 a l e f 调整输入上限。除此之外,有时引脚有特定功能与这个 t w i 接口 叫做 s d i s l, 这个呢也叫支持通讯接口,它是兼容 iphone c 总线, iphone c 总线在这个 把电脑主板上应用也是非常广泛的,还有什么好处呢?可以节省 i 口,可以节省一些接线, i 方式总线呢可以兼容很多种,这个 i 方式模块直接接在一两根总线上进行传输数据的, 还有一个是 a l e f 啊,模拟输入信号参考电压啊, est 啊,复位单片及复位。好,这个呢就是输入输出啊,一些赢角,大家知道这个数字口,模拟口还有模拟输入 bm, 这是接口就可以了。通讯接口啊,串口, atm i 三二八内置的这个串口呢,可以通过数字口零 s e t s 云外部实现创口程序,你卖幺六 u 二或者是社区三四零芯片呢,可以访问数字口,实现 usb 上的虚拟创口啊, 还有一个是 t w i 兼容 iphone c 接口,还有一个 spi 接口,这些接口到底有什么用? 在后面讲到液晶屏的时候呢,用到这个 iphone c 接口直接插上去就可以用了,而且 spi 接口一些 sd 卡啊,或者是其他的一些外设,只要采用就是 iphone c 接口, spi 接口都可以接到这个主板上进行拓展学习啊,非常方便。这个呢就是通讯接口方面的 好,这个版怎么稍写程序呢啊,它丢诺元欧或者这丢诺元欧啊,它的芯片呢,已经卖三二八,已经内置了这个内置的一个 b o l k 的 b o o t 的这个程序啊,日期呢,可以通过 up 软件直接下载程序到 reo 中, 可以通过元欧上的 icsp 啊,直接下载程序到这个芯片上,也可以通过这个 dfu 工具升级。现在刷程序呢,我们直接啊利用这个阿迪诺 id 软件上 的一个串口上传程序就可以了,直接上传程序,如果采用的是图形植物编程,这个 sar 编程 scratch 也可以采用串口。 米西奇软件也可以直接采用上口,这个创口上传外是阿金 blog 软件,他都是调用我们的 id 软件啊,直接在创口上扫写程序或者上传程序。 好,要注意的一些事项啊,有一个保险丝啊,对电路起到保护作用, 电流超过五十 ma, 未断开 usb 连接,这个什么意思呢?在这里啊,这个呢就是保险系啊,这电流太大了,它会自动断开。 这个板也是啊,在这里也有的这个就是,所以这个供电电轮电流呢,不能太大,太大了可能会损损坏这个板子,就说模块的电流或者供电的电流。 arduino 要提供了自动复位设置,通过组织复位,这样通过 arduino 软件在在程序啊下载, 下载程序到 ul 软件就可以自动复位,不需要恢复。比如说不要按这个复位啊,在板子上写有这个 s t 走这个,这个就是复位。有时呢我们程序要重启, 在重新运动,运动的时候呢,我们就可以按下这个复位啊,这两个是复位。 好,这个注意要点啊,就这两这几点,刚才说了我们 adule 这个硬件,包括了一些 adule 传感器,这个传感器有很多啊,在后面的学习过程当中啊, 基本上呢都是讲解一些传感器的应用,输入传感器,输出传感器,开关传感器,数据传感器,模拟传感器等等等等, 它兼容阿丢 block 传感器套件。阿丢 block 呢是什么?它是一个图形开发软件,基本上在广东浙江这一代啊,这个教育局推荐的一个软件,它是基 ideal id 这个软件上开发的一个插件,它支持图形编程,中文编程,很受到学生的欢迎,所以广东省教育局呢,推荐的一个 video block 这个图形化编程软件, 还一个是米斯奇爱上米斯奇,米斯奇传感器套件,米斯奇呢是这个大学教授推出的一个图形编程软件, 他呢就比较完善一点,支持的这个传感器,支持的这个膜害比较多,他有专业专业的团队去升级去维护。所以呢,这个老师推荐大家采用米思奇啊这个图形软件进行 学习,因为后续会推出更多的传感器,他支持都可以完美兼容,完美支持,学习起来呢也是比较方便, 不然每每一年都会更新。还有一个后面这个丝瓜传感器套件,这是外国这个开源软件,丝瓜是集多媒体互动的一款。这个小学生中学生的图形 编程软件,用的人呢也是比较多,他特别适合于这个小学中学, 他不用传感器也可以进行编程学习。但到了一定的时候啊,建议大家如果学习 spa 少儿编程呢,也可以采用我们的 呃传感器套件进行学习,只要有了传感器套件,有了这些这个模块之后呢,你的产品才能悟动起来,你才能感知到这个世界上有什么变化, 配再配合这个多媒体这个进行学习,效果也很好。魏晋仓库推出的这个 jduno 系列传感器套件呢, 是完全针对中小学生学习能力自主研发的最丢落啊丢落机型套件是少年创课精英工程师,结合众多一线老师需求,倾力五年打造而成 产品,同时满足大班教学、社团教学、参加竞赛三方面的需求,也可以大家自学啊。所以我们的软件支持的非常多, 支持了这个四种编程软件,支持了一种 c 源编程软件,其实这个 spa 这个下编程这个软件呢,衍生了很多这个国内的一些编程软件,比这个未编程 编程猫或者是小猫编程等等,其实就是基这个 scruss 开源的软件,把这个名字修改一下,改成啊某某某软件, 把他的一些图片改一下,其实他内核都是采用 scar 这个开源的软件去修改的。 这个软件呢,有二点零的,有三点零的版本啊,他都是互相兼容的好。最后呢,这我们的编程 玩具里面呢,有一个 gduno 主板啊,这个主板大家都非常熟悉了,前面教大家怎么安装了驱动啊,大家就这里就不多讲了,也 有两种啊,就是说看你采购的是哪一种,就是 jidulo 主板,还有一种 adulo 主板,他们都是物商兼容的,就说如果是苹果电脑,可以采用 adulo 这个主板,如果是 windows 电脑呢,建议大家采用 jduno 主板。 本教程配套的 u l 拓展版, r 三拓展版,这个拓展版在前面也介绍过了啊,就说把它插到我们的这丢了主板或者啊丢了主板上面之后呢,可以把啊这些 air 口引脚啊全部把它拓展出来,就说方便我们接我们的传感器,只要一 天线就把传感器连接在我们的主板上进行学习,还有刚才说的这个 spi 通讯接口把它接出来了,还有这个特点呢, 多了这一个啊,蓝牙 wifi 接口,这个有什么用呢?可以用这个蓝牙来控制这个灯,控制智能小车, 控制一下互联网等等,特别是 wifi 这个接口特别有用,还有 sd 卡的一个接口, iphone c 啊等等, iphone c 这里呢还有一个超声波啊接口也把它接到这里了啊,好,这个是阿三拓展版,如果你选配的是传感器套件的,基本上有配套的这个拓展 板呢,这个功能啊,就说支持啊,控制器型号,机器人控制主板就是我们的阿丢诺,而且这丢诺主板 ico 呢全部引出来了啊。 另外呢这有一个 r 三二九三 d 电子驱动模块叫 arduino 智能小车驱动版,这个版呢我们在后续学完传感器套件的时候呢,一个感兴趣呢,可以到官方网站去采购升级, 大家观察啊,这是爱口饮酒呢,也全部饮出来的,零到十三这里模拟口的饮酒也是全部饮出来的,我们讲课的时候呢,就用这种啊 i o 拓展板进行讲课,一个大家选配的是这种阿三杠二楼二九三 d 拓展版呢,也可以兼容学习,只是呢位置稍微有一点改变,这个版主要是多了一个二九三 d 这个驱动膜害,这个呢就说相当于驱动器前面讲机器人的时候 就是啊,头是主板啊,就这块主板还有传感器, 眼睛啊,传感器,我们后针后面再讲一个驱动器,执行器,驱动器呢,就说是二九三 d 这个芯片了,执行器呢就是电机啊,我们这里可以接这个电机。 好,这个呢就是阿三二九三 d 这个电子驱动模块,他可以配套这丢了创客机器人专用这种小车底盘来组成一台这个巡制小车,避障小车,而且是创客 编程机器人啊,都多增加这个驱动板,还有这个小车底盘啊,就可以 新集成这个智能小车机器人了。这些巡记传感器呢,后面都会跟大家去讲解安装在这个底盘上,还有一些 b 站传感器,这个是超声波传感器, 还有一种呢是二三二九八 p 的电机驱动模块,这个模块有什么区别呢?主要是这个芯片不一样,这个驱动器啊,也就说驱动器他就的功率比较大,可以驱动四个电机啊,接四个电机都可以, 也是跟也是兼容我们前面的这个二九三 d 的,二九三 d 呢,一般做两驱两轮的智能小车。 二九八 p 呢,一般做四轮的这个智能小车啊,这接口啊是兼容的,这个数字口全部接出来,魔力口全部接出来, 还有电机啊,驱动可以接四个,四个等级的电机也接出来,电源还集成了一些稳压芯片,开关电源啊,其他的引脚一样啊,这个 wifi, 蓝牙,还有模拟 ico, iphone c, 超声波,这个 外部稍写程序的接口,电源啊,这个电源接口还有一个数码管的接口,全部已经在这里接出来了,所以大家后续升级的时候呢,可以升级成一台 wifi 智能小车,四人的可以升级成这个视频小车,蓝牙小车 或者避障小车,巡记小车都可以啊,只要你跟着徐高老师老师学习完成这些传感器套件之后呢,你就可以升级你的产品了。 好总结一下啊,这件主要讲了 adono 硬件开发环境,包括这个主板,它的一些接口,还有这个拓展版 r 三啊,方便我们接传感器, 兼容这个数据传感器,模拟传感器, iphone c s p i 通讯等等。 最后呢介绍了这个 r 三,这个杠二九三 d 啊,这个智能小车的这个驱动版,学习完成这个套 线之后呢,就可以直接升级了,好布置一下作业啊,如何操作 adono 开发版的 alco, 大家先思考一下,现在软件硬件啊,驱动我们都学安装好了,都学习完了我们就进入啊,实际操作怎样去控制或者接检测啊,这个刘诺主板上面的 l 口的一些功能 提示一下啊, ico 呢,零幺两种状态,一呢是五伏,零呢是零伏,也就说默认的时候呢是是什么五伏或者零伏, 如果是母女口呢是零到二五五啊, p 到 b m。 这个时候是 p 到 b m 啊,母女口呢就说是,这是八位十位 模拟呢是零到幺零二四啊,一般呢是幺零二三。 这直播显示出来啊,好,这个提示一下啊。
36星慈光 01:12查看AI文稿AI文稿
01:12查看AI文稿AI文稿搞了两块 miss 七的 miss go ce, 我们可以看一下这两块小板。地藏的摆米 mis 里还是很精致的啊, 太小了,这这这板子太小了,它是基于国产椰丝皮三二的啊,整个这个板子上也集成了很多的资源传感器啊,输出呀也不少。 当然我这个只是这个基础版,他还可以加那个扩展版一些外置的模块。那个我没有采购。 嗯,先拿这个先玩一玩吧。好,我们看这个是二点零版本的米斯奇软件啊,那么在这个里边有 miss go ce, 我们打开它之后就进入到这个编程界面。嗯,那么它在里边有这个板仔的传感器, 班仔的执行显示啊。嗯,看资源还是挺多的,挺丰富的,回头我们玩一玩,看一看。
40小糖科创 04:49查看AI文稿AI文稿
04:49查看AI文稿AI文稿这个板子呢,所有的端口,比如正负极红正黑负在这二点五四的接口。然后这边呢是十三标准的板颤标呢,十三,十五。然后这两个是电机 m 一, m 二,那分别是用十四、十六和十十二来驱动的 啊。这边呢是零号端口和三号端口,这边是四和五。那这几个什么意思? smart 看这个是可以用手机给他来配网也,迈克佩森也是可以给他编程的,也可以用这种技术,外谱, rap 这种技术来给他在线编程都是可以的 啊。刚才还有一个就是四和五。这个 iphone c 接口可以直接 oled 啊,超声波呀,什么只要是四星的,或者是模拟一个创口啊,软创口啊,都可以。这个说完之后,咱们就继续 说这根线太不 c 的线连上之后,插在电脑的任意一个接口,那他是一个 ch 三四零,三四零驱动的。所以那个驱动要先装好。装驱动的方法我就不用说了,网上很多啊。插到 usb 口之后。好, 那我先说一下,用 mix 的给他编成这是一个空白的,然后把这个库删掉。在你没有这个库的情况下,你需要先导入这个库,因为想控制电机的话,一定要用库,你也可以自己做。但是呢,这个有一个小问题,就是啊,这个控制器 这个端口就是这个端口,是十号端口。怎么看的是十号端口的呢?是这样看的,就是十号端口在这 那但是呢,这个他们的这个库里面,十号端口默认是没有的,因为他默认是接到那个 spi 上的,所以没有十号端口。那所以在这呢,我是重新定义了一下,怎么定义呢?就导入库, 本地导入,我在桌面上已经有了,就是这个库,可以随时找我要的。这个还有拍森 kit。 这个好,直接导入。导入之后我这有一个直接控制电机的,就这主控麦克。拍森 kit 里面有两个, 一个 m 一,一个 m 二。比如你选 m 一,那就 m 一,那给他一个速度,比如给他一个两百的速度,那这个给他一个也两百的速度,或者中段反段都可以。那这个这样的话就控制个小车了嘛。好在这是正在上传,因为他用的波特 率好像是五幺二零零的,挺慢。其实如果是用那个 dnad, 可以把波特率给调整。米米斯米斯奇,这个他是直接封装好了就调不了,可能在后台也能调,但是我不知道在哪 好。上传完之后,那这个呢?是没有给他用供电的东西,直接是五伏供电啊。如果是接那个,那个电池也是用电池来供电的。好,这边电的这个在旋转啊。这边也是, 对吧。这两个都在选择对电机不要选错了。电机是主控 maxpassion 的,这个 k 是这个 e ez k 的, e z k 的是针对的那个方板子大一点的啊。这里面其他的没什么用,就用不着它就不用用了,然后停止所有电机也是可以用的 啊。这个就不说了。然后再说一下我的绑定,然后再说一下这个 io 口。其实说这么多主要是为了说明他的电机和输入输出是可以使用就行了。那输入输出嘛,输出嘛,那就是点亮一个灯,控制一个电机, 在这他每一个管角是都可以做模拟输出的,所以不用担心他的 pwm 的问题。在这呢,他是一个二管角,然后开关开关就行了,高低高低,然后给他一个延时, 给他找一个延时,那就能正常他的运行。在这我特别说明一下,就是如果是用有线下载的时候,就是就是有数据线下载的时候, 这边的这个零号端口和三号端口,在这零号端口和三号端口尽量不使用。为什么呢?零号端口是他的系统的什么位可按关掉,那三号端口呢?是他的那个 usb 转创口的那个创口关掉。所以呢,如果用它用到输入,就是这边接输入设备了,那会影响到他的高低电瓶,所以尽量不使用它。 但是无限编程的时候,待会我说另外一种方法的时候,那就没有这个限制了,这些都无所谓,这些是都可以使用的,就这两个很特殊。好,那这个过去了。
4许先A 17:11查看AI文稿AI文稿
17:11查看AI文稿AI文稿各位刻画者大家好,然后前两天,也就是在那个二零二三年八月六号的时候,米四七二零零 发布了新的 rc 四这个发行版,然后由于这个发行版更新了 block 的原因,这就导致了对于现有的 rc 三之前的第三方库来说, 这个库导入到 r c 四版本以后,可能会有爆粗的产生,导致这一个库没法用。然后现在就专门录制了一个这样一个视频,来讲解一下对于 r c 三之前的这一个库来说,如何识别到 r c 四版本。 那首先以这个之前在群里发的这个,也就是已有第三方库适配到米四下定零 r c 四这一个 mac 档文件为基础, 然后一步一步讲解一下,他这儿总共提供了四个步骤。然后就从第一步开始,一步一步讲解一下如何调整现有的 t 三万库,然后来识别到 r c 四。首先 我们所使用的例子是之前在云端库里面所见到的这一个电子罗盘,这个库也就是 q m c 五八八三 l。 然后在这一个 markdown 文件里面,首先第一步是调整 x m l 文件, 然后这里说,嗯,先看代码吧。首先比如说 r c 四这一块为啥要 对于这一个 x m l 有调整的?因为比如说对于这一个现有的 x m l 文件里面它所书写的内容,第一部分其实就是关于文件的引入部分,第二部分就是关于快的这个目录的结构的一个定义部分, 那其实现 r c 四调整的重点就是关于文件的引入这个路径的部分,嗯,仔细观察这一个路径的引用,可以看到他的这个骑士目录是从 libraries 开始,然后一直到 c s s 文件或者是 g s 文件,那在这一个路径里面,它的中间是包括有第三方库目录的, 那可以想象出来一件事情,比如说如果我这个第三方库目录的目录名有调整的话,那么这个路径是没办法正确的引用到正确的 见的。比如说如果我这个第三方库的目录变成了像现在这个米四七刚 q m c 五八八三 l 的这个目录名,那么如果我还把这个路径写成 q m c 五八八三 l 的话,那再导入到 rc 三版本之前的米四七以后是会有爆粗产生的,那 rc 四这一块特地对这儿做了一定的规范。现在他的起始目录于 一律定成了从第三方库目录开始,也就是对于 q m c 五八八三 l 来说的话,就是从米斯奇杠 q m c 五八八三 l 开始,然后从它开始,然后来调用。可以引入其他的,比如说 该目录下面的 c s s 和 g s s g s 那修改方法也特别的简单,也就是删除之前的 library, 然后 set party q m c 五八八三二的这一个就可以了, 那 s m l 文件这儿就修改完了。接下来看一下那个关于 generate 部分的修改,然后由于最新版本更新了 blockly, 然后 blockly 最新版本的 blockly 它对于图形快的 generator 的书写有一定的调整, 具体的调整就主要就是这个代码框里面所提到的,在 r c 三之前的版本当中, generator 的书写是 block 一点语言,也就是 这对于 idol 版本来说就是 blocklead 啊 idolino, 然后跟上一个快的名字,那么 rc 四开始呢,就变成了 blocklead idol, 点 for block, 也就是命名空间是有变化的,在已有的 blocklead idol 技术上加了一个 for block。 对于图形块比较多的时候,可以通过以下两个真的表达式来对我们现在的第三方库做调整,比如说上面这两种真的表达式,分别是对于以下两种情况的, 然后首先是以第一种情况为,首先以第一种情况来说,我们先复制这一个插兆的这一个针的表达式,然后打开便利器, 然后在 find 的这个类别下面找到 finding infume, 这个时候一定要打开匹配中的表达式这一个项,然后呢 也把这一个大小写敏感打开,然后把刚刚的阵子表达式复制进去, 然后把要替换的这一个结果也复制进去, 这个时候查找的目录选择成现在的所要调整的第三方库,我这里就是米四七杠 q m c 五八八三 l, 然后我这里面已经选择了这个目录,所以说就不再选择了。那这个时候点击 replace 的话,可以看到它 显示有四个地代码片段将会被调整,然后直接 replace 即可。这个时候就可以看到对于原有的 blocklead 爱读运动点什么什么什么,现在一律变成了 blocklead 爱读运动点 for block 什么什么,然后先保存一下, 然后简单 red 部分这一块也就调整完了,然后下面再看一下对于 block 的调整。 block 调整先炸分两块,一块是对于多元支持不支分的调整, 嗯?为啥要调整这一款呢?因为对于新版本的 block 里来说, block 里官方是建议 对于语言文件一律是放在 blocklead msg 这一个秘密空间下面。那米思琪之前对于多语言支持这一块的书写是不太规范 看的,比如说对于它是有 blockley 店 blockly block p y, 然后 blockly 店米斯企业什么什么什么,然后现在 对于 r c 四版本以后来说的话,就一律变成了 block 类点 m s g 点这一些,也就是和其实和 generate 部分是一样的,也就是在已有的秘密空间的基础上又加了一个 m s g, 那首先还是以 q m c 五八八三这一个库为例,然后来看一下如何来改这一款, 嗯,可以看到这一个库里面,因为它本身就已经书写成了符合最新版本 block 里的要求,也就是说都是用 block 里点 m s g 作为起开头,所以说对于这一块,嗯,多语言这一块不需要调整。那再看一下对于另一种,也就是 对于这一个路径的书写这一块图片图片的这一个引入的路径的书写, 那还是和 x m l 文件里面,对于 g s 文件和 c s 文件引用的这个路径这一块一样的一个诟病。也就是对于 r c 三之前的版本来说,由于 他的这个引用路径里面包含有第三方库的库名,这就导 这个,其实如果说第三方库他的目录密有调整的话,那这一段代码也是需要随机修改的,这就特别不人性化。所以说 rc 四以后在 gs 文件里面,官方推荐是这种书写格式,首先复制这段代码, 然后粘到 vlog 文件这一部分,然后这段代码的用处就是来获取 media 这一个目录它的这个绝对路径,然后首先看一下为啥这么写,然后首先在第七行代码这里,首先是加载出来这一个配色模块,然后呢 document 点 current script 点 s r c, 它获取的是 q m c 五八八三 l 这一个 blog 文件它的这一个绝对路径,然后以它作为基础去找 media 这一个目录的路径,最后就会得到 media 这一个目录的绝对路径。 那么这个时候我们就可以修改这个现有的图片文件它的这个路径, 也就是把 media 这个之前的这个路径换成 我们所获取到的这个 mitim 目录的绝对路径。 那现在的话就是 调整完了,也就是把之前所写死的这一个路径换成一个动态的,根据现有的这一个 blog 文件,然后来查找到的这一个路径,以它作为基础,然后去找里面的这个图片文件, 那关于 blog 这一块也就调整完了。最后就是关于多元支持这一块,也就是 language 兰桂琴里面又有三个小部分,一个是关于中文,另一个是关于,呃,一个是关于简体中文,另一个是关于繁体中文,还有最后一个是关于英文的, 然后咱一步一步来调整,首先是宽裕,首先是看这一个简体部,简体中文这一部, 那看一下,先复制一下他所给的视力,然后把它粘进去, 然后呢找到之前我们所复制的这一个, 然后可以看到现在它所它的密密空间是在 block 里点 m s g 这个里面,然后在里面添加 key 和 value。 那 对于 r c s 版本来说,官方是提供了一个新的秘密空间来供开发者来增加自己的语言数据,比如说对于中文来说,它的秘密空间就变成了 block 里点烂点这个鉴定中文,然后呢对于繁体中文, 也就是都在这个 block 里点烂这个秘密空间,下面然后添加对于中文、简体中文、繁体中文和英文的支持。 所以说对于 blocklead m s g 这个命运空间,我们就要变成简体中文的这个命运空间,那这个时候对于这个简体中文这一块也就调整完了, 然后再保存一下,下面再看翻译中文这一块,还是先把这些代码全部移除掉,然后复制已有的这个视力,把它 放进去。 然后呢再修改前面的这一部分的秘密空间,也就是把 block 类点 m s g 这个秘密空间换成 z h 杠 h a n t 这个繁体中文的秘密空间。 那关于繁体中文这一块,咱们也就调整完了,再看英文这一块,还是同样的把这个现有的代码给删除掉, 然后复制官方所给的这个视频, 然后把 block 类点 m s g 换成英英文的这个密密空间,然后再替换一下就可以了。 最后再全部保存一下,那关于 xml 的调整, generator book 粉的调整、 blog 的部分的调整, language 部分的调整全都进行完了,那这个时候还要做最后一步,也就是,嗯,因为在 r c 三之前的版本当中,软件是会自动识别这一个 language 目录,然后动态,然后 动态搜索这个里面的所有的语言文件,然后来加载进去,然后在 r c 三、 r c 四以后,软件是不再自动扫描这个开发者所添加的这个语言目录了,也就是 开发者需要自己把这些语言文件引入到这个自己的这个第三方库里面去,也就是还是其实和咱们引入原有的 c s s 文件和 g s 文件是一样的写法, 或者直接复制官方所给的视力。 那么对于这一块就是以 m 米斯奇 q m c 五八八三 l 这个目录为基础,夹在这个语言文件里面的简体中文、繁体中文和英文。 然后呢随即就是关于外观的定义文件, 其次是关于图形快代码的生成文件, 然后上面这 一个就是 c s s 样式文件, 那么最后那个这些全部都修改完了,整个保存一下,然后现在咱们到米四七 r c 四里面重新导入, 那这个时候可以看到这个电子罗盘库就已经可以正常的显示了, 那我们随便打开一个视频, 然后看一下它的 代码也是可以正常生成的,然后再编译一下,看一下, 可以看到是可以正常变异的,所以说关于这一个 q m c 五八八三 r 的这个库已经适配到了米斯七二零零幺 c 四这个版本上面去了。 好了,今天的讲解就是这么多,有问题的话欢迎在评论区讨论。
4齐护 01:16查看AI文稿AI文稿
01:16查看AI文稿AI文稿一分钟搭建物联网平台,硬件准备一块八六六,软件准备这个米四七工具,在这里面找到网络,找到 biynk。 我说整套物联网方案只需要调用这一个命令,你信不信?不信那就接着往下看,这里填入夫妻地址, 再填入你家里的 wifi 和密码,最后这个参数填入一个 b i y n k 授权码。授权码怎么获得呢?在手机端安装 b i y n k 这个软件首次使用,先要进行注册,配置这个域名和端口号, 再填入一个符合格式的邮箱和密码,就能完成注册了。注册成功后,点击这里的加号,创建一个工程,然后点击设置,进入这里面就可以找到授权码了。点击 copy 复制下来,将它填入到这里面,程序也就完成了。 上传程序上传成功,互联网平台也就搭建好了。我们在手机 app 里面配置一个按钮,测试下效果,用这个按钮控制 下板仔上的 led 灯,板仔上的灯接的是二号端口,所以这里写拼二,这个要选上。 ok 了,点击这里进行连接,点击按钮,开灯关灯,是不是很简单? 你注意啊,不要觉得他只是个开关,这种控制是没有距离限制的哦,如果你想控制别的什么家电设备,再配个继电器就可以了。有需要这些软件和 app 的朋友可以到我们群里下载。学物联网不难,会用电脑就能玩。
1809轻玩科技·老肖 04:03查看AI文稿AI文稿
04:03查看AI文稿AI文稿制作这样一个超声波距离检测模块,我们只需要干对三件事情就可以,第一选对硬件,第二会接线,第三就是会编程,很简单很简单,我们现在就开始。首先第一步硬件的选择,十几块钱的八二六六开发版套装,一套 两块钱的超声波模块,一个他有四个引角,一个正极,一个负极和两个信号引角。第三 一个零点九六寸的 oled 显示屏,一个线来接一下,我们看着电路板的这个丝印来接就行了。首先是这个超声波模块,找见他的正极 vcc, 我们接在这个八二六六的正极上边,然后是他的负极,然后是 jnd, 同样接八二六六的 g a d, 看着私印很好接的,然后是它的信号线,第一个是 t r i g, 接在这个十二引角吧,然后还有一根信号线 e c h o, 接在这个十三引角吧,他们两个是挨的。 然后是这个 oled 来接线,也是看着私印来接就行了。首先是 vcc, 他的正极接八二六六的正极三点三伏,然后是负极 gnd, 接八二六六的负极针地,然后是两根信号线 scl, 同样接在八二六六的,我们看着 c scl 五号引角,然后是 sda 四号引脚,好了,线接完了,打开米斯奇的编程软件,在传感器里边,我们先把超声波这个语句拖出来,然后刚才用到的引脚是十二引脚和十三引脚, 因为我们测的距离是可以变动的,所以我们要拉一个变量出来,声明一个全局变量,把这个变量复制给这个超声波,然后是这个变量 就是我们测出来的这个值,我们现在就是把这个数值测试出来了,还要让他在这个显示器里边显示出来,然后在这个 oled 里边 先把这个屏幕初始化一下,初始化以后我们把这个需要显示的内容是一个子函数,我们把这个子函数也拉出来, 这个是它可以显示的子函数, 然后把这个函数的名称给变一下, 这个就是在这个里边,内容里边就是我们要显示的内容,刚才我们这个内容是这个用这个变量来显示的,我们所以要在这个变量里边把这个内容 itm 把它给放在这块,放到这块以后,我们还想还想让它显示成文本的,所以我们在文本里边找见一个这样的语句, 然后把它给放到这个文本语句里边,后边再改一下,改成 cm, 改完之后把它给拖进来,这样我们 程序已经编好了,整理一下,然后插上数据线,打开窗口看一下,窗口已经打开好,我们开始上传程序 好了,程序上传好了,我们来看一下, 好,看这里啊, 他会随着我们这个物体的远近距离会有所变化,这样的看清楚一点。 好,我们今天的视频就到这里,谢谢大家。
204鱼缸学电路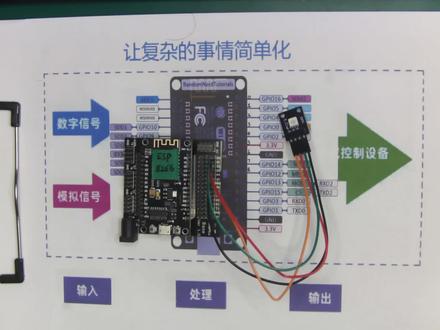 06:06查看AI文稿AI文稿
06:06查看AI文稿AI文稿让复杂的事情简单化,一天一个知识点,每天进步一点点。我们今天要探讨的话题是 rgb 灯的使用,那我们要用到的硬件还是这个十八块钱的八二六六开发版一个,还有这个两块钱的 rgb 小灯一个。 我们先看一下线怎么接,这边是八二六六的单片机,这边是 r、 g、 b 的小灯,这是它的正面,我们来看一下它背面 这种 r、 d、 b 的三色小灯有四个银角,其中一个银角是固音级的,接八二六六的 d、 g、 n、 d, 另外三个银角,当 r 是高电瓶的时候,这个小灯会发出红光,当 g 银角是高电瓶的时候,他会发绿光。 b, 银角是 高电瓶的时候,它就会成蓝光。我们先把线来接一下,先是它的负极是供音级的,接在八二六六的 jnd 上边,然后是 r、 r, 我们接在五号引脚吧,第一 g、 j, 我们接在四号引角吧。第二 b、 b, 我们就接在零号引角,第三好线就接完了,线接好了,我们来看一下程序,打开米四七软件,先把我们刚才的三个引角给找见,输出引角。五号引角是高电瓶的时候,红色灯会点亮, 然后是四号引脚,四号引脚是高电瓶的时候,绿色的灯会点亮,然后是零号引脚。零号引脚是高电瓶的时候,蓝色的灯会点亮,但是我们不能让他们同时点亮,这个时候我们就要分别给他们重新设置一下。 当五号引脚高电瓶的时候,红色灯亮,让其他两个灯要熄灭,这个时候我们就要给他们再设置一下,四号引脚是低电瓶, 零号引脚也是低电瓶,这个时候就只有红灯亮,另外两个灯是灭的,然后在这个绿灯亮的时候,就是四号高电瓶的时候,我们要让这个五号引脚和这个 零号引角都是低电品, 那在这边蓝色小灯零电,蓝色的这个小灯零高电瓶的时候,那这个五号引脚 和四号引脚都要是低电瓶,这样才能保证蓝色的灯会亮。我们设置好他们分别亮之后,还要给他们一个时间的控制,我们在这个控制里边找见这个延时, 延时一千毫秒,也就是一秒钟。 好的,那我们来再看一下程序,前三句就是让这个红色的灯亮,然后 蓝色和绿色的灯都是灭的,下边是这个绿灯亮跟蓝灯亮,他们分别要亮这个一秒钟,都给一个一秒钟的延时好了。程序编好了,我们插上数据线给他注入灵魂, 打开六号端口看一下,串口已经打开,我们点上传 程序上传好了,我们看一下这个小灯开始闪烁, 小灯已经点亮了,我们回到程序,我们可以让这个程序更简单一点,我们加入这个函数的概念,前三句主要就是为了让这个 红灯亮,我们用我们命名一个函数叫做红灯亮,然后 把这前三句给拖进去,他就成为一个,他就成为了一个函数了,在这个函数里边就会出现一个新的函数调用,叫做红灯亮,就是我们刚才才建立了这个函数,同时我们可以把这个 再建立一个绿灯亮的函数, 然后再建立一个蓝灯亮的函数, 这个时候我们继续打开函数这个窗口,就可以看到我们刚才建立的三个函数,接下来我们使用这个函数来进行编程, 我们让这个红灯亮在这里直行一秒钟,接着让这个蓝灯亮在这里直行一秒钟, 然后让这个绿灯亮再接着执行一秒钟。看这样一来我们的程序就简单了好多, 我们再把这个数据上传一下,看是不是和我们刚才会有一样的结果。打开窗口 上传程序。好,程序上传好了,我们来看一下这个新程序和刚才我们这一个程序是完全一样的,都实现了小灯的闪烁。好,我们今天的视频就到这里,谢谢大家。
54鱼缸学电路 02:17查看AI文稿AI文稿
02:17查看AI文稿AI文稿各位同学大家好,今天呢我们来讲解一下 j h 零三 b 这款粉尘传感器的使用,在这里呢我已经做好了库了,我们直接找历程,然后找 zh 零三 b, 然后找到获取 ph 值,这个快点一下,双击一下就可以了。 接下来呢我们再来上传一下,看看效果,这里开发版呢要选择正确的更好。然后我们再来讲一下它的音 角,这个银角呢是比较多的银角呢,我们来看一下啊。这里通过了一个转接版之后,将它的所有银角呢都是转接出来的,我们只需要接 v, c, c, v, c, c, c, n, d, 还有 r, x d 和 t x d 这四个音角就可以了。这边的 t x d 呢接的是十一, r x d 呢接的是十, 其他的菱角呢就不需要接了。 b, c, c 呢接的五伏,兼地呢接的是兼地,这个呢就是它的一个接线,我们现在来看看效果, 效果呢现在就是每隔一秒打印出来当前的 pm 一点零 pm 二点五 pm 十,它的这个值单位呢是每立方米,这个就是它的一个效果,可以用来测一些粉尘呢还是可以的。 好的,本节课的讲解就到此结束,感谢大家聆听,我们下节课再见。
1达者为师 01:58查看AI文稿AI文稿
01:58查看AI文稿AI文稿用按钮控制 led 灯之前是直接把按钮的纸复制给十三号角,但是为了制作验 是 led 灯必须用到变亮,所以这一个实力就说一下。变亮。控制 led 灯。先准备一个全局变亮,名字为做 it em 就是他的名字,并复制为 低程序开始读取二号音乐的纸,把它复制为 把它保存到 it 爷爷墓里面。保存好之后,程序向下直行到这一步,数字管角十三号角设为 it 爷爷拇指。因为刚才 他读到二号的纸。保存进去以后之后,如果当时是低电瓶,他这里也是低电瓶。如果你按下按钮之后,程序进到这一步的话,他就会 把高电瓶保存到这里。然后程序整到这一步的时候,他就会把这爱体验木里边的值拿到这里,所以还有一等就会高了。程序上传之后, 效果跟之前没有变亮是一模一样的,你按下他,灯亮 松开,他就灭了。按一下,灯亮松开就灭了。同样的是,同样是按钮控制,但是多了一个变量,多了一个中间人,效果是一样的。了解变量。
 01:46查看AI文稿AI文稿
01:46查看AI文稿AI文稿哈喽,大家好,我是来自广东省珠海市香洲区第三小学五年级三班的郑静达同学。 今天我给大家看一个我做的智能家居设备,用的软件有米斯基二点零、米加小爱同学和点灯不定,用到的设备有 esp 三二版 这个灯泡和座机,还有我做的这个房子,虽然不是很好看,但是效果还是很好的。 还有这个用到写程序的是李思琪二点零网店,这是他我写的程序, 然后在这里英文宾区这里一共用到了四十八行,也算是少量的程序吧。现在我们让我们看看效果。 小爱同学, 哎,关灯,这就是我的作品,谢谢大家。
44宣坝 01:38查看AI文稿AI文稿
01:38查看AI文稿AI文稿现在看一下这个电源,用这个电源接口供电效果。现在电压是十一点七伏,十一点七 起伏,看不清楚。现在的降低十伏,六伏,六伏的时候还可以正常工作,五伏 五伏也可以六伏,现在还是六伏,四伏到三伏的时候,这指示灯都已经不再亮,说明主板已经不再工作了。这边这个这边这个电源指示灯 看待指示,现在他已经彻底关闭 电压冲刀。三负四负,五负,六负,七负,八负,九负,十负,十三负,十四负,十四负也不会烧坏。这就是 这一个供电端口。那这样好, 这样好了,看完了。
 06:28查看AI文稿AI文稿
06:28查看AI文稿AI文稿实验八,震动传感器零一工坊文老师主讲 本实验主要设备是 led 和 sw, 两百 d 震动传感器两个设备都要连接两百二十欧姆电阻, led 正极连接电阻,然后用跳线连接到主板数字接口十三 负极用跳线连接到主板 gmd 接口。震动传感器一个接口连接主板五福接口,另一个接口用绿色跳线连接主板数字接口三,该接口同时连接电阻,用黑色跳线连接主板 gmd 接口。主板数字接口二、三有硬件中断功能, 当发现接口的电瓶数值变化后,可以中断整个程序,执行其指定的逻辑,这些逻辑执行完成后才继续执行主程序。在程序初始化 时,设置一个硬件中断程序,如果主板接口三的电瓶上升,就改变 stay 的数值。硬件中断控制支持的模式有上升下降变化,发生特定的变化后执行 blink 方法, 而该方法的逻辑是改变 state 数值,主程序中判断 state 的数值,让 led 灯变亮或熄灭。我们复习一下耳朵 inno 的代码结构包含初始化和循环执行两部分, 我们主要是配置循环执行区的代码,米斯奇工具会自动帮我们生成初始化代码,但中断逻辑就要配置初始化的代码,拖入初始化控件,以便配置中断逻辑。硬件中断模式为上升, 即数字接口三的数值由低电瓶变成高电瓶,即震动传感器发生震动时,执行特定 方法。默认情况下,震动传感器内部没有连通,数字接口三为低电瓶,当发生震动后,设备内部连通数字接口三为高电瓶,这样就触发了中断逻辑, 执行 blink 方法,而该函数中设置 state 状态数值加一中断逻辑,如果发生了,就马上执行中断函数,该函数执行完毕后, 继续执行主程序代码。在主程序中判断 state 的数值,如果不等于零,就让 state 的数值为零。 led 变量,并持续零点五秒,否则让 led 变暗。 主要设备是 led。 一个震动传感器,一个电阻,两个跳线五条。将 led 灯插入面包板,这 正极连接电阻,再连接到主板数字接口。十三、 l, e, d。 负极连接主板 g, n, d 接口, 将震动传感器接入面包板,左边接口用红色跳线连接到主板五伏接口,震动传感器另一个接口接入电阻, 用绿色跳线直接连接该接口和主板数字接口。三、不经过电阻,用灰色跳线连接电阻和主板支援 d 管角。 硬件连接完毕, 下面开始电脑端编程。首先定义变亮,用于设置 led 灯和主板中断接口的数值, 操作时可以通过复制加快配置的速度。复制后修改变量名称、初始复值和变量类型。 定义 state, 全局变量贯穿整个程序。在中断逻辑中修改数值,在主程序中还原数值为零, 拖入初始化控件,其配置的代码将生成在 arduino 初始化逻辑中 拖入硬件中断空间。配置好接口,为之前定义的变量。 新定义函数 blink, 在方法区中配置 state 的数值不断增加。一、 在硬件中断空间的代码区配置,调用 blink 方法 编写主程序区代码,拖入判断空间,如果 state 的数值不为零,就执行下面的代码, 在如果的代码区设置 state 的值为零,设置数字接口十三为高电频延时五百毫秒 设置,否则区域并在其中配置数字接口十三为低电频。 执行代码编译,如果编译正确,则连接主板的 usb 线上传代码到主板中。 所有配置完成。我们查看执行的效果,轻轻敲击桌面或面包板,产生震动, led 自动点亮。 实验总结本结结合课程内容,陪伴着朋友们一起学习震动传感器实验,学习硬件接线,米思琪编程代码上传执行,让大家可以更加了解 verduino 电子原型的相关操作,提升了动手能力。
30零一工坊




猜你喜欢
- 7592懂AI的阿胜