珞石机器人怎么导入文件

粉丝292获赞640
相关视频
 02:10
02:10 02:46查看AI文稿AI文稿
02:46查看AI文稿AI文稿大家好,今天给各位分享的内容是属于基础操作,分别是注视的修改,导入和导出。从注视的修改开始说起,可允许我们修改的内容主要是变量和信号的注视,比如说常规的批变量, i 变量, d 变量。信号上面,比如像输入输出模拟量或者是辅助继电器,在界面上面向左边图中所示他的操作。首先我们能从监视 信号输入口界面进入到监视界面,第一步是双击需要更改的注视, 第二步是输入更改的内容,可以输入我们想要的文字,比如说轻钢,打开点,夹紧点, 检测到位,输入之后点击确认这里有个注意的点。只有在二零二一年下半年之后的软件版本才会 允许在建设界面下面可修改,在二零二一年以前,这里的文字内容是不允许这样直接来修改的。然后还有一个方法二 啊,先说完了导入,导出之后再来进行描述。注视的导入和导出,首先是把 u 盘插到 usb 接口上面,然后到试校期的界面左上角文件操作的第四和第五项分别是导出和导入,选择对 应的需要保存的注视,点击文件操作注视保存到 u 盘就保存进右盘了。然后关于导入,其实跟导出 u 盘是类似的一个操作,然后我们知道了可以这样来导入导出,那么修改注视的第二个方法 也就很容易就能理解了。导出的文件已经存到了 u 盘里面,图中是解释 这些文件各自代表着他存的是怎样的内容。我们如果把 u 盘插到电脑上面,应用记事本或者是楼底盘的就可以打开这个文件,对应的可以来修改里面的内容, 修改完了之后保存再导入到系统里面。这里有特殊的说明,修改注视一定是 能更改注视内容,不能动这些符号序号。好的,以上就是关于注视部分的内容,谢谢。
 02:53
02:53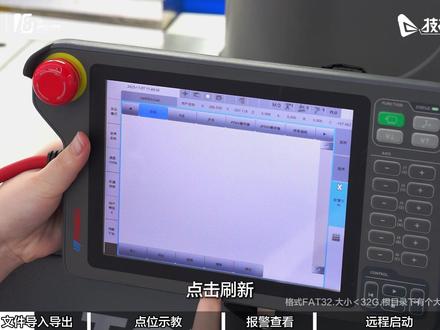 02:14查看AI文稿AI文稿
02:14查看AI文稿AI文稿新手操作机器人是不是也遇到过这四大难题?程序文件不会倒,精准点位不会叫,报警信息不会看,远程启动不会配!今天这期保姆级教程带你一次性全部通关。 点击菜单,系统升级配置文件进来之后插入 u 盘, 点击刷新导出输入名称,确定导入时选择你需要导入的项目文件,点击导入,勾选你需要的内容,点击确定之前重启 菜单数据,位置点修改新建输入点位编号,刷新点位可以记录此时的位置,保存则进入下的这个位置,比如我移动一下记权, 手动上电,长按移动,选择你的运动方式,比如曲线,机器人可以移动回去, 此时机器人正在正常运行中,出现了报警,例如极频等,此时点击报警信息,当前报警可以看到所有的报警内容。双击我们需要的报警信息,有报警处理方法,当我们的极频复位之后,点击叉复位,即可以复位掉报警。 点击菜单工艺系统状态,这里可以配置我们的输入信号,常用的有使能启动,暂停,停止复位,在这里我们已经全部都配好了, 输出的话是一些需要获得激情的状态,从这里输入输出。我配置完成之后需要开启到远程模式,此时给我使能与启动信号,机器人可以正常运行。远程模式下按下启动,机器人开始运行。 好了,现在你已经可以独立的进行基础操作了,那么接下来你是想学轨迹编程还是故障排查?评论区告诉我,你的选择将决定我们下期的内容。
670拓斯达科技 02:14
02:14













