workvisual设置机器人ip

粉丝865获赞1677
相关视频
 05:05查看AI文稿AI文稿
05:05查看AI文稿AI文稿点击创建连接 好,现在。是啊,现在上传的这个项目就跟 我们当前社交局显示的这个程序是一致的。啊,刚才不一致,这个是因为他残留了之前的啊项目。那所以呢,我们只能把它断开重新再连接他再刷新一遍啊,否则的话可能刷新不过来。 如果说你现场碰到类似的问题,你就像我这样断开再连接一次。好,那现在我们可以看到打开这个 man 程序,看它有 什么内容,密密麻麻的,好像很多,其实不多的,我们把这些带有减号的通通给他啊,这个是给他展开一下啊,慢,我们展开,然后把下面慢的这些折叠给他关闭掉。啊, 看到没有?其实就这么多,我们的这边我们也打开慢看一下,两边的内容一不一致啊,一致的是不是一致啊?大家对比一下对吧?一致的啊, 好,那么他一致就好办了,一致。如果说我要修改 gcn 程序,比如说在这个地方我要加一 一个脉冲 purse, purse 是吧?挨个脉冲给谁? 给?这个通过,通过多少?通过输出口送是吧?哪个输出口?比如说十号口发送脉冲, 脉冲还是副脉冲?脉冲好去时间是多少?比如说三秒钟。好,我们发这么一个指令,没加之前这里是没有发脉冲指令,大家注意看啊,那等会我们同步一下。好,现在程序写好了,我们点击将更改, 将更改传输到控制系统。那么在点将更改传输至控制系统之前,视角器端一定要记住,登录 录专家及专家以上的权限都可以。好,此时看我们先退出,然后点击传输 将更改传输至控制器,好,点击确定。 他问,你要传输哪个内容呢?当前是不是我们只改慢程序里面,其他都没改?对啊,他帮我们检测到了,只有慢发生更改,那么他只传输慢。好,那我们确定无误之后,点击下方的确定按钮,等待访问权限。此时在视角器端,他会提示 是不是接收远程的,这个控制是一定要点是,好,那么就开始传输 啊,传输完毕,他这个框就消失掉了,对吧?消失掉,我们打开视角器啊,一打开,打开之前我们点击撤销,他就接受传输。我们看一下刚刚更改的 这个指令是不是新增加一个发脉冲的这个指令啊?已经传授过来了。 好,那我们再试一下,加其他的指令,比如说给他延时,延时五秒钟啊,这里呢呢?再打开一个端口, 比如说中文号考 and me too。 好,然, 然后呢,这个地方做个 if 判断, if if 什么来? if, 如果输入单口,比如说八号口,等于等于 two。 什么啊? 啊,那么时候零。好,嗯,然后呢? end the if, 把这个空行给它删除掉啊,好, 我们按了初步图的指令,然后我们把这个更改给他传输过去。这是我们编程在尚未捷软件编程编号之后点传输确定好,确定,此时在试教器上面点击同意。 好,传输完成,传输框自动消失,我们点撤销,打开慢程序看一下。
 00:47查看AI文稿AI文稿
00:47查看AI文稿AI文稿首先设置电脑 ip 与机器人 ip 同网段,机器人 ip 段可以在 plc 组态中查看,将网线连接机器人交换口或者其他设备网口,点击左下角编程和诊断, 在右上角单元视图中刷新后勾选所有机器人,在左边刷出机器人状态后选择全部存档,选择存档路径后点启动, 等待存档完成,启动由灰色变成蓝色, 存到完成后查看数量,不要有漏网之鱼。
97超神的火龙果 06:47查看AI文稿AI文稿
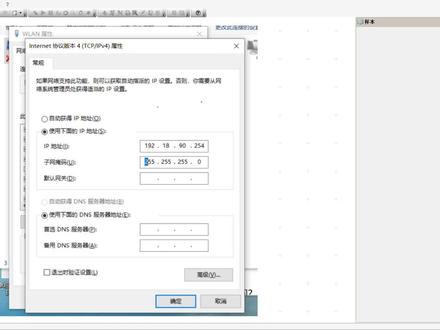
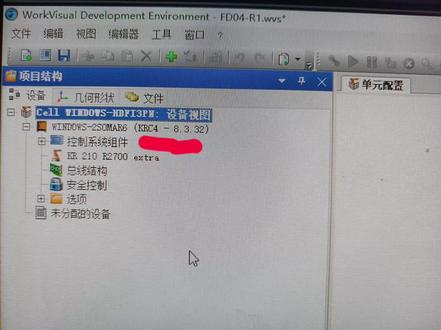
06:47查看AI文稿AI文稿本节学习使用 work vivo 软件配置机器人,学完本节内容,要求大家知道如何连接机器人与电脑, 会查找与打开项目,会在 work view 软件中安装软件包,并且能将软件包添加到项目中。 使用我和 vivo 软件配置机器人。首先要连接机器人与电脑,我们来看它的具体操作步骤。 首先将网线的一端接在机器人控制柜 k l e 端口,另一端接在电脑网络接口, 然后打开电脑控制面板,找到网络和共享中心。接着单机仪态网找到属性, 然后单击属性,选择 internet 协议版四,然后单击确定, 接着更改 internet 协议版本四则属性,将其 ip 地址设为幺七二点三幺点一点二零零,此网野马设为二五五点二五五点零点零。 然后单击确定,完成连接。此时在控制面粉中可能仍会出现黄色的感叹号,但是实际上已经连接。 我们来看如何在 work viral 软件中查找项目。 首先点击 work vivo 图标,打开软件, 接着单击菜单栏文件选项,选择下拉菜单查找项,在出现的 vlog viru 项目管理器中选择查找确定电脑与机器人连接好后,单击更新按钮。 接着在出现的 cell 目录下点击加号,可以出现此目录并且显示机器人的 work 零售项目。 然后选择华航为十零幺零七幺零的项目,点击打开显示机器人激活并正在使用的项目。这里 要注意在不确定的情况下,不能改变机器人激活项目的任意参数,否则可能造成机器损坏或人员伤亡。 我们再来看在 vlog visual 软件中打开项目具体操作步骤,首先点击菜单序列文件,选择打开项目, 然后在出现的 work visual 项目管理器中选择项目打开选项, 接着选中后置名为点 w v s 的文件,划航为十零七幺幺,单击打开按钮, 然后选中 story, 右键单击选择设为激活的控制器, 激活控制器之后出现 k r c 输入、输出和现场总线等选项的显示界面。 我们再来看在 work visual 软件中安装可选软件包。首先来看安装 architect 软件包的操作步骤,首先在安装软件包之前,我们需要确定所有项目已经关闭, 然后单击菜单序列的工具,在下在下拉菜单选项中选择备选软件包管理,然后再弹出的 备件软件包管理窗口选择安装。 接着在弹出的选择带安装的程序包窗口中选择后置名为点 k o p 的文件 architect basic, 点 k o p 并单击打开按钮,选择安装。 屏幕中的图片就是软件开始安装的界面, 安装完成之后系统会提示完成,这里需要单机重新启动,以示更改声效。 我们再来看安装 prefinite 的软件包的步骤,首先重复安装 architect 中的一到三步操作步骤, 然后选择名为点 k o p 的文件 prevent press safe device, 点 k o p, 单击打开按钮,选择安装, 安装完成之后系统提示我们完成,此时单机重新启动按钮,使更改生效。接着来看安装 remote service 软件包的操作步骤, 同样重复安装 architect 软件包一到三,一到三步的操作,选择后缀名为点 q o p 的文件 remote service 单击单机打开按钮,选择安装, 安装完成之后系统提示完成,单击重新启动按钮,使更使更改生效。 再来看如何将安装的可选软件包添加到项目中。 首先选择项目打开,然后将控制器 k r c 是 small side 的,设为激活状态,并且选中选项文件夹。 然后右键单击选项文件夹,选择添加, 会弹出添加到选项的元素对话框选择要添加的软件包,比如 architect basic。 然后单击添加按钮, 这是添加软件包完成之后的图。
224自动化人才圈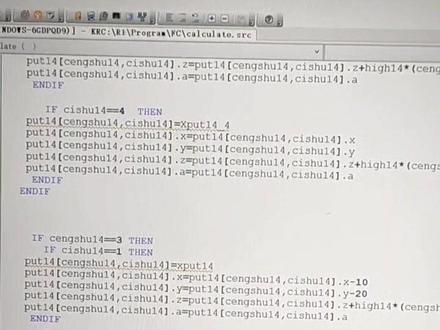 11:40查看AI文稿AI文稿
11:40查看AI文稿AI文稿我们来看一下第二种修改库卡机器人程序的办法,那就是用 voke vision 六点零软件。 welcome vision 六点零软件是库卡机器人的一个配置软件,同时呢又兼顾一定的编程功能。 如果用这个软件进行程序的修改,需要注意了,这个软件主要是进行配置机器人的一些参数用的,所以一般情况下很少用它中用来修改程序, 他只给调试工程师和对库卡机器人程序非常熟悉的情况下的操作人员进行修改,否则的话,普通用户我是不介意这么去修改的。如果 说实在要用这个软件去修改程序,那怎么办?那你首先要把原先的程序上传好,备份好,以防止万一你修改错了,还可以进行还原。 当你程序上传备份好之后呢?首先我们要把电脑的 ip 修改成和机器人 ip 同一个网段, 双击控制面板,之后点击网络和 internet, 点击网络和共享中心, 点击已泰网。这时候你的网线电脑要用网线连接到卡机器人,或者说通过内部局域网与库卡机器人连接在一起, 如果直连也可以直连的话,那你要连接到酷卡机器人主机上面的 kli 网络接口,双击 in tonight, 然后点击属性,双击 internet 协议版本四 tcpipv 四。 如果说打开这个页面之后他是自动获取 ip, 那么你要点使用下面的 ip 地址,把当前电脑的 ip 地址改成和机器人同一个网段 幺七二点三幺点幺点一百, 然后点击一下子网野马这一行,他就会自动生成子网野马,点击确定,点击确定关闭,这样的话电脑的 ip 就修改完毕。 当然了,在改电脑 ip 的时候,你需要注意机器人的 ip 地址是多少,在哪里查看呢?点击机器人主菜单,点击投入运行,点击网络配置, 可以看到机器人当前的 ip 地址是幺七二点三幺点幺点幺四七,此网野马是二五五点二五五点零点零。如果说机器人的地址已经被更改 过,那么你需要在试教器上面进行查看,并且记住好这个地址。之后呢,在电脑上面修改电脑的 ip 地址,使电脑 ip 地址与机器人处于同一网段。 当电脑的 ip 地址设置好之后,我们打开 walcobe 秀,六点零 启动 oppo v 九六点零软件, 启动完 完毕之后呢,会进入一个项目浏览器的界面,点击搜索,这样的话我们就可以把所有与电脑连接的机器人控制柜全部搜索出来。如果与机器人 与这个电脑连接的机器人有很多台,那你一定要注意啊, 这些搜索出来的项目分别对于哪一台怎么去看?展开搜索出来项目前面的加号,就可以看到他的 ip 地址,我们通过 ip 地址的 ip 地址的不同来 区别分开来到底是哪一个项目。 假设我们要修改的这个 项目就是这个 ip 地址,那么你就要选中它,展开之后,选中带有绿色符号的这个项目名称,选中之后点击打开, 就可以把当前的项目给他上载到 votep 手软件里面, 现在是已经上载完毕,我们双击控制柜图标名称, 把当前的项目设置为激活的项目, 然后点项目数最下方的编程和诊断,进入编程和诊断模式, 在编程和诊断模式下,它是空白的,我们要创建一个连接, 点击工具栏上方有一个创建连接的一个按钮,点击一下, 他就会在软件中央会弹出一个对话框,我们在这个对话框里面呢, 仔细查看控制会的信息和名称,确认无误之后呢,点击确定 的话,他就会把机器人的程序加载进来,那程序在哪里呢?我们来看前这个项目书里面已经出来了一个机器人的图标 koc, 并且上一把锁,继续展开他的箭头,展开阿姨文件夹, 展开 program 就可以看到他的一些文件, 这是 fc 下面的一个文件,如果说没有展开 fc, 那他可以看到的是外面的文件,如果说展开 fc 是可以看到 fc 里面的文件,找到你想要修改的文件,然后点击文件叫名称, 就可以把你要修改的程序显示到编辑区里,在编辑区里面找到你要修改的地方, 比如说这里是第一次,第一层的第一个,第一层的第二个,第一层的第三个,第四个。假设你要修改的是第三层的第二个他的歪方向,你觉得加二十有点少,那么你可以 改成加三十啊。假设后面的位置还要修改,那么继续找到对应的地方, 假设你要修改第十层,第十层的位置,第十层哪个位置呢?第十层第三个位置,假设减十五有点少,那么就改成减二十。 当所有的微调调好之后呢, 我们要点击将更改传输的控制器按钮,点击一下这个按钮会有一个弹窗,必须保存以下的编辑器,我们点击确定, 然后他会给你进行一个检查,哪一些是无动作的,哪一些需要覆盖,会有个列表列给你看,然后我们要点击确定即可, 这样的话他就开始进行传输,等待防蚊权限,假设说, 假设说你的权限不够是用户权限,他是无法传输的,因此你要需要在试教期上面登录专家权限,点击配置用户组 输入,选中专家,输入密码 koka 点回车。当我们登录专家之后呢,他 自动就弹出来了,是否允许远程反位控制我们点击式,这时候呢,机器人的程序就开始进行传输, 传输完毕之后,这个编辑区里面呢就恢复正常状态。 如果说你不需要再修改了,不需要修改,也就是我们的程序都修改完毕之后呢,在社交期上面点击撤销, 这样的话,我们就可以通过 vivo 一些软件进行在线修改程序,它有一个好处,就是说 可以不用优盘,我们直接联网在线修改即可。但是也有一个不好的地方,假设你修改无可维修里面的程序,你的电脑与试教器相隔很远的情况下,假设你是在办公室进行修改,试教器是放在 工作现场,那么你需要修改好之后点传输,之后,你需要跑到现场,在试教期上面点击同意,他才可以进行写入,这是他的一个不方便的地方, 具体怎么选择?是离线修改还是在线修改,根据自己的实际需求做出选择,那这节课就讲到这里。
 02:14
02:14 00:30
00:30 11:05查看AI文稿AI文稿
11:05查看AI文稿AI文稿好,今天给大家讲一下这个呃机器人替换,那么首先呢我们先从这个收藏夹里面,我们找一下这个一个机器人的这个机座, 然后我们再拖入一个 vc 里面自带的一个呃机器人, 然后我们通过偏僻功能,然后给他捕捉上去, ok, 然后呢我们可以把这个机座的这个洁面可以修改一下,嗯,调成五百, 然后我们到类型里面找到一个 fader, 找到一个供料器,然后我们找一个这个 shift fader, 然后我们再找一个输送线, 我们找一个带传感器的输送线啊, ok, 我 们找到这个就是这个带传感器的这个输送线,我们把它拖出来, 然后一样的用偏偏给他连接上,然后呃这个输送线的话,这个我们做一个布局的,我们就调一下这个速度, 调稍微快一点,然后这个输送线的传感器的位置,他目前是,也就是说这个森森的位置,他在这个输送线的一半的长度,对吧?然后目前一米五,对吧?他也就七百五的位置, 但是双线我们可以把这里调到百分之九十啊,它这个就是基本上在这个末端,然后把这个阶梯的位置我们稍微拖一下,拖动一下, ok, 我 们大概拖动一下,然后呢再找一个,找一个桌子啊,我们找一个 table, ok, 我 们找一个小桌子, 然后我们再找一个末端工装啊,我们找一个 robert tour 啊,那么之前的末端工装都在这个位置,我们可以找一个小吸盘 吸盘, ok, 嗯,然后同样我们用偏僻给它给装上去,然后这个小吸盘的尺寸我们可以修改一下, 然后长度改一下,一个是他的一个界面, ok, 然后这样的话我们这一个简易的布局我们就搭建好了,然后我们就呃做一下把这里我们先啊运行一下仿真,你看他这里一个 呃出了一个方块,然后我们需要的这方块在这里停一下,然后把这个 on sensor on 的 时候,我们让他把这个零件给停止好,我们再运行一下模拟, ok, 零件停止好,然后我们给他抓取一下,我们点击程序界面,然后我们点击机器人,然后呃点击捕捉啊,我们先选一下工具,我们选一下工具, 我们可以选用这个 gripper, 这个 t c p, 它自带的 t c p, 然后我们点击捕捉,然后捕捉这里, ok, 然后把这个点记录下来,然后再把界面往上抬到一个过渡点,我们记录一下, 然后我们这里给一个延时,比如延时零点五秒有电磁阀有作用时间,然后我们再 给个 c 套的,然后比如我们用一这个信号让他进一个抓取,对,然后我们回到接币里面,点击接币,然后点击这组建属性,我们找到输出一, 然后把这个使用工具,我们选用这个 grape tcp, 对 吧?也就是这个输出一和这个呃抓手的这个 tcp 给它对应上,然后这边啊,这边应该是输出 e, 我 选一下 c 套的, 然后 c 套的一输入就是复制一,我看一下, ok, 然后这里还有是,呃,我们要把信号连接一下啊,我们点击信号,然后点击接币, 然后我们找这个三 s 的 话,呃,我们让它这个布尔信号和这接币输入进一个连接, 然后这里输入,我们可以改成幺零幺,就像他之前说的,之前的张姐说的,我们尽量用一百以后的型号,对吧?一百零一,然后我们让这里他呃输, 让机器人 wait 一个信号, wait 幺零幺处,然后当机器人这个信号之后,然后他过到这里,然后进行一个抓取好,我们运行一下,模拟 好,抓起来之后,然后我们让他这边呃放置到这个位置, 我们直接按住 shift 键,然后给它拖动一下, 然后我们点击一下记录这个位置, 我们这里备注一下,比如说,呃,我们可以写一下这里,这里是 p, 是 一个 place, 这样可以知道我们自己每一行做的是什么事情。然后这边一个点位,然后我们再记录一下一个过渡点, 把两个记录点给记录下来,然后我们把这个顺序调整一下,就是过渡点,然后放置,然后再回到过渡点,然后我们点击这个放置位置一样的,我们需要呃 给个 c 套的,然后让这个一这个信号为零,然后就是放同样的,我们再给个延时零点五, 然后让再让接币回到一个等待位置回到这里,每次回到这, ok, 我 们再运行一下模拟 好, ok, 那 么这就做了一个简单的搬运的场景,然后我们看一下,比如说如果我们现在选了一款接币,对吧?我们如果,比如我们想选用其他品牌的,因为我们 在正常做授权方案的时候,我们可能用了一款接币之后,仿模拟之后,可能这款币我们可能比如说它的行程啊啊可能不太合适,或者是我们想看一下其他品牌的接币,它是不是合适,对吧?那这里的话我们怎么操作呢?我们可以点击开始, 然后我们到这个电子目录里面,比如说我们找一下,比如说我们想,比如我们想选用库卡品牌的,对吧?那比如说我们按照制造商分类,我们可以来到库卡这个品牌里面,比如说我们 我们找到库卡, ok, 我 们找到库卡,比如说,然后我们找到 robert, 我 们选一款阶壁,那这款壁大概一米八左右啊,比如我们可以选一个类似的壁展,比如说我们可以选个 对,比如我们选个一米八的臂展,这里有 k r 幺二零的,我们给它拖进来, 然后在这里的程序界面,我们这里点击这个更换机器人,我们可以先选中这个需要替换的,对吧?然后点击这个更换机器人,那么这个这边有黄色的机器人,我们再点击一下啊,它变绿了,然后我们点击一下应用, 那么大家可以看到,那么这里它这个库卡接币就已经替换上来了,对吧?然后我们看一下,我们再点击原来这个 vc 自带的接币,我们点击一下,那么它这里面程序界面里面的所有子程序,这些程序啊,子程序应该都没有了,对吧?那么我们再看库卡程序里面,那它这里面就继承了这个, 先把这个原来 vc 这个接币里面程序啊全都过来,比如说包括一些信号啊,一些位置信息都过来了,我们再点一下,模拟 好,大家看到这个程序它也完全可以运行的,对吧?因为这两个币展是相似,它有一定的荣誉,对吧?那么它继承了呢?这里替换了哪个东西?我们可以看一下,比如一个就是 这个阶币本质是更换了,还有这里面附带的一些程序都已经继承过来了,然后还有就是这个末端工装,对吧?它末端工装它也是 p n p 也连接上的。然后还有就是我们可以看一下这个信号里面, 对吧?那么他这里本来之前是用 vc 这个程序的信号幺零幺和这个森森这波尔信号连接,那么现在变成库卡这个机器人和信号连接,对吧?那他主要这部分都有一个继承过来, 然后大家切换时候要注意,就是基本上我们要找这个呃 b 展类似的,比如说我们如果,那么这里可以,我们可以尝试,比如我们选个小 b 展的,比如说我们 t r 十, 我们选个小壁展,我们试一下,看是不是可行。我们直接点这个,然后点击程序,点击更换机型,那么这里黄色,这里几个,那么这里显示黄色两个两款币都可以用来做替换,对吧?我们选择这个小壁展的点击应用, 那大家可以看到,那么这个小臂展呢?他这个我们选择之后呢?他这里就这个臂展有点极限,对吧?我们在运行仿真,那这就有个报错,一个是他这个超过这个臂展的一个限制啊,就是这个关节的一个三关节超线啊 啊,这个超限是因为这个我们把它调整一下,我们把这里面的输出信息,我们可以把它清除掉,然后点击模拟, 大家可以看到这里显示的这个 k r 十,这款 b 两九百,这款机器人在 p 二的 p two 的 位置到达位置可达范围之内,也就是说这个 p 二点就是我们看一下它的, 看一下也就是这个点,那就是过渡点他也到不了,对吧?大家看已经已经是这里关节的话,已经是五关节已经飘红了,对吧? 那么就通过这种方式大家就可以,我们就可以,比如说日常工作中我们就可以看一下,呃,选了一款阶壁之后,我们想快速的更换阶壁,看他是否可行,我们就可以这样的一个操作啊。 好,那么以上就是呃机器人的一个替换操作啊。
 11:05查看AI文稿AI文稿
11:05查看AI文稿AI文稿大家好,呃,我相信大家都在设计一条自动化产线的时候,哎,担心这个方案是不是可行,然后或者是一些兼集成商啊,或者是这个终端客户再花费巨资购买一条一条生产线或者设备,钱, 呃都希望这个全方位的寓言整个生产流程,对吧?那么这个正是我们这个 vsc 服务器软件呢,它所带来的一个现实,那么我叫小吴或者叫蜈蚣都可以。那么我是一名深耕自动化行业多年的一个工程师, 那么今天呢,我正式呃启动我的 visor components 这个仿真软件系列视频。然后呢作为这个先导片呢,我就我想跟大家一起聊聊这个呃强大的一个工具,然后呢并且聊一下我和这个软件的一个故事, 然后呢呃作作为这个仙岛片呢,我想从三个方面和大家开始聊,那么第一个呢就是这个呃软件的一个功能介绍,那么第二个就是我这边的一个使用经历。然后第三个呢就是我制作这个系列视频的一个初衷, 那么它是一款全球领先的三 d 工业自动化仿真与这个数字轮生平台,那么我们可以理解它是一个功能无比强大的一个数字沙盘, 那么他的核心价值在于,呃能让我们在电脑里面呃设计、模拟和优化整条生产线,然后物流系统啊,那么第一个就是一个海量的一个组件库,大家可以看到我们在这个所有模型里面大概一共有三千多个,呃一个完整的树模,还有很多这样的一个布局, 然后同时呢他可以实行这个高保真的一个仿真分析,那么可以精确的模拟设备的运动、物料的流转,以及这个生产节拍啊,产能瓶颈做一个深度分析,还有就是帮我们提前可以解决一些潜在的问题。 那么第三个呢,就是一个数字化的一个授权与体验,就是我们可以生成一个逼真的一个动画,或者是一个交互式的演示,那么可以给客户一个沉浸式的体验啊,当然可以帮助一些销售拿下这个项目,然后从, 那么总之呢,从概念设计和方案验证呢,我相信他都是一个非常好的一个工具啊。我们可以简单的看一下,比如说他这里面有一些相关的一,比如这个里面按类型的话,他有不同的 组建,对吧?比如说一些基础的一些模型啊,还有一些呃相机,然后一些输送线或者一些设备,然后还有相关的一些呃 g a b 啊,这里面有有很多一些机型的一个树模, 对,然后然后这里面还可以做一些,比如说一些工艺的仿真,我们可以做一些呃一个整条的一些输送线或者工厂的规划,然后建模里面它可以做到一些。这个,呃我们从 主流的三 d 设计软件里面的树模啊,可以导入进来做一些参数化的整理,呃,比如说可以为它赋予一些属性或者一些行为啊,然后这些程序界面呢,我们可以 对工业机器人或者写作机器人整,比如说这些机器人啊,还有一些我们自己做的一些设备,可以做一些这个呃程序的一些试教,对吧?然后还有一些碰撞检测啊,或者做一些后处理,然后同时我们可以把这个呃深层的布局,然后可以输出成图纸,然后同时在软件使用方面他这里提供了一些帮助文档, 一些在线帮助文档,还有一些学院以及在 youtube 或者是推特上面都有他们相关的一些案例教程啊。 那么这个就是我们说的第一块,就是这个软件的大概这一个呃他可以实现的一些功能,我和做一个很好的一个工具啊。然后呢第二块呢就是 那么第二块就是呃讲一下我的一个使用经历,那么我在最开始使用这个软件的时候是在二零一六年,那个时候它还是一个三点零的版本啊,当时,呃 那时候刚毕业不久啊,然后我就一开始用这软件,当时觉得软件基本上眼前一亮,然后呃他完美的结合了我们这个机械设计专业这个背景,还有一个行业的需求。那可以再来看一下,我当时在 呃三点零版本的时候,大概就这个样子,大家可以看到啊,这个是之前呃我刚接触这个软件的时候,他还是在三零零版本,当这个 ui 设计相对还是比较粗糙的,大家可以看一下对 基本之前的一些软件的呃设置啊,都大概这个样子,对这里 ui 设置相对比较粗糙。然后大概在 一七年到一八年的时候,然后这个软件就迭代到了四点零版本,然后基本从四点零版本之后就是大家目前看到我这边用的是 呃四点一零版本,然后基本上这个界面和开始的四点零基本没有太大区别啊,主要是一些功能的增加了一些功能,基本整个 ui 设计就是没有太大变化,基本上算一个是从三点零到四点零,基本上是一个比较大的一个 变化,一个巨大的飞跃吧,然后基本特别是界面基本焕然一新,当然功能也变得更加强大了,就是在整个呃主线组一些单站呢,或者组生产线方面也会非常更加方便。然后,呃同时呢,它这里面也是支持这个 python 脚本的啊,这个软件它也会比较方便。 对,我们可以看一下,比如说这个软件里面,它是,呃在这个建模界面里面,它是可以支持这个 python 的 一个脚本啊,直接可以进一个编辑。 呃,像这个当时的话,我,呃在二零一七年的时候,差不多的还是二零一八年的时候,当时也是为了 呃学好这个软件,然后当时也是差不多也报了一个在线的培训班,当时因为那个时候 python 和人工智能比较火,当时我刚也报了这个班,一个也是为了呃更好的用好这个脚本软件啊,然后差一点就 投身当时这个呃 ai 的 一个热潮啊,差点可能是转行为程序员了啊。呃,也去一些高校还有建林所的讲台上授课分享,然后之前也帮苏州的所大学录制了系列教学视频, 然后到现在呢,也一也在微信群里和一些同行爱好者一起交流答疑,那么我越来越深刻的感受到分享的一个价值和乐趣啊。那么这是呃我自己大概使用软件的一个经历。嗯, 然后第三块呢,就是制作这个系列视频的初衷啊,那么就是 呃正因为这些年的一个实践啊,自己自己的使用啊,还有一个,呃之前和学校高校一些教学配合,让我发现问题是,就是目前在网络上关于这个 vc 的 资料,特别是中文网络上面这个资料 比较少,而且很多朋友反映这个学习路径非常的零散,然后缺乏一个系统化,从入门到精通的一个指南。 那所以呢,我自己呃决定开始启动这个系列视频,那么我的目标也比较明确,就是把我从二零一六年至今积累的啊,所有知识,项目经验以及教学心得啊,然后一手兼顾, 呃教育心得,然后进行进行一个系统化的梳理,然后打造一套结构清晰,易于上手,然后兼顾基础与实战的一个 vc 这个学习指南啊,然后这边是我呃大概做了一个, 做了一个图啊,一个思维导图,然后主要会分为这些方面。第一个就是呃软件的一个 软件介绍啊,可能会包含这些功能,比如说软件导航啊,一些选择啊,页面介绍,还有一些测量啊,导航,然后这些视觉视角切换,以及一些嗯操作。然后还有就第二块就是一个布局搭建,我们可以了解布局界面里面的一些依附功能啊,坐标系的转换,呃,然后其他的一些, 然后第三块就是机器人的编程,然后这里面包含了呃以下这些,比如机器人的信号连接啊,然后主要是机器人操作,比如抓取释放啊,这些工具的安装,然后还比如这里一些 evo, 还有一些自动捕捉,然后还其他一些贝斯 tour 的 一个运用。 然后第四块就是组建建模,这里会呃教大家做一些树模的一些轻量化处理等等。 然后第五个就是物理引擎,这块可以做到,比如说实体的碰撞效果,然后物理的,物理的这个供料器,然后还有输送线,然后容器啊,然后还有一些关节,比如柔性关节和一些固定关节的一个创建。然后第六块就是 拍摄脚本,然后这里面我会给大家介绍,比如说啊,如何读写进行的脚,进行的程序啊,然后控制一些关节,然后比如说一些凸显,一些高量组建,然后还有一些错误管理,然后控制四幅控制机型,然后还有一些其他的抓放抓取啊,或者拆码垛等等啊。 然后第七罐就是呃到时候会以一个案例的方式给大家讲一下工艺的模块,就是呃从零开始搭一个完整的一个呃输送线啊,一个整体的一个一条线体。 然后另外还有就是呃比较丰富的一些插件,就是网上,网络上也有啊,但是可能缺乏一些具体的使用介绍,那这里我给大家 一起分享一些插件,然后一些插件的使用。还有第九块就是呃这个 motion tending 这个功能就是软件库里面的,然后还有就是有些呃第十块就是一个案例分享啊,然后十一就是一个 agv 的 一个 物料的一个输送,然后这里会讲一下,然后另外就是呃如果大家如果有一些问题可以在评论区跟我沟通,我可能会就呃再出一个视频做一个解答啊, 那么这就是大概是我的一个大概的一个规划,然后呃这个软件呢一直在更新,那么我这边我也会坚持学习,然后同时呢,呃学习的同时把这个学习的成果给输出出来,然后把这个视频 持续的迭代,那么我希望这不仅仅是一个视频,然后希望他能成为一个长期陪伴大家共同学习和成长的一个知识库啊。在这个系列视频里,我会从这个界面的熟悉啊,然后一步步深入到建模的技巧,然后还有一些这个,呃 编程逻辑也是 python 这块,还有这个仿真分析已到实战里解析,我相信大家无论是刚接触 vc 的 新手,或者是希望提升技能老用户,呃,我这个视频都能给大家带来这个实实在在的收获。 然后如果这个视频是大家后续的这个教学视频是大家需要的,那我希望大家能够给点击一个关注,然后关注我后续视频的一个更新。那么 从下期视频开始,我将呃给大家从这个呃软件的界面呃开始一个介绍。啊,好,我们下期视频,嗯,再见。好,谢谢大家。
 11:18查看AI文稿AI文稿
11:18查看AI文稿AI文稿呃,这节课给大家讲一下这个机器人这个碰撞,或者是,呃我们我们或者叫做干涉检测啊, 那这个碰撞检测呢?首先我们可以沿用上一节的这个布局,然后我们选一个 rubber tour, 在 这工具里面选择。呃,我们有以这个焊枪为例啊,我选一个,然后利用偏僻功能,然后把它给装配上去, ok, 然后他这个在这个碰撞检测,在这个程序界面里面啊,在这个程序界面里面,然后我们可以,比如说我们可以起用和不起用碰撞检测, 比如我们这里,呃,我们先不起用碰撞检测,我们看一下,比如说我这里在试教时候,对吧?这个焊枪往下撞的时候明显是有个撞击的,但是他这里是没有任何的响应啊,也没有,比如说一些颜色显示啊,或者是停止,那比如如果我们点击这个起用, 起用这个减探测器,对吧?然后我们再试教一下,大家可以看一下,那么这里焊枪和这个撞击的时候,我们就可以看到他这个焊枪,焊枪和这个桌子,然后是有高亮显示的啊, 那比如我们再选择接臂啊,接臂我们再一撞的时候,大家可以看到,那么它这里就会这个接臂,这位置就会一个高亮,我们再往上的时候可以看到它这个接臂也会也会一个高亮的一个检测啊。 ok, 然后我们可以看一下这个探测器,有个编辑对他这里有,比如说是,呃,他看谁先碰撞,比如检测到某一个先碰撞的时候,他只他只是监测这一个,谁先碰撞,那就检测哪一个。 那如果,比如说我们把这个全部打开,那它检测就是说它显示所有的碰撞,就哪个节点碰撞它都会显示出来,我们再点击出来看,此时它就会显示啊,这个焊枪和这个节点和这个接臂这个关节啊,都有一个碰撞啊。 对,那这就是一个,首先和这个它这是一个 first, 就 谁先撞了,就先检测哪一个啊?对,那现在是 b 撞了,那它就显示这个 b 在 此时此刻它是 b 是 撞的,对吧? ok, 然后, 呃,然后呢,比如说我们还可以自己再新建一个,比如我们点击这个碰撞检测器,然后那么比如我们这里, 呃,他这里是只能是选择一个啊,选择一个产品,然后和这个整个 3 d 世界的做一个检测。那么一般呢,更多情况下,我们希望有两个组建之间,比如说接臂和安全围栏呢,或某个产品之间啊,一个碰上检测,对吧? 那么当然他这个碰上检测呢,比如也可以是多个组建,或者是单个组建都可以啊,那这里我们就可以自己自由选择,我们点击添加, 那这我们可以添加一个,添加一个碰撞检测器,对吧?那么因为刚才我选择了接 b 啊,所以他这里默认就把接 b 作为 a 组键,然后这个三 d 世界里面其他的组键作为 b 组键,那么 a 组键他是用绿色表表示,然后 b 组键呢是按照这个蓝色显示。 那么那同时呢,我也可以,比如 a 组件里面,比如说我啊,这个机座我不需要了,那我把 a 再点,我们把这个删除啊就可以,对吧?如果你需要的话,你可以在这里面 a 组件里面可以,比如你可以直接点点击 a 组件,或者是在这里点击添加选择都可以,对吧? 那这是这个自由的添加啊,那比如说这个我可以把它关掉,删删除,对吧?那这里是启动,这边是个删除。那如果,比如说我要自己自己自由选择 a、 b 组键的话,我就比如说我你鼠标可以在这个界面里面空白处点击一下,然后再点击添加, 点击添加碰撞检测器,那么此时 a 和 b 它就是空的,对吧?那我可以,比如说我选择这个接 b, 我 选择一下,然后这里会出现个 a 啊,然后这里或者添加选择都可以,或者选择接 b, 然后选择天机 a, 对 吧?然后我们这里选择接 b 这个 他这个组件啊。呃,如果,比如说我可以也可以直接这样的,你可以点击添加编辑器,我们把这个, 比如我们空白处,然后点击添加添加编辑器,然后比如我选择这个枪,我点击 a, 然后再选择,呃,这个接币我们也选择一下啊, 然后这个桌子就选择 b 组键,对吧?呃,然后那么这就是我这边新做了一个碰撞检测器,然后这个名称呢?大家可以根据,呃,比如说我们可以选择,比如 说 v s 啊,比如我们说 table, 哇这个名称大家给自己进行选择,然后这个已经讲过了,然后碰撞距离是这样,比如说啊,我们宣传焊枪,比如或者设备离围栏多少公分的时候是没有问题的,如果比如少于多少毫米,我们觉得就是这个是距离太近了,有风险啊。比如这里可以设置一下,比如我设置这个误差,比如 三十毫米,我们显示最小距离,那么这里再运行一下,大家可以看到,那么这是我我这里往下探的时候啊, 那么它这里就显示跟这个 g i b 啊,只有二十二毫米了,对吧?它这时候显示已经 实际上我们这里还没有碰撞到,大家可以看到这里其实还有二十二毫米没有碰撞到,但是呢这里因为有个误差,对吧?按键碰撞误差, 我们就显示如果他低于三十毫米,我们都认为有碰撞风险,或者我们可以高点显示,那么做在这个做收钱方案时候就可以这样考虑,对吧?比如微澜,我们可以离哎,这接地离微澜有三十毫米以内,我觉得有风险,那我们可以提前做一个规避, 然后这是就是一个显示最小距离,然后忽略最近的节点的话,就是指这个呃 g b, 他 这个 呃父子节点啊。比如说我们可以再建一个把这个,那这个就碰上检测,就这样的,然后他做一个碰撞,当然在这个节点里面,比如说这个关节里面,他里面也会有一些这个不同的关节,我们这个关节可以一个个勾选掉都可以, 比如说某个关节不想他检测他是否碰撞,就把他取消就行了。 ok, 然后我们把这个关掉, 然后我们再选一个,我们再添加一个,比如我们选择这个接臂啊,我们选择接臂这个 这个焊枪,把这个先删掉吧。 ok, 我 们选择这个焊枪,然后我们再添加一个自我碰撞检测啊,比如说我们有时候我们做了一个甲爪,对吧?我们担心这个甲爪可能是不是跟本体有一个干涉,对吧? 那我们就可以添加一个自我碰撞,那这自我碰撞里面,比如说我们就可以,呃,他默认的话是忽略最近的节点和忽略不同的组建,那我们刚才说了忽略最近的节点,就是说他们比如这个焊枪啊和这个 六周法兰啊,他们就是一个最近的节点,或者是一个副节点,对吧?那我们要忽略。如果不忽略,我们点击框选一下,你看这里他这个英文刚才选的焊枪,那这个节点跟这里 它就默认的,因为你最开始选的这个位置,所以它这里显示的,呃,就有个碰撞啊,你把它忽略,那这忽略不同的组建什么意思?比如说那么这个机座 接臂和焊枪,他们就是三个不同的组建,对吧?如果我们点击这个不忽略组建的话,我们再把这个接臂再试教一下,点击点动, 我们往下拉,我们就让它去撞一下这个。大家看到这里,我们我们自己自身的话,呃,我们选择托尔,选择这个 t c p, 选择这个 t c p, 然后我们 碰撞一下,大家可以看到那这里,那么我们这里如果撞到了机座的话,对吧?他这里就会有高亮显示,那如果比如我们把这个 忽略组键给关掉,那么我们再点击碰撞这个碰撞这个机座的时候,他就不会一个高亮显示啊,这里根据实际情况可以做一个选择,对吧?我们同样的忽略这里,然后我们往上抬一下, 对吧?我们撞到自身的,对吧?也是不同的组建,我们这个焊枪,他撞到这个 g 坐标也会有一个碰撞检测,一个高亮显示, 然后同样的话这里面组件也一样的,大家可以根据比如他这些节点都会出来,大家可以根据实际情况做一个勾选,哪些组件可以忽略的话,可以把这里就给点选掉就可以了。然后, 然后还有这就是碰撞停止,比如说我们在运行模拟的时候,比如说,呃,我碰撞的时候,我需要他做一个停止,对吧?我们可以做一段呃简单的简单的程序啊,比如说我们做一个碰撞检测,然后我们 把这个都打开,好吧,我们大概做一个,比如我们点击这个程序,在这里是这个点,然后对下去, ok, 然后 我们这里找一个碰撞,他这里没有碰撞,我们可以 新建一个碰,我们点击这个点击这焊枪,我们新建一个碰撞,好吧? ok, 然后我们再运行一下程序, 大家可以看到那么这里啊,他只要一碰撞时候,他就会一个就会就会停止了。当然这里运这个仿真的运行速度也会影响到你这个碰撞这个位置,比如说你这个速度如果再慢一点的话,他这个碰撞呢?就是我们有个三十 看在这个位置,他就会,对吧?就已经停下来了。那么仿真速度跟这个碰撞,比如说他在哪个停的话会有一定影响,对吧?这就是检测碰撞时停止, 然后就是大家可以在呃平时要做售前方案的时候,你可以呃通过这种把这个碰撞检测,呃在 b 在 整个布局啊,然后搭建好之后,然后程序都做好之后,可以提前呃,可以新建几个 碰撞检测器,然后可以提前呃防止你这个接臂跟那个周边的设备一个干涉,以及呃接臂和接臂的夹爪或者是末端工装和自身的一个干涉啊。然后还有就是可以提前通过那个 做一个安全的距离这个预留啊。那么以上就是呃本节课的全部内容,谢谢大家。
 06:49查看AI文稿AI文稿
06:49查看AI文稿AI文稿这这节课给大家讲一下这个机器人呃连接这个外部轴啊, 然后一个是机器人外部轴,主要是第一个是连接这个呃地轨啊,或者是三座标这种,呃三座标这种龙门架这种,然后还有就是呃跟着外部轴的一个,比如说变位机样的一个配合啊。 首先呢我们先看一下连接外部轴啊,我们呃先从收藏里面,我们呃点击一下这个选一个接币,是吧?然后呢这里我们再选择,比如说有一个呃地轨,对吧?我们可以我们选择一个地轨, 然后这个它在这个里面,在这个我们选择 robert 的 这个 person, 对 吧?这里面有很多这种 呃外部轴啊,或者是三轴,我们先选一个单轴的这个地轨,对吧?比如我们选择一下,然后用偏僻功能给它添加上去,把这个碰撞检测关掉, 好,我们看一下,呃,我们把这个附加上去之后,这里就会显示一个机器人这个外部轴,会啊会选择出来,然后这时候呢我们就可以通过这个点动的方式,我们也可以 来这个视角这个外部轴,或者是在这里进一个拖动啊,或者输入数值的,比如说我们需要他每次不进,比如说五百,对吧? 那他就移动五百的距离。咱们这里的话,这个有个地轨添加之后呢,比如说我们就可以让接臂,比如说在先在 a 点啊做一个操作,对吧?让我们视角一些位置,比如说我们把这个点记录下来,然后在这操作啊,然后呢再移动, 移动到这里,我们把这点记录下来,然后比如我们再让他一个操作, 是吧?然后这点记录下来,然后在下一点之后,同时呢他也可以呃接臂和这个外部轴是可以同时动作,我们就是地轨一边动,然后接臂也在一边动,那我们可以怎么呢?比如我们在这里,我们让他移动到这里的时候,让接臂 呃下降到这里,对吧?然后就是我们把这个点记录下来,好,然后我们运行一下模拟,那首先接臂运动,然后走, 然后到这边来之后再走,然后这边到第三个位置就是一边走,然后他呃接臂一边运动,对,那这就是添加一个外部轴,同时比如说我们可以同样可以添加一些龙门架,对吧?比如说我们把这个家伙随便随便拉一个过来,对吧?一个 点击开始用 ppt 功能把它给拖这上面来, ok, 调转在这里,那我们再点击这个界面,我们看一下它在这个程序里面,啊,这里 啊,它这只有一个关节吗?啊?这里只有一个,没有旋转,我们找一个其他的看一下, ok, 这有不同的关节,比如说这个我们把它拖过来啊,我们选这个 结闭,然后点击程序选择偏僻,然后把它给移到这边来,然后再点击这程序界面,然后再看时候,那这边它就有两个关节,对吧?一样的,我们可以把这个程序给删掉, 重置一下,然后比如我们这里同样的方法,比如我们可以呃点击拖动这个位置,然后比如在这个轴我们动一下,然后视角,然后同样的接臂做一个动作,对吧? 然后我们再回到另外一个位置,线位打开,然后移动位置,点击视角点位, 你看这里他就会有个多这个几个轴进行一个联动的一个效果啊,那么这就是连接这个机器人这个机座这一块的,就是跟机器人机座这块连接的一个外部轴,就是比如说机座或者是龙门架,对吧? 然后我们再看一下,比如说它跟变位机的配合,那我们点击开始,我们再找一个变位机,那么它在这里面 work piece 的 里面,在这个 rubber work piece 里面,然后我们可以我们可以选择一个变位机啊, 我们选择一个这个吧,随便拉一个进来, ok, 然后看这里有个变位机,对吧?那变位机连接的话,它和这个,呃 机器人这个机座儿,这个这个这个底座儿这块儿不太一样的是,呃,这边是 p n p, 那 这边是一个抽象接口,我们把这个接口给打开啊, 我们点击这里连接的话一个抽象接口,那么这里的话,呃,我们这里写的这个机器人这个 workpiece 的 这个接口,对吧?和这个 它这里和机机器人这个 interface 接口这一个连接,我们可以点击这个接口,我们用鼠标左键,那么此时呢我们有两个选择,一个可以直接连到机座这里,都可以啊,这个黄色区都都可以,或者是连接到这上面都行啊,那这样就连接好了,然后我们再点击这个接币,可以看一下 到程序界面,我们看一下它这里,又,呃,这里同时会添加了一个变位机的一个操作,对吧? 那我们可以,比如说让 j b 移到这个位置的时候啊,我们再可以,比如说,呃,我们再试教变位机一样的也可以通过点动效果,就是让 j 让这个变位机移动一下 视角,然后我们再往上抬一下,然后让激光机一边跟着动,把这点视角下来, ok, 然后我们重置,比如这里 看这里,到这里之后变位机动,然后同时一边往上抬变位机一边转,对吧?这个时候就可以,比如说我们在做一些焊接,或者什么一些场景的时候,呃,比如说接臂,先焊一个,焊一条焊缝, 然后如果这个产品在接臂可达区之外了,对吧?我们可以增加这个地轨,然后同时这个变位机也可以做一个变位啊,然后使这个接臂这个作业区域,呃,让这个接臂可达。对,那么 那么以上就是本节课的内容啊,全部内容了。好,谢谢大家。
 10:09查看AI文稿AI文稿
10:09查看AI文稿AI文稿呃,这节课给大家讲一下这个机器人外部 t c p 的 应用,就是我们让这个呃产品,让这个产品它绕着这个切割头的尖端运动。啊,就做出来会这样一个效果。我们看一下 就是机器人先抓取这个方块,让这个方块沿着这个尖端做一个运动。好,我们就看一下这个案例是呃来怎么一个搭建,我们先清空一下这个布局, 然后我们先找一个这个小桌子,啊,我们找一个所有模型,我们找一个 table, 我 们就用这个小桌子,然后我们在在我收藏夹里面我们找一个这个既然记座但没有的话,就按这个名字进行搜索,我们点个记座, 我们大概一下位置,然后我们再拿一个通用的戒币, 然后利用偏僻功能,然后把这个戒币给装上去, 然后我们再把这个机座稍微调整一下,这个界面我们改成五百。然后呢我们再呃找一个棋盘,啊,我们在这按类型分类里面找这个 robert tour 里面 我们找一个吸盘,我们先这里看到有一个呃打磨一个切割头,我们把这个放这个桌子上,点击这个移动,然后点击捕捉,比如放在这个位置, 然后我们再找一个吸盘。 好,我们就用这个参数化的一个吸盘,然后我们用偏僻的给它装上去,然后我们再呃拖一个方块,用个 basic shape 里面一个这个方块我们拖过来, 然后这个方块的厚度我们可以改小一点,比如改个三十,然后我们把它移动一下。 好,我们这样的话一个简单的布局就做好了。首先呢我们先让这个机器人把这个呃产品给抓起来,对吧?然后我们点击机器人点击程序, 然后我们先设一个记坐标,一个 base 一, base 一 的话,我们就让他这个附加这个桌子上面,因为他待会要从桌子上抓这个产品,我们点击设置,然后点击这个把附加,把附加到这个 table 上面这个桌子上面去,然后我们再 呃兔二一的话,我们也给它设置一下,然后兔二一点击这个小齿轮设置,然后我们点击一下捕捉,然后给它捕捉这个位置, ok, 然后待会的话,因为它这个 turret 和这个 gripper, 我 们让它和这个 gripper, 这个就是吸附上这个自带这个 tcp, 是 呃是在同一个位置,我们可以看一下它这个自带这个 gripper, 这个 tcp 就 在这个位置,我们让它这个 turret 一 也和也在同一个位置啊, ok, 然后我们就这样 face, 然后选择 face, 然后选择呃这个 gripper tcp, 然后我们点击一下捕捉, 选择边和面,然后捕捉这个面心,好,我们把这个点进行一个记录, 然后呢我们再往上拖一点记录,一个过渡点,一个木接一个木 l, 然后把这个抓取点我们放置到这里,我们可以新建一个子程序啊,我们新建个这里点加号,新建个子程序,这个子程序我们可以写抓取产品, 就抓取呃方块儿, 呃,我们把这个里面程序剪切一下,其实一开始大家试教时候可以在这个子程下面试教就可以啊。我们抓取方块儿, 然后波度点的话,我们这边呃我们 c 套的一下,给个 d o 信号,然后 d o e, 然后处, 然后我们给个延时零点五,好,然后我们在主程序里面呃这个调用一下子程序啊,我们运行一下仿真, ok, 然后呢我们再把这个让这个方块的这个顶点,然后对到这边来和这边对齐,点击对齐,然后这边, ok, 我 们把这个对齐,然后对齐完之后,我们在主群里面把这个点给记录下来, 然后我们再点击 g a b, 然后我们呃 base 二这边 base 二呢,我们就需要把它绑定到这个点击设置,然后把它绑定到这个产品就是方块上面 方块,然后比如我们再把它捕捉一下,比如说我们就给它呃捕捉这个位置, ok, 然后我们再点击这个 tour, 比如我们用个 tour 二, tour 二的话,我们这边就一样设置 捕捉,因为我们这个外部 tdp 的 话,所以我们需要把这个呃接臂的这个凸耳绑定到这个切割头上面去啊,然后同样的我们需要,然后再给它捕捉一下,捕捉到切割头这个位置, ok, 然后呃像这种外部 t c p。 一 般比如说我们用一些涂胶啊,或者一些比如产品需要,呃,比如产品是放在阶梯的末端,然后打磨头在一个固定位置,对吧?或者一个打磨的位置,呃,这种工况,比如一些涂胶或者其他一些应用就需要。呃 产品放在阶梯末端的情况下,然后工具不动的时候,我们就需要用的这种外部 t c p 啊, 那这里相当于是呃之前的话,它正常的话就是 g a b 的 t c p 动到哪,机器人动到哪,但现在呢?我们叫 t c p 固定不动,然后机器人移动,对吧?那像是把呃 t c p 当贝斯用,这个贝斯当 t c p 用啊? ok, 然后这样的话,我们我们检查一下我们贝斯贝斯二的话,我们给它绑定到这个 产品这个产品上面,然后它的位置在这个呃产品这里,然后我们看一下这个兔二,兔二的话,我们把它绑定到这个切割头上面啊,然后它也是贴皮在这里,在这个切割头这个位置固定。 ok, 然后我们再新建一个子程序,新建子程序我们这里写个外部 t c p 外部 tcp, ok, 然后这里的话我们先给它运行一下, 好抓取到这个位置,然后这里我们在外部 tcp 里面,我们点击机器人, 然后点动里面,我们这里选择这个 base 二,然后再选择这个 tou 二,那这里我们选择完之后,这设置好之后,它这里这个外部 g c p 会直接启动,变成处了,这样就直接启动了,因为我们把这个 tou 呃绑定在外部一个 呃一个组建上面去了,就是我们把 g c p 的 一个 tou 绑定到外部,所以它这里这个外部 g c p 直接启动了。 好,我们选择一下这个子程序,然后再点一下接币,然后点击点动,然后把记坐标选成这个 base 二,然后工具的话我们也选这个拓尔二,这样的话它就启动了这个外部 tcp, 它自己会变成触,然后我们需要这个点击这个 自动路径啊,点击自动路径,我们在外部 tab 外部 tab 这个子程序里面点击自动路径,然后我们捕捉一下 这是第一个点第一个路径,然后第二段,然后第三段,然后再绕回来。 好,我们点击这个生成,然后在主程序里面,我们在这个呃,调用一下这个子程序,调用这个外部 t c 一 这个子程序,然后我们再呃运行一下仿真 抓取方块,然后移动到过渡点,然后模拟我们看一下抓取过渡点, 然后我们还可以给它呃,在最终点的话,我们可以比如说给它呃回到 home 位置,我们给它试教一下,回到 home 位置之后,这个时候我们让它退出这个外部外部 tcp, 我 们就可以这里选择这个 base 一, 然后我们一样选这个 gripper tcp, 然后把这个点进一个记录下来。 ok, 我 们再运行一下,先抓住这个方块,然后沿着这个轨迹啊做一个移动,然后回到这个 home 点。好,那么以上就是这节课的全部内容,谢谢大家。
 06:21查看AI文稿AI文稿
06:21查看AI文稿AI文稿好,今天给大家讲一下这个机器人这个轨迹跟踪啊,那么因为有时候呢,我们需要把这个机器人的 tcp 的 轨迹给显显现出来,对吧?那怎么操作呢?我们一起看一下。 首先呢我们先搭建一个简单的布局啊,我们呃先在这个收藏里面搭建一个简单布局,我们先找一个机座, 然后再用这个通用的这个接口,然后我们用偏僻功能,然后给它装上去, 然后这个尺寸稍微改一下, ok, 然后我们再呃装一个工具,简单随便装一个工具上去, 机器人的工具都在这个 rubber tool 这个下面啊,我们直接选一个这个尖的,选一个工具,然后装上去,然后呢下一步我们再找一个这个小方块啊, 方块我们放上去,我们搭建一个,先,我们直接搭建一个简单的布局,然后这个尺高度我们七百,然后八百, 好,然后我们就搭这样一个简单这样一个布局, 然后比如说现在我们需要这个接币,比如运动时候把这个 t t 轨迹给显示出来,对吧?我们先简单做一个编程,先点击程序,然后点击写作弊,然后我们每次编程的时候,我们需要选择一个工具, 对啊,我选个 t c p, 呃,它这里工具自带了一个 t c p 啊,我就选一下这个自带的这个 t c p, 然后这边就是那个呃 t c p frame 啊这样的比较的末端,然后我们给它施加一下, 然后比如说阶梯的初使姿态,比如如果我们希望这是它这个初使姿态,这个 home 姿态的话,我们可以点击这个下拉箭头,然后点击这保存姿态,对吧?这样的话每次我们点击这个复位,它就会 在这个位置,比如随便我们挪动,是吧?我们随便挪动之后,然后再点击复位的话,它都会回到这个 home 位置,然后我们再做一个编程,比如我们先我们点击捕捉,然后我们随便画一个图形啊 这个点位,比如说我们点击到这个位置,先做一个过渡点,然后到位,然后我们再点击捕捉, 然后再记录这个点位, 然后捕捉,然后再同样的记录,我们就这样依次的操作, 把这依次的记录这个点位,然后 再捕捉这个点,把第一个点可以再如果复制某个点,可以直接把某个点击一下这个点,然后呃直接复制一个,我们再记再记录一下也可以,然后把它拖到最后,然后再回到这个 home 位置,对吧?把这个点也复制一下, 好,我们点击一下仿真, 第一个点还没有复制过来啊?再复制一下,点击再记录一下这个点,点击一下仿真, ok, 然后比如说我们想把这个轨迹 t c p 的 轨迹给显示出来,怎么操作呢?我们给之前我们讲过,呃,一到一十六,是吧?是一个默认的一个工具,对吧?这个点击这个写作弊, 点击这个接币,然后我们看这里,我们之前讲过,一到十六是默认是这个抓取和释放,那么他从十七到三十二开始都是这个, 呃,轨迹跟踪啊,从十七开始,只是他默认这个颜色不太一样,对吧?比如十七是这个红色的,然后像其他的他这个是蓝色的,对吧?不同颜色,从十七到呃三十二都是这个轨迹跟踪从三十三开始就是快换工具了 啊,就是工具的一个安安装,那这里我默认,比如我们可以选用十七,对吧?我们选用十七,然后刚才我们需要,然后这里使用的工具我们需要跟它对应上,我们可以选上这个 tcp frame, 然后这边的话一个跟踪关闭的时候也选择这个, 呃, tcp frame 选好, ok, 然后我们再从跟踪点开始的时候,比如从 十七这个点,我们点击这个 c 套的一十七,是吧?点击开始跟踪,然后这个点跟踪完之后,让我们点击这个一十七给它 force 掉, ok, 然后我们点击开始, 对吧?大家看到我们就这里它就如果显示到这个 t c p 从这个位置,对吧?这个点开始之后,从这个点开始跟踪,对吧?然后显示这个画出这个, 呃,差不多一个五角星的一个形状,对吧?然后当然如果我们想从这个点开始,我们就把它从哪个天开始,我们就往下再拖一个,那么它就会从 p 一 天开始啊,然后我们看一下, ok, 那 么这就是我们呃这个 t c p 的 一个跟踪的一个小知识点啊。那么以上就是这节课的全部内容,谢谢大家。







