安川机器人圆角方框怎么编程
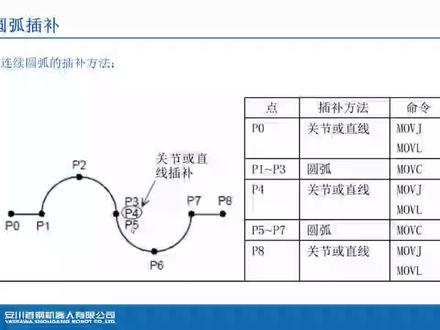
继续向下圆弧插补,关于圆弧插补呢,这里会讲到单一圆弧和连续圆弧,以及圆我也会稍微提到一下。 首先看下概念,机器人通过以圆弧插补的视角方式,三个点能够画出一个圆弧,大家注意啊,一定要是三个点能画出圆弧,指的是这一点,这一点和这一点, 然后实现激情在圆弧上进行动作,他的命令是木 c, 他的速度单位呢是 v, 速度标记是 v。 然后后面同样跟刚刚讲到了直线差谱类似的,首先看一个单一圆弧差谱,单一圆弧差谱呢?如果说我想画出像 ppt 中的这 一个连选壶,在这里这里,这里,也就是 p 一, pip 三我都要用 mc, 你看大家,大家看一下,右侧有说明,而 p 零到 p 一, 他可以用木剑,也可以用木乃,奥, p 零到 p 这一段是自动生命的直线,大家注意啊,这一块是自动生命的直线的, 然后 p 四,你可以用木剑,也可以用木啊,你用木木 l 的话,那 p 三到 p 四就是一个直线。而关于两点之间从哪个点开始形成直线,或者说走自由曲线,说明书中呢,有详细说明,希望大家注意啊,这个地方是以存在 一定的某品,或者说容易粉淆的,你呢,要看多看书,在这里呢,由于时间关系,我们就去过多的去展开。

粉丝7437获赞1.5万
相关视频
 01:40查看AI文稿AI文稿
01:40查看AI文稿AI文稿而在这个位置只有一个点,看他整个的点 只有一二三四五个点,而上一个图片是一二三四五六七有七个点,这是他的一个不同,不同我们用到了哪个指令呢?用到了一个 ftt 指令 app 呢,叫做圆弧中指,指定在这个地方呢,我是告诉他用来 p 三,这点是告诉他上一顿圆弧到此终止,同时预示着下一顿圆弧从此开始,然后形成一个连续圆弧。差不同时 想拿主页啊,也就是说连续用差谱两种方式,一个是上页那种方法,用两个单元壶来进行拼凑,一个是这种方法,我们用 fp 圆弧中指定 来进行一个操作。好的,我们继续向下。关于自由曲线差不多 再进行焊接,切割,上底漆,也就喷涂时,越是使用自由曲线差,不更易于对具有不规则曲线的工业进行视角。大家也发现了,我木 l 和木 c 都是针对比较规律的或者是有规则的曲线来进行视角。 哎,木 s 呢,有他的一个特殊性,用自由曲线插部对机型进行施要的时候呢?我的命令是木 s, 大家注意是木 s, 然后单条自由曲线插部。我们来看一下,比较简单, p 一点, p 二点, p 三点。要如此说明啊,我用木马 s 第一个点和开结束点可以用。
 07:25查看AI文稿AI文稿
07:25查看AI文稿AI文稿大家好,本节课我们学习一下安装机器人视角器常用按键的认知。呃,关于这些常用按键呢,我们了解一下他的一个啊具体功能啊,具体有哪些? 我们现在看到这一个呢,是一个实际视觉器的一个拍摄照片啊,那关于这些按键的一些说明呢?我们可以呢在我们安窗的相关手册上可以查到, 我们打开一个手册,这个呢是 ex 两百的操作要领书中的关于视角编程器啊,就是我们视角器的一些一些按键的一个说明啊,在这个上面的这一个图标呢,它是一个模式键,这里呢有三种模式啊, 一个呢是远程模式,一个是在线模式啊,中间这个是 play, 是在线模式,还这个有小数图标的啊,我们叫做试教模式。那这三个模式呢 啊,他中间呢会通过一个钥匙开光啊,进行一个啊切换。那么远程模式呢,就是说我们是通过啊外 不得输入信号来控制机器人相关的动作啊,那么这个在线模式呢,我们是可以通过啊,这旁边有一个按钮开关啊,有个开始按钮绿色的,我们可以通过他来控制我们在线模式的一个启动。 那么这个试教啊,就是说我们在手动编程的时候的一个模式啊,因为很多时候呢,我们都是如果说在现场通过试教器进行现场试教的时候,我们往往 是需要切换到这个试驾模式啊,那么再看这一个开始按钮啊,这个按钮它是一个绿色的啊,可以按下去,当然了它也是一个带有,嗯 也是一个灯啊,就是说他在运行的时候呢,这个灯呢,会这个绿灯啊,会进行一个啊亮起来,然后这个是一个白色的暂停按钮啊,那么你按下去,那么机器呢就会进行一个停止运动啊, 然后这个红色的我们急停我们的急停按钮啊,呃,如果说你按下去之后啊, 那你需要按照这个箭头所标的一个旋转方向啊,去把它复复位掉,这样才可以复位掉啊。然后这里有两个红色的框呢,分别是我们的 usb 接口跟 sa 副卡的插槽,那这一个呢是在我们程正常一些呃程序的备份还原呢啊上进行相关的使用啊,那么这一个是在背面啊,是在这个视角器的背面哎,这个 cf 卡呢是在插口,是在侧面啊,是在侧面 啊,再往下翻呢,这里呢是一个啊,一个上下左右的一个光标键,那么他呢是控制我们呃视角屏上相关的一些啊操作啊,可以切换移动我们的光标, 那么这里呢有我们的翻页键啊,当然还有我们的一个呃选择窗口主菜单啊,坐标切换按钮,然后呢我们的一些登录啊,直接打开,是否准备我们的语言切换我们的一个 关注还有我们的清除啊,这个清除了,就在我们发生一些报错的时候,我们可以通过这个清除键呢把我们报错信息啊,在屏幕上方进行清除掉,因为有的时候呢如果说你不清除报警的话,你的一些按键呢是没法啊,正常使用的 啊。然后呢这一个坐标键呢是可以进行相关的坐标切换呃,着重说一下这一个是否准备啊,这是是否准备的按键,当我们开机的时候呢,我们的啊,需要通过我们的, 那是要气人来控制机器人,我们首先呢是需要按一下这个四伏准备啊,这个时候你在控制我们机器人的使能线上电啊,这个才能把这个这一个四伏接通,这么一个灯啊,才会亮 起来,你才能呢操控我们的机器人,所以这一步呢,在师傅准备啊,是在你操控机器人之前一定要提前做的啊 啊,这个选择键,这在我们这个屏幕当中的一些选择啊,是需要通过这个按键来来进行相关的,呃,确定的我们选择键 啊,这里呢有个速度高低,对吧?那这是我们通过手动啊进行运机型速度的一个调节 啊,在这里啊,然后呢我们可以看到这两边啊有几个按键啊,那么他是轴操作键啊,如果说机器人是在轴运动的时候呢啊,他身上对应的是我们呃机器人每一个轴,比如说我们安装机器人呢啊,六轴机器人啊,他是用 l、 s、 l、 u、 r、 b、 t 啊,这个是六个字母表示六个轴的一个称呼,那么当呃 这个 x 减 x 加啊,其实我们看下面有个 s 减 s 加,就是操控我们一轴 s 轴的他的一个正反方向的一个动作,那么这一个就是呃 l 轴,那这个是优轴的正反方向啊,当然我们如果说把我们的坐标线呢,通过这个按键 啊,把我们坐标系呢切换到我们的呃直角坐标系,那么它对应的将会是我们 的沿着我们坐标器的 x 轴的正反方向啊, y 轴的正反方向以及 z 轴的正反方向的一个运动,那么右边呢,那就是在对应的轴的一个旋转动, 这是这六个按键的一个使用啊,那这里呢有一些数字按键啊,有的时候我们是需要相关的一个呃,数字输入,那么可以通过这些上面的按键来进行操控。 然后呢这里一个回车键啊,回车键很多时候呢,他也是也是一个搭配使用啊,就是比如说你要修改一些东西啊,或者删除插入啊,那你都要 配合这个回回车键来使用啊,如果说你的要修改,比如说我们要修改某一个程序点,对吧?我们单击修改,你不按回车啊,他是无法生效的。这个回车键 啊,这个插补方式呢,是我们对相关运动指令啊,它的一个,嗯,插补方式的一个, 嗯,切换,好吧,还有我们的啊,这个连锁键啊,也是搭配我们的一些呃,按键使用,比如说你连锁加幸运型,连锁加后退,连锁加前进啊,这些按键他可以搭配使用啊,这个转换啊,同样啊,他也是一个搭配使用键 啊,也是 w 水邮件,有的时候呢,转换加我们的上下光标,对吧?可以切换我们的一些速度啊。关于这些详细的呢,嗯,我们可以呢,在以后续的一些实际案例中啊,进行一个嗯,讲解 啊,那么这一个呢,就是我们饲料器的一些按常用按键的一些说明,但。
105工业机器人教学 00:53
00:53 02:53查看AI文稿AI文稿
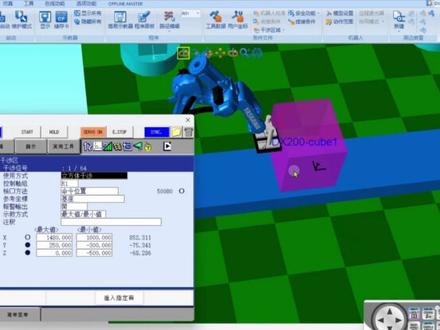
02:53查看AI文稿AI文稿度,手动输入于我们的速度,一个我们的线性等级等等之类的东西。然后下一个我要说的就是我们的一个对于程序的一个插入和删除以及修改的一个啊功能按键。 我们可以看到程序的话,我们有时候会需要删除插入或修改一些坐标点,那么我们删除修改会啊插入的时候我们就需要用到这个按钮,例如我想在这个程序,我想在这个第一行的程序 要的下方再插入一个木料,这个指令怎么做呢?那我们只需要我们首先第一步是要回到我们的这一个,是要运行我们这个地方的程序,让机器人去到他的这样的一个位置,然后 我们可以看我们的右上角这里,这个地方这一个状态栏这里的一个,然后我们看我们在运行的时候,他会改变他的一个形状,这是一个播放按钮,这是证明我们的机器其实是在运作的,那么 他现在就是说他还没有达到我们想要的点,当他达到的时候他会变成一个正方形,一个黑色的背景的图案,哎,就是这个。然后我们需要插入的时候,我们只是需要 调出我们的一个,调出我们想要的命令,让我们摁插入,摁回车啊,这个时候我们是需要手动回车,我们可以看得到我们这有两行程序变成了三行,这时候就证明我们已经插入成功了。 好,大家接下来看一下,我现在要讲的是一个我们的一个试教器的一个显示区。试教器的显示区呢,它主要分为一个部分,首先看我们这边的上面的一个部分, 也就是我们的一个程序编辑显示使用工具,这是我们的一个菜单显示区,然后在他隔壁, 隔壁他的隔壁呢就是一个状态显示区,然后中间,中间这里用来程序编辑的地方主要是叫做一个通用显示区,然后看我们的下面,下面这边有一个 这个叫做人机接口显示区,他主要是来看一下看我们的一个报警信息。然后最后是我们的一个菜单显示区,也分为我们的菜单显示区,分 一个主菜单和一个简单菜单,然后这个就是我们的一个主菜单的一个啊选项。 然后我们先来看一下我们这个主菜单的显示区,主菜单的显示区主要分为两个,第一个是像我们可以看得到比较程序内容通用电量。
 01:36
01:36














