信捷PLC的PID自整定效果

粉丝2874获赞4258
相关视频
 08:16查看AI文稿AI文稿
08:16查看AI文稿AI文稿心结, p l c p i d 控制 p l c 的接线,如图,二十四伏的供电接到模拟量输入模块儿的二十四伏 模拟量输入通道,我们选用 c 零 ai 零对扩展模块儿进行设置, 模块为 x c 一四 a d 四路模拟量输入模块,我们通道一采用电流模式四到二十毫安,不需要滤波,设置完成之后一定要写入 p 二 c 才可以生效。 确定编写一段程序,这段程序的意思为 id 一百为模拟量输入模块的第一个通道的采样, 然后进行浮点运算,模块分辨率为幺六三八三,采集的数字放在第二中, 假设我的温度为一百,那么一百度,那么我就 呃分辨率运算结果乘以一百,放在 d 八中,就是呃我所要显示的最终温度。 设置 p a d 参数,第六千为我们要设定的目标值,测量值 就是通道一 id 一百参数我使用是 d 四千, 我们要注意的是锻炼区保持是从 d 四千到 d 四零四三四十四个计存器是要被占用掉,不能再使用了。然后 y 零和我们的一个输出动作, 这里的自诊定采样时间可以设置五百,也可以设置一千,随便都可以。 然后 p a d 运算范围,这个也可以设大一点,小一点都可以控制死区 设置一个十或者十五,那我们采用临界正当法,他还有个借阅 响应法,我们只需要连接震荡法,然后是 p a d 控制我们动作方式有震动作为逆动作,如果我们是加热控制的话,那我们使用逆动作,因为温度越高的时候, 他的一个输出啊,反而是相反的,有震动作,一般是用在制冷行业。 模式呢,我们一般使用普通模式和高级模式,普通模式就是我这里继电器输出时候就选用普通模式即可,如果是模拟量模块输出,那我们选用高级模式, 这里就是一个模拟量输出值最大四零九五。我这里采用普通模式 模拟量这个 p i d 参数设置完之后,一样的也要写入 p l c 才会生效。 我们来看一下这个参数设置,从 d 四千一直到 d 四零四三,他们分别代表什么意思,可以从手册上面可以查得到,这些都是被占用的,不可以再重复使用。 这里我们来看 d 四零二点七就为治诊定, d 四零二点八为常规诊定。 我首先是字诊定,采用的是 d 四千这一组参数,然后到常 常规诊定的时候,批次将第四千参数传送到第五千里边,那么就到了常规诊定。 接下来我们来进行程序的一个演示, 现在我们可以看到我的模拟量采集模块 id 一百,第一个通道它全部是零,因为我这里要打开信号发生器, 我采用的是四到二十毫安 啊,我可以看到目前的数值是八二十八,对应的温度的话 就是五十点三四度,第六千是我们的目标值,那么我们来对这个数值目标进行设置,那最大是幺六三八三,那么我们设置一半,大概是八十 三点八三。 好,我们来启用智诊定, 此时我们可以看到继电器歪里 零已经熄合了,我们来看 p l c 的状态,确实已经熄合了 啊,当我旋动的旋钮加大电流的时候,那么 y 零就已经变成 off 了。 好,我们来再启用常规诊定 啊,此时转移到了常规诊定, 我来目前它的值是八四五六,采集值大于我的设定值五二零,动作是 off, 我现在来把电流调小一点, 当这两个值接近的时候,这个 y 零的动作他就会无限的来接近他。 此时我们看 p l、 c 上面的 y 零, 这是我们可以看到接电器它会来回的交替进行输出来无限接近这个数值, 这样我们就完成了一个 p i d 的一个控制。
83英孜 07:14查看AI文稿AI文稿
07:14查看AI文稿AI文稿今天我们接着上一期 pid 方案继续讲方案二,这个利用 pic 本体单条 pid 只能实现温控的一个效果。首先我们在这里面 找到 pid 配置,然后这个 pid 指呢,它是一个十六位出发方式是常开或者常闭啊,我们可以写程序试一下,因为要区分方案,所以说我这里做了一个 str 切换, 然后出发方式我们应用常开, 再见到纸巾配饰, 只能配置里面有个目标值,这个可以定义为 hd 一百测定值。这里因为我们是第一个文控模块的 c h 一通道 接的热电偶采集,所以说是 id 一万。然后参数就是我们这个控制参数的手机值,可以取名 hd 三百。这个 hd 三百 作为手机纸计算器,他就占用六十九个,所以说我们切记不要在其他地方重复使用。嗯,为什么占用六十九个呢? 我们资料上有个对照表,可以简单看一下 ht 三百,他在 s 三就是一个我们的手机纸 进到这程序上面这个参数的啊, s 三加二就是 h d 三百加二就是 h d 三百零二,其中第零位到第六位是不可用, 第七位表示手动还是自动 pid, 我们可以写成 hd 三百零二点七,这个 batt 位可以导通开启这个 自诊定位, hd 三百零二点八就是自诊定成功的一个标志, 将自整定的数据稳定在我们设定的目标值,他会自动进入手上 pig 的功能, 这个备射期会自动切换为手动 pid, 相当于开启了手动 pid 功能。这个我们接下来的案例会 讲 pid 资整定,因此你看我们触摸屏啊,我现在是在线连接的,我没有设定 pid 比例积分微分,他是通过资整定把这数据读取上来。好,这里我们输出, 因为是经济管的 y 端子,所以说这里输出通道第一个模块是 y 一万输出上线设定值啊,四零九五,我们也可以在高级模式下修改。然后我们看到参数设置,这里有手动 pid 或自动 pid, 两者的区别就是 自动 pid 不需要设定比例争议积分时间,未分时间。好,接下来我们看这个 pid 运算范围,运算范围就是加热开始处于 pid 全开,以最快速度 接近我们目标温度,达到运算范围的时候,开启 pid 控制。比如说我们这里设定五百 就是五十度,当然这个病就换算关系,关系根据自己的支电偶读取来换算,比如我这里是五百就是五十度,运算范围就是五十到一,这就是他的实际运算范围。 嗯,为什么我设这么大呢?就是主要是方便监控温控曲线,因为我运商范围设的太小,在没开启 pid 的时候, 这个运算范围的时候,他就以最快时速从目标温度开始爬升,这个 是不利于我们细致的观察这个曲线变化的纹身太快。然后这里有个 pid 控制 死区,死区就是防止不停的调节输出纸,磨损我们相关的元器件,我们这里是固态继电器,所以说我默认您还有一个制整定周期变化纸,这默认十啊。制整定的一个方法, 方法太分节约响应法和临界震荡法。节约响应法就是需要保证我被控的对象的当前温度与环境温度一致,才能够开启自诊厅。那么临界震荡法就是 被控对象的当前温度不一定与环境温度一致,也就是从任何温度就可以开始织枕垫,然后还有个织枕垫。 pad 控制模式, 正业当中是选择 pid 控制,正业当中是选择 pid 控制方向设置。我们这里有个力动作和正动作,那力动作呢?就是随着测定值 pv 的增加, 操作输出指纹 mv 反而减少的动作。一动作一般用于加热控制,通俗点讲就是 我们温度低了就动作,温度高了就不动作。所以说我们这里选择力动作,正动作就是随着测定值 pv 的增加,输出指 mv 随之增加的动作。真动作一般用于冷却控制, 通俗点说就是温度高了我就动作,温度低了就不动作。我自整间周期变化,只是这里默认十。 然后这一系列设定好以后,我们点击写出 p 二 c, 写出后就是这么一条纸巾,在线监控一下他的一个变化,加热开启目标温度。比如说我设个六十度 当下温度,因为现在是晚上 好二十点九度,我们先打开它,然后监控下来一个曲线变化,然后超过的时候他就把这个通道自动关闭, 现在处于 pid 整形状态。好,现在就是在慢慢去一个治整形范围, 现在又自动把它开始不断的打开和关闭这个通道,观察这个变化, 那数据我们已经出来了,比例积分微分这三个字说明整定成功啊,一直在维持 接近我们的一个目标温度六十度之间,因为我们这个热天鹅有延迟啊,啊?找到一个是以前拆机建下来的,可能实际已经读到目标温度六十度的时候, 但是我们这里前后的这个数据啊有滞后 啊,这就是我们想要的一个效果,比例积分微分自动整形出来。
 13:43查看AI文稿AI文稿
13:43查看AI文稿AI文稿大家好,本节课讲解的内容是 xd 的 pid 指令配置参数介绍及其应用。 xd 的 pid 指令呢,是在 xd 的基本指令片手册里可以看到, 手册是在官网的下载中心,下载网址是三 w 点细节点 com, 细节是 x i n j e。 在服务与支持界面,点击里面的下载中心, 进入下载 中心之后内别筛选,选择产品手册飘 c 就能看到我们需要的 x、 d、 xl 系列漂星护手册基本指令片,或者是输入关键词搜索基本指定也能看到,因为时间问题,我们已经提前下载到了桌面上,打开给大家看一下。 手册的第七章讲到了 pid 控制, 先简单的看一下 七杠,一是代数,代数女讲解了 pid 的功能, 他又分为逆动作还是正动作,若是软件你选择逆动作,则是常规的加热控制,若是正动作则是冷却控制。好方法有两种,分为积月响应法和临界正当法, 这是自认定的两种方法。对于温度控制对象来说,使用节约响应法需要保证被控对象的当前温度与环境温度一致,才能开始自忍定。 若是自然界选择临界震动法,则当前被控对象的温度不一定要与环境温度一致, 然后。所以说建议大家使用临界震荡法,该方法用的比较多,自诊定,他会诊定出一种 kptitd, 该参数就是整定出来的参数,可以用于手动 pid 进行进一步的控制,让他稳定在你的设定的目标值。 可以看一下我们 pid 的指令,他是一个十六位的指令,条件是用长开长臂一直倒动,他第一个操作数是他的目标纸,第二个操作数是他的测定的数值,第三个操作数是控制参数的手地纸, 最后一个是预算结果,可以用计算器默认的,只是零到四零九五,是他的模拟量输出,也可以用外端子晶体管输出的外端子来开关量导通输出。 第三个操作数是他的控制参数的首地址,一旦写了该寄存期之后,该寄存期到寄存期加六十九,这个地址都会被指令占用。所以说若是使用了该 pid 指令 这些范围的寄存器,就不要再另做他用。上面讲了对预算结果数据寄存器用于存放 pid 输出值,这是模拟量输出,是输出值在 继电器里面存放。如果你是记输出,是用晶体管的外端子输出,但输出开关量来控制相应的固态机电器之类的导通通断进行 pid 的控制,这个外端子必须得用晶体管类型的 y 才可以当输出 出端子,这是 pid 的控制规律,大家可以看一下。上面提到了,若是开关量输出的话,他的 pid 默认上限值为四零九五,是零到四零九五,这个值可以在 指定配置里面高级模式进行修改的。现在看一下他的参数设置,这是手动 pid 的截图,下方是自然定 pid 的截图,可以看到 手动 pid 的时候输入需要输入彩样、时间、比例、积分、微分这些参数, 而自忍定则不需要输入这个比例增以积分微分时间这个是需要这个,这种数据是需要自忍定整出来的数据,然后再给 到手动 pid 进行控制的,所以自诊定的目的就是整定出这些数据, 可以看一下下方的寄存器定义表,这个 s 三指的是指令的第三个操作数,上面标号为 s 三是他的控制参数的首地址, 这写的是 h d 零,表格在 s 三就表示 h d 零,后面写的他的备注含义功能,然后这个就是 s d 零加二就就是 h d 零加二是 h d 二,然后各个位的作用, 他的第零位,第一位到第六位不可用,第七位表示是手动还是 pid。 控制零则是手动 pid 一 一是字的零, pid 可以写成 h d 零加二就 h d 二,这个计算器 h d 二点七就表示这个贝特七,这个位 可以导通他开启自认定 b 八就 hd, 二点八就是自认定成功标志。我们一般自认定之后,他整定出一组数据,稳定在你的 设定的摸标值,他会自动进入手动 pid 的功能,他 的那个 b 的七会自动切换,由原先你上次演出发赛的他倒通之后,他只准定结束成功标志为 o 的时候,他同时会把 b 的七由 o 变成 of, 自动切完 手动 pid, 这个时候一直倒通 pid 指令,也相当于就开启了手动 pid 的控制这个过程,这是不需要你手动操作的,若是你需要重复的进行 pid 自忍定 自诊定的话,是需要你断开 pid 的前面的导通条件,让他重新的进行自诊定好,这是需要注意的一点, 这个就是我们自认定出来的数据,他占用的地址 可以看一下,这些是他的高级模式下可以设置他的输出上限,下限 是四零九五 后方标注的,若是标注系统内部使用参数,仅供监测。有这个参数的话,只可以只读,不能对他进行修改的, 大家有兴趣可以看一下, 现在跟大家讲一下他的参数的说明。 他的正动作表示一般用于冷却,控制他的车定值的增加,操作输出值随时增加力动作是加热 测定值增加,操作输出值反而减少。 讲了他的占用的 寄存器范围,普通模式和高级模式。这个也可以右击 pid 指令对他进行配置,或者找到相应的寄存器对他进行修改也可以。 采样时间,采样时间是指系统按照一定的时间间隔对当前值进行采样,并输出值比较,这个时间间隔即为采样时间。 采用时间的设置建议大家实际情况而定。若是你是用的温度控制,则建议你按照以下情况来进行设置。若是你是温度控制情况下, 外端子经济管,外端子输出控制外接的是固态继电器,则采用时间设置为一到 两秒,两秒左右。若是你是普通的继电器输出,则建议你是五秒以上。 若是接的阀门用阀门的开度来控制他,则建议采用时间设置为十秒以上,然后配合控制死去使用。这采样时间是很重要的,需要按照实际的情况进行设置。 接下来是 pid 的运算范围,运算范围是指的是一开始进行 pid, 他是全输出, 以最快的速度接近目标者。当达到你的运算范围这个过程中,他开始进行 pid 的控制,控制他的运动。举个例子,若是你目标只设为一百, pid 的运算范围取之为十,那他的 pid 的运算范围就是九十到一百一这个范围。控制死区 他的设置也是比较重要的,若是你输出不停的调节,那有关器械原件会磨损的很快。若是设置到死区,可以避免这种情况。 比如说你设置的死区为十, pig 输出当前值一百二十二,对于上一个值一百二十指变化量值为二,二是 在十的范围以内,那他将你的一百二十二的变化这个结果一百二十二,结果保持在内部寄存器 输出值还是保存在你的上一次输出值一百二十的输出值的状态,这样就不会让相关的机械原件磨损的严重。 若是大于控制死区值,则 pid 实际输出值按照当前的输出值来控制。 接下来给大家看一下自诊定模式,自诊定模式适用的控制对象是温度及压力,不适用的控制对象是业位及流量。 自诊定就是提取 pid 参数的过程,有时自诊定用一次并不能找到最佳参数,需要进行多次自诊定才可以, 找到最佳参数之后可以嗯,进行设置,他会自动进行手动 pid 的控制,是手动 pid 的控制不太理想,可以自己调节 pid 的这三个参数 啊。上面讲到了我刚刚之前提到的机遇响应法,这是自然定其中的方法,其中的一种机遇响应法要保证 被控对象的温度与环境温度一致,然后临界震荡法则是没有这个要求,而且我们建议是使用临界震荡法,因为这种方法用的比较多。 上面列举了这两种方法的图, 这几种参数呢,一般用户是不需要自己进行修改的,若是嗯,对 pid 很感兴趣,想要进一步的更深一步的了解,也可以看一下这几个参数。 高级模式,高级模式里面可以另外再设置这几个参数,输入绿波常数、微分增益,输出上下限设定值。这些前面的两个参数可以用默认纸就可以,或者是自己比较 懂这些积分微风自己也可以进行设置输出上线下线设定值,这个在最高级模式里进行修改的默认 是零和四零九五。下面是控制系统的一些经验值,但建议大家还是用自整定,自整定出数据之后变成手动整定,然后进行控制。
33工业自动化 04:40查看AI文稿AI文稿
04:40查看AI文稿AI文稿大家好,今天我继续给大家讲解数学仪表的应用,那么之前呢,多个视频呢,给大家讲解了如何通过位置控制来实现我们的温度控制,当然了你也可以实现压力控制,液位控制等等。他们的设置过程是这样的, 那么如果你需要精确控温呢?位置控制就无法满足要求, 这时候我们就需要引入仪表的另外一种控制方式,叫什么 pit 控制,也就是我们的比例、积分、微分, 他的控制原理图我给大家画在这里,比如说刚开始后,他的波动范围比较大,慢慢慢慢的他的调整到位 之后,我们的实际值跟你的设定值是一致的,这就是精确控温的一个原理。 p id 参数在我们工业现场调试是最为麻烦的,如果你去手动调节呃,这三个值的话,非常浪费时间, 而且效率不好,效果也不好,那我们怎么办呢?现在的智能仪表呢,都有这么一种功能,叫自整定功能,就是他自己去算比例、积分、微分这三个数值保持我们的,嗯,设定值与给定值是一致的。 那么我们怎么实现仪表的自诊病功能呢?今天我给大 大家讲解一下,我这里画了一个就 dkc 的一边,他猪肉类型支持 k 型零到四百度, 那他的输出呢?是这里接了一个固态继电器输出,同样带两种报警输入,也是万能输入。好,我们看一下他的参数设置,非常的简单, 比如说我们现在是零一百度, 改成一字顿啊, 怎么启动这个自整定功能呢?就是他有一个内部有个 at 参数,我们按进去同样跟锂电的仪表一样,嗯,超过两秒钟啊, 第一个差数,具体差数的含义大家可以参考说明书啊。往下按,对按这个 软拔,这个 at 的功能就是自转定功能,你马上改成一,他就仪表就根据你实际温度进行整定, 你给他改成一,然后按住这个下推键退出来, 是不是这个灯, at 的灯自整定功能呢?就在闪烁这个时候呢,我们需要给他一个信号, 给他模拟一个什么信号呢?他要在他的设定值正负百分之十这个范围内进行调整,你要给他这一段区间,他会自动计算 p id 这三个参数, 我的温度是每秒升高一度,我就给他用信号发动机模拟的这么一功能。给大家看一下 at 整令的过程 好了,他在走这样三个流程,从九十到一百一三个流程,然后完毕之后呢,他就自动停止这个整定功能,就差数已经算好了,算好了他就能正常工作。 大家看运行过程中这个输出灯也是一直在动作的,这个动作就代表我们的固态机在进输出。 好,现在看大家看这 at 灯已经关掉了,对吧?带我们的代表我们的自转变功能结束,那么我给他比如说收回一百度, 大家看一下这个这个灯的状态,那灯闪一下是吧?加热一下就断开, 他在一百范围内,这个灯就会,嗯, 亮一下,断一下,亮一下断一下是吧?好了,先给大家介绍到这里,感谢大家的观看。
155仪控白哥精品工控课 05:22查看AI文稿AI文稿
05:22查看AI文稿AI文稿度模块测量温度的单位是零点一摄氏度,将这个测量温度的这计算器得到的温度值传送给地十,这地十就是我 pid 指令里的测量值,就测量的温度值,地零是目标值, hd 零就是我的相关参数的 其实地址,外衣是我的开挂量输出的晶体管端子来控制我的固带继电器让它加温之类的。 好,这个是 h d 二点七是这个操作数,加二,然后胃七,他的意思就表示这个让他治胃就是开始自诊定 啊。这个模块我这边也添加进去了,现在进行连击 连上以后,我程序刚刚之前已经下载过,所以说不需要再重复下载, 然后进行自由监控,看到这个操作,这个其实地址,然后地址加三四五,就是我们需要得到的它的 k, p t i t d 三个控制的参数。 自认定得到这是三个参数,并且然后这条指令我是想让他自认定结束之后,二点八为 on, 表示自认定成功,这时候它二点七会默认的由 on 变成 off, 由自整定切换到手动整定,然后这参数也在,就是由自整定,自动切换 换成手动诊定。这个这过程中这个 p i d 前面的指令条件是一直是导通的,所以说这个过程不需要我们手动操作,若是你需要,嗯,重复进行就是再次进行一次诊定,或者是手动自诊定, 手动 p i d 再次切换到智能定的话,这个条件是需要断开再重新导通的。好,接下来我打开我们迅捷触摸屏的在线模拟功能 大灯,监控触摸屏和 p l c 通讯,触摸屏上显示的 p l c 的数据 就是这个横纵标表示时间,纵坐标表示我的温度,实际坐标就没有显示了,大家只要知道看到这个温度的变化的曲线, 最后稳定在我的目标值就可以。这边是我添加的监控对象,这是测量值当前的测量值,然后这是目标值,我还没有给值,现在我开始给他给值, 无标值设为六十摄氏度,单位是零点一摄氏度,所以说设为六百,然后开启自认定,现在二点七有圆形的 of 变成 on 哈开始分,现在就是自认定状态,并且导通了 p i d 指令, 看到 y 一开关量输出,现在是输出控制它加热, 然后这边三四五是我们需要的,相对于这个是 h d 零,然后地址依次加三四五是我们需要的 k, b, titd 这三个 pid 参数。二点八是那自认定成功标志,它成功之后会变成 on, 同时这个二点七由 on 会变成 off, 由自稳定与切换成手动的镇定, 这边就能显示了,这红色的这个线表示我的目标值,就是六十摄氏度,绿色的线表示我的测量值。好,现在就是需要时间等待它进行自稳定,然后自动切换成手动 p i, d 能看到现在 y, e, v off 的状态,他就是知道当前测量值高于目标值,所以说他开始不做升温,开始降温,最后 后他会逐渐的调整稳定在的自己的目标值。 好,现在能看到它的 p, i, d 的三个参数已经出来了。二点八 成功标志置为了 on 自稳定,成功标志为 on 沉定整定成功,然后二点七由 on 编制 off 自稳定切入到了手动稳定,然后现在一直导通,现在是进入了手动 p i d 的控制, 理想情况下的话就是最后的值就是稳定在的目标值。若是你感觉过程中需嗯曲线等轨迹不符合自己的要求,或者想进一步改进的话, 可以调整 hip t i t d 这三个参数,具体的调整的方式则是参考百度上有很多相关的文档,可以自己了解一下,这里就不多做赘述。 好,本节课就讲到这里,谢谢大家。
18宁波鸿信自动化 13:17查看AI文稿AI文稿
13:17查看AI文稿AI文稿p 这个模块,本节课讲的就是该模块的 p i d 的控制, 这是扩展模块的图,上面讲了扩展模块的特点及规格,它是 p t 一百薄热电阻输入,这个是六通道的输入,然后可以支持 p i d 的控制。 讲解了上面叉 d 三及以上可以扩扩展模块,叉 d 一,叉 d 二是不可以扩的,这是模块的规格,可以测量的温度,范围,控制精度,分辨率等等, 然后有端子的分布。这里需要跟大家说明一点,这个外泥若是用作 pid 的输出控制, 这外铃是固定的,对应的零通道,它的输出点一通道的输出点是对应的外一,二通道是外二,三是外三, 四通道是 y 四,五通道是 y 五,这个点是固定好的通道。功能选择的是使能输出,那就是 pid 的控制,这个端子是作为 pid 输出的,若是你不用 pid 的话,这个端子是用不到的。 若是你的模块需要当普通的端子玩端子输出,那需要将玩通道功能改为立即输出, 这个是对模块的版本有要求的,并不是所有的模块都可以支持立即输出,当一个普通的歪端子输出,相反讲到了模块要求的 版本,而功能选择及仅固件版本 v 幺零零及以上版本的模块支持, 然后在这里配置模块的时候,就可以选择它的六个通道的滤波系数以及它的外端子的功能,是通道是能还是立即输出, 现在给大家从头到尾简单的看一下。上面讲了我们的端子的定义,零通道就是 c 和 a, a 就是接的热电阻输入端, c 是公共端,依次类推六个通道, 然后就是相应的 y 段子和公共端,然后我快需要二十四伏接电源,然后 是十四杠三,这个是输入输出定义号分配。上面显示的 c h 零到 c h 五,总共六个通道,它对应的计算器地址等。 通道显示温度值,这个是显示温度的寄存器, 若是挂在 plc 右边的第一个模块,就是该温度模块,那零通道的显示温度的计存器就是 id 一万,若是挂在 plc 右边的第二个,那就一万零一百,然后依次列举出来。 这个扩展模模块可以挂十六个,是要求擦地的 plc 的,是擦地五及以上才可以擦地三的 plc 右边最多挂十个模块, 没讲了,这个是对应的呃,不同位置的模块,然后零到五六个通道的地址 p i d 输出, 这个是热电组连接状态, p i d 自转定错误位,只能通道信号为零为关闭,唯一是开启 p i d 的控制。 上面也详细讲解了,若是你的模块版本是 v 幺零零,支持选择外功能,选择立即输出,就可以当普通的段子晚点输出。 这个 y 一万到一万零五就控制的 y 零到 y 五这五个端子。这六个端子若是选择通道使能,则适用于 p i d 的开挂量输出。 这是自认定 p i d 控制位,大家可以详细了解一下参数,方便自己进行理解。 然后这个是 p i d 参数值,我们自整定的目的就是整定出 p i d 这三个参数,然后进行手动 p i d 控制,让它稳定在我们需要的目标值 运算范围。这些是有默认值的,下方的表格会有提到,我们先看这边温度偏差值和这个校准,环境温度值是指的是当你的环境温度和你实际测到的温度不一 制时,可以对它进行校准,这个温度偏差值和黄金温度只只要改其中一个就可以了,一般直接输入校准黄金温度值即可,就直接输入你当前正确的温度值, 他会自己算成,算出这个温度偏差值,内部进行计算。这个是我们 pid 设置的温度值, 单位都是零点一摄氏度。 好,可以看一下他怎么配置呢?是在软件里有一个扩展模块设置,然后选择相应的型号,然后配置他的参数等,然后第一个模块就选第一个,如果挂了多个模块,要按模块的 顺序依次选择相应的模块进行配置,写入 p l c。 上面讲解了滤波系数什么情况下最弱,什么时候不滤波的好,这边是刚刚已经跟大家讲过了的,它的外功能选择的含义, 这相关的滤波系数的计存器,你只要在这里配置好就可以了,不需要特地在计存器里进行修改。 好我们温度模块。呃,参数的修改等是需要用 from 读取和 two 指令斜指令来进行控制的,这两个指令是在 我们设计功能块里面可以选到,然后选择相应的功能读还是写,然后模块号是多少? 好,相应的地址个数 p l c 地址模块号,一般 p l c 右边的第一个那就是 k 一万,第二个模块就是 k 一万零一, 就看你这个温度模块是 p l c 的第几个位置,上面写到了模块地址,看到 这个复处指令,写入模块指令给大家看一下哈。第一个操作术是模模块号,刚跟大家讲过了, s 二是模块的 守地址, s 三是个数连续的个数,最后一个是 p l c 的计算器守地址读取模块指令也是一样的, 上面写到 from two 指令只能在顺序功能块里面,若是 p l c 的固件版本在三点四点五以下,那么最多可以写八个顺序功能块。 若是固件版本是在三点四点五级以上的话,那程序里可以写多个,可以写到一百个,但是最多只能运行八个,那这是模块的编号,其实编号 第一个模块就是一万,最后一个是一万零十五看,若是版本比较低的话, 在三点三级以下的版本软件中,则模块号是 k 零到 k 十五。不要写错,这个是我们的模块,该模块它的内部地址, 这是自然定时呢,都是 k 零。这个在我们随视频的一个手册文档里详细讲解了, 对它进行操作的时候,个数只要写一个,它具体使用到哪几个通道就看最后一个 p l c 的那个 继电器,他总共占了六六个继电器,你给你控制几个继电器,他就控制各个对应的通道,他的自动定时呢?然后 pid 的输出值定制了,然后设定 这些是参数,大家可以仔细看一下。然后上面也讲了这个 from two 数据初始化,这个数据初始化是有版本模块的版本要求的,这个是将这个模块的数据恢复默认的初始化状态, 默认的参数,他要求模块的固件版本是 v 幺零零及以上,然后对应的这个地址 k 六十一写一, 那就是给大家恢复初始需要注意点的是这服装处指令必须得是边缘出发才可以, 若是常开一直导通的话,他可能会将模块内部地址给写乱,所以说用到了芙蓉指令和兔指令来操作模块或读取模块参数的时候,需要用边缘 信号来进行触发,不要用常开。再次说明一下,然后这下面讲到了外部连接,是 p t 一百薄热电阻做三限制的话,颜色一致的放在 c 零端,另另一种颜色的放在 a 上。 这上面讲到了输出电路相关参数,大家可以看一下,这个是 p t 的输入曲线图, 他对应的数字量和对应的测量温度,这个看可以看到是十倍的关系,数字量和实际温度, 这比较好算。这下面最后一个十四杠七讲到了我们的编程举例,我们待会讲的程序也是很 跟这个手册上立举的程序是差不多一样的, 这个第一个好理解是打开 pid 式能位一直导通它就可以了。然后第二个是设定目标值,就是目五传送,将 hd 零的值传送到定零哦 h d e 传送到 d 十,然后 d 零和 d 十用兔指令将 d 零和 d 十的值给到模块的 k 七和 k 三十七, 可以看到这刚刚的那个地址里讲到了这 k 七是他的目标值,目标温度, k 三十七是他的空问周期。 这个接下来的是可以看到这些指令都是便于触发的,用 floor to 指令的话,都得 是边缘出发才可以,这是写入字诊定启动标志,然后导通 m 十,将 m 十的状态给到了 k 零上, k 零就是字诊定, 然后这里是服用指令来读取它的相关是不是呃相关的自诊定位,然后 p i d 输出值等参数,然后它自诊定结束后,它的自诊定位会变成 off 的状态,由 on 变成 off, 这个时候会导通 t m r 定时器指令零点五秒后自动将这些参数前面的条件给断开。 自整定的过程中,他会将你的 p i d 等参数给整定出来, 若是觉得 p i d 的参数还是需要调整,你可以手动调整。这下方 m 二十后方导通的后面的程序都是讲的手动 p i d 的控制,可以设置相关的 p i d 的参数运算范围等, 然后对它进行写入,写入到模块里。嗯,开启手动 p i d 的控制。 若是需要再次自认定的话,是需要从再次导通相应的自认定位才开始自认定的。好,这边参数。
12宁波鸿信自动化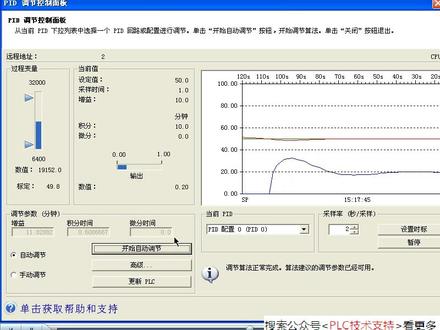 03:49查看AI文稿AI文稿
03:49查看AI文稿AI文稿要想使用 pid 自诊定功能,首先必须使用 pid 向导进行编程,将程序下载并使 cpu 处于运行模式。 然后在 micro 问 v 四点零与 cpu 在线连接的情况下,在菜单栏中选择工具中的 pid 调节控制面板,打开工具, 设置 pid 回路参数。首先选择要调节的 pid 回路号,这里我们选择 pid 零。 先选择手动调节输入 pid 参数,例如增益改为五点零,单击更新。 plc 是新参数值起作用。 监视趋势图,根据调节状况改变 pid 参数,直至调节稳定。也就是过程值与设定值接近,并且输出没有不规律的变化,并最好处于控制范围中心附近。 此时可将手动调节改为自动调节,也就是自诊定。 单击高级按钮,进入高级 pid 自动调节参数选项,这里我们不做修改。 单机开始自动调节按钮,启动 pid 自诊定功能, 此时按钮变为停止自动调节。此时只需耐心等待系统完成自诊定后,会自动计算出 pid 参数并显示出来。 请注意,要使用自诊定功能,必须保证 pid 回路处于自动模式。开始自诊定后给定值不能再改变。 当按钮再次变为开始自动调节时,表示系统已经完成了 pid 资诊定。如果要将 pid 次整定的参数应用到当前漂 c, 只需要点击更新漂 c 按钮就可以了。 在数据块的 pid 数据页可以看到 pid 参数已更新为整定参数。 完成 pid 调节后,最好下载一次整个项目包括数据 块,使新的参数保存到 cpu 的一方皮入伍当中。 以上我们介绍了 pid 自诊定与调节控制面板的使用方法,更多详细内容请参考以下网址。
29三十七度书生 04:44查看AI文稿AI文稿
04:44查看AI文稿AI文稿那我们下午继续,我们早上讲了那个关于 模拟量和数字量,以及那个线性和线性,然后关键就是我们这个 p i d 相关知识的知识点,然后我们这个下午先分享一些案例, 塑料提速机的话,那个应用比较场景比较简单,然后是用我们这个老的 p i d。 算法,那么主要分享这个真空干燥炉的项目分享,然后使用的是我们信杰新推出来的一个军运化算法,应用于锂电场景,锂电池烘烤的, 就之前讲到的它的工艺难点是处于时间之前用老的 pled 算法的话,会达到一种 八路 p i d, 或者说二十八路 p i d, 它都是随意上升的八路 p i d, 各管各的,它都不用管其他人的,但是由于我们这个场景要求它就是要一起加热和升级的,是升温过程中 几个通道之间差距也不能太大,温差不能太大,然后在升温过程中全程接入达达到的一种到最后分布均匀,加热均匀的一种效果化。 这实验数据是直接跑出来的,像此前的话,直接跑出来的效果可以看到这个效果是很差的。 好,给你们 我之前跑出来那个 p i d。 效果温最最高温差和最高最低温差有十二度, 用金银花刨出来的效果就可以明显看到最高温度和最低温度只有二点九度的温差 就拉大了,这是一种场景演示图, 而且可以看到这个波动是极小的, 就是各温各通道的温度及时可以看到它的波动, 每个通道的波动这边有标明,这主要是标了一个标准线,下面是有标明波动, 零点零点三、零点五,在后续的话这是一些分析图,就要讲这个 p i d 算法的分享,那好,相关的数据的话这边也是有的。 ok, 那就给大家观看一下,那之前说过他这个工业难点,还有一个温度波动的在正负零点三,也就是零点六,那我根据我们这个新算法跑出来的效果是可以达到这个要求的,达到零点四、零点二、 零点二度、零点三度、零点四度, 这次的原数原数据很多的,我们就要看最后总结出来的, 你看大家还有什么早上对 p i d 或者说模拟量温度哪里有疑问才提出一些问题, 然后我们看一看那个新上法,嗯, 然后稍等一下,我看看。 然后我们目前这个新算法是已经在那个叉 d、 叉 r 五 e 系列已经投已经投产了,然后续的话就会开发,就会开放到我们那个 crisis 平台以及那个叉 s c d 的平台。 然后这个上位机这个月是能投产, plc 固件已经是已经已经有了,目前新出产的那些都是属于是的。然后其他系列的话后续才会慢慢去计划,反正目前是只有叉 d 和叉 r 五 e 以太晚机型是有的。好的。
 05:20查看AI文稿AI文稿
05:20查看AI文稿AI文稿他的目标值和控温周期,将这个给定值写入到模块里面,这边是导通,他进行自诊定,这边是读取他的那个自诊定的状态, 然后能读取到相关的 p, i, d 等参数,还有它的运算范围。等参数 自软定成功之后,它这个标志读到的标志 m 一百会由 on 变成 off, 就自软定结束。它 进行定时,零点五秒之后复位 m 时,将前面的条件断开,可以进入手动 p id 的控制, 这边也可以自己进行相关的 pid 的参数的修改,这相当于这一块就是他的手动 pid 的地方,你可以进行修改。 嗯,不修改也是可以,用它整定的数值也可以,只要能达到你要的效果。若是想要重新开启自认定的话,需要将它条件重新的再次进行导通,然后开启自认定。好,我现现我们现在先进行连击, 这个程序我们刚刚已经下载过了,所以说再次这里就不再次进行重复操作。 模块给大家看一下配置的模块型号,绿波参数是默认的,不绿波选择通道时呢,适用于它的 pid 的控制,有模块正常通讯之后,下方扩展模块信息,能读到当前模块的信息 进行运行,到头 好刀筒开启自认定, 这个 front 指令,这边能读到 k 十三到十六。它的 p i, d 运算范围的参数跟手册上是一样的,一开始是默认的参数,除非您后来进行了整定或修改,这个参数是掉电保持的。 我们也开启触摸屏的在线模拟的功能,可以看到和 p l c 通讯的参数来监控 p l c 的温度。 好,这是目标值,就我们设置的 h d 零 d 零,这测量值是我用的是该模块的第一个通道,就零通道,所以说是 i d 一万是它的通道的测量值, 这绿色的就是我的目标值,红色的在变化的是测量值。现在开启了智能定固态继电器,是导通的,它开始给它加热,然后最后稳定在我设定的目标值。 需要注意点的是温度模块,它的 p i d 控制建议用于升温的操作,不能用于 冷却的控制, 看的不太清楚。 整定过程中它会整定出一处数值,你读到的这个相关 p i d 还有预算范围的值会被改变,它整定结束之后至 m 一百 会由 on 变成 off 的状态。就诊定结束,进入手动诊定。 好,这边也能看到他当前智能定位已经自己结束了,变成 off, 也诊定出了我们需要的 p i d 等参数 数。现在就是进入的手动 p i d 的过程,你可以自己进行修改,或者是重新进行自认定,都是可以的。 好,本节课就讲到这里,谢谢大家。
12宁波鸿信自动化 02:27
02:27





