
粉丝195获赞460
相关视频
 01:13
01:13 00:49
00:49 00:29查看AI文稿AI文稿
00:29查看AI文稿AI文稿app 机器人正在运行的时候,我如果拍下试教器的极品按钮,机器人就停下来了,那么如何让他再次运行起来呢?第一步,我要把这个试教器的紧急停止按钮这样旋一下,这边呢,他会提示我要等待电机开启, 那么我们需要按一下控制器的这个白色的按钮按一下,这个时候呢,他的试照器就显示电机开启,按一下运行键,机器人就重新运行起来了,明白了吗?
865机器人小王老师吖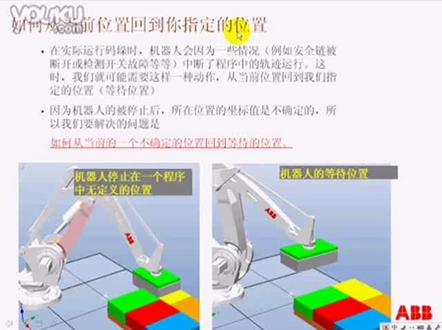 05:00查看AI文稿AI文稿
05:00查看AI文稿AI文稿我们知道在实际运行码多的时候呢,机械会会因为一些情况,例如说安全链被断开,或者说检测开关故障等等的原因呢,中断了程序中的轨迹运行, 这时呢我们就可能需要这样一个动作,从当前一个不确定的位置回到我们指定的位置上面去,就回到等待位置了,就是说之前在一个一段路径上突然间停止了,但停止的位置并不是某一个目标点来的,这个时候呢,我们可能需要让他 安全的通过运行程序的方式回到等待位,然后呢再重新开始, 因为机器人的四倍停止后呢,所在位置的坐标值是不确定的,因为呢从 a 点 a b 两个点之间,你会停在这轨迹中上面 任何一个位置上面呢,我们是不知道的,在程序里面,所以呢我们要解决一个问题,就是如何从当前的一个不确定的位置回到等待的位置,比如说我们看到这里机器人正在进行那个放的时候呢,就在这个位置被一个 外部的信号中断了,或者被整个运行程序停止了,这个时候呢,这之前所停的位置呢,在程序中并没有定义的,那如何从这个没有定义的位置回到我们有定义的这个等待位置呢?在本科里面呢,我们就要解决这一个问题, 其实呢要实现这样一个从一个不确定的位置回到一个确定的位置,也在实力中。就是说回到一个等待位置的话呢,其实我们很重要的 就是使用了我们这功能 c r o b t 来获取我们机器人当前所在位置的位置的坐标数据,然后呢通过这个坐标数据呢进行一个 木 l 啊木这这样的移动的,然后呢机器人获得了当前位置以后呢,然后我们通过上升到一个安全的位置, 通常的情况下呢,作为搬运机器人呢,可能越高的位置对于他来说是越安全的。一般来说,我们获得了当前位置的以后,我们都会在 z 一的方向进行偏移,然后去到一个安全的位置,去到一个安全的高度的位置以后呢,我们再通过 移动指令让他回到那个等待的位置。好,下面我们来看一下这怎么样实现我们这三点所讲的一个内容的指 是怎么样编写的好,在程序编辑器里面呢,我们写了这样一段一个子程序,是用于机器人从一个不确定的位置回到一个等待位置的, 那怎么用呢?你看一下是怎么写的。首先呢有一个 p current u s 这样一个目标点 robotalk, 这个 robotalk 在定义的时候呢,我们必须把它定义为变量, 千万不能定义为长量,因为只有变量了长进变量和长哎,可变量了才可以在那个 rap 程序里面被腐蚀的。 但是呢,这我们一般习惯会变量会比较方便一点,因为每次上线之前呢,他会都会被抚慰掉的,这样是我们想要的一种特性,记住就是说这必须是一个变量,然后呢用到了我们刚才在 ppt 里面提到的用的那个 功能 c r o b t, 然后呢 c o b t 里面就是说这怎么解读啊?这个就说 当前机前使用的工具是这一个,使用的弓箭坐标是这一个,然后呢在使用这样的弓箭坐标,使用这样的工具的情况下, 机器人的那个坐标数据了,我们要获取的就是在这个弓箭坐标和弓箭工具这样一个情况下的坐标数据,所以呢,我必须在这里要指定我所使用的工具和我所使用的弓箭坐标,然后呢就会获得一个在这两个 数据的一下的一个坐标数据,然后呢把它复制给这个 p current post, 然后呢我们知道这,然后呢我们知道我们机器人要移动,移动到 披烘上面去的,所以呢,我们可以先将机器人提高到一个披烘的高,同一个高度,也就等于在这一方向呢,我们必须让机器人当前一个 不确定的位置,我们看一下提前在这个不确定的位置,所以呢,我们要从这个不确定的位置垂直的完了往上提升,来到了那个等待位置的一个高度,这样再往 那个等待位置走的话呢,就不会上下这样串动,会影响到原来堆放的东西会怎么样了。所以呢,我们的等待位置呢一一般是设在马舵 舵马的最高比那个马的最高的位置还再高一点点,这样子呢,方便我机器人从任何位置回到这个等待位置的,回到这样的一个等待位。
 00:57
00:57 02:03查看AI文稿AI文稿
02:03查看AI文稿AI文稿机器人在运行时会经常出现一些报警信息,下面为大家整理了一些常见的故障代码及建议措施。报警代码,三幺八幺零 dysnit 主控从控电路板缺失说明, dysnit 主控 从控电路板不工作后果,无法进行 dys next 通信。可能原因, dys nex 主控从控电路板出现故障或无此设备。建议措施,确保 dys nex 主控从控电路板已安装。二,更换有故障的电路板。 报警代码三幺八幺幺。第二块的 vs next 主控从控电路板确实说明以配置双显键,但仅安装了一块 dys next 主控从控电路板,后果,仅一块 dys next 总线可用。可能原因,第二块 dys next 主控从控电路板出现故障或无 如此设备。建议措施,第一,确保第二块的 vis net 主控从控电路板已安装。二,更换有故障的第二块电路板。报警代码三,一八一二,不 兼容的 dysnit 电路板说明,系统检测出不兼容的 dysnit 电路板类型后果,无法在 dysnit 上进行通信。可能原因,系统中也安装了不兼容的 dysnit 电路板。类型建议措施,请确保安装了兼容的电路板类型。报警代码三,一八一二,不 兼容的 device net 电路板说明,系统检测出不兼容的 device net 电路板类型后果,无法在 device net 上进行通信。可能原因,系统中也安装了不兼容的 device net 电路板类型。建议措施,请确保安装了兼容的电路板类型。报警代码,三幺九幺零 faber cdp 主控从控电路板确实说明 pro far cdp 主控从控电路板不工作后果,无法进行 pro fabus 通信,可能原因 发吧。 cdp 主控从控电路板出现故障或无此设备。建议措施,一,确保 propa cdp 主控从控电路板已安装。二,更换有故障的电路板。
189工业机器人案例分享









