台达a2伺服控制用使能抱闸怎么接线

粉丝4594获赞5969
相关视频
 03:3118台达一级代理商
03:3118台达一级代理商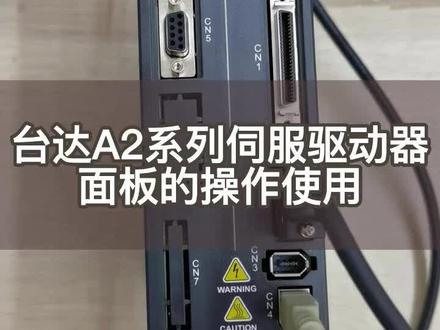 05:17查看AI文稿AI文稿
05:17查看AI文稿AI文稿现在讲一下台达 a、 s、 d 杠 a 二系列四伏驱动器操作面板的使用,新机子拿到的时候上电他会报警,这盖子可以往上划划开, 划开之后可以看到上面有五个按键,上面一个 m、 o、 d、 e, 这个按键是模式切换键,然后中间一个上一个下 是数值的加减键,右边上面的是移位键,右边下面这一个 s、 e、 t 是确认键。 我们先讲一下怎样子取消这个报警,现在报警的话有极限跟急停报警,总共是三个参数,需要修改的参数是 p 二杠幺五,二杠幺六,二杠幺七。 首先按模式按两下显示 p 零,杠零零的时候按移位键 显示 p 二杠零零,往上加加到十五, p 二杠十五按确定, set 按移位移到第二个零,闪烁加到零幺二二按确定, 加到二杠幺六按确定。移位调成零幺二三按确定。然后是二杠幺七加到二杠幺七按确定。移位 往上加,加到零幺二幺按确定。那么这三个参数就改过来了, 都改成百位数,全部都改成一了,然后按确按,按切换键, 切换回来之后,现在我们看到没有在报警,那么就可以了。接下来讲一下寸动 操作的测试,按模式切换键显示 p p 组参数,按移位键显示到 p 四, 加到 p 四,杠零五按确定。现在显示的数值是点动测试用的转数二十转有点低的,如果说要调高一点的话,按一个键移到百位,调成一百二零零幺二零,按确定。 显示 suv 杠 o n 驱动器报错,刚才显示的意思是驱动器没有运行,那么 改一个参数修改 p 二杠幺零改成零零零幺, 确认在现在是否就已经运行了,我们可以听到电机以及有吱吱吱的电流电流声,这个时候再修改 p 四杠零五按确定 还是二十加到一百二按确定现在正常的话就显示 j o g, 这个就是寸动的意思。在现在这个界面按上键跟下键,电机就会正转跟反转, 按下去的时候看一下电机如果正常在转,那么说明蹭动运行就是正常的。当收到货的时候,我们可以通过这个功能来测试电机的动力线和编码器线有没有正常的 好按摩是切换,按上下,现在这个界面切换回来之后,按上下键可以切换目前显示的状态。 f b 杠 p u u, 这是电机的实际运转位置,按向上加加的 c 杠 p u u, 这是上位机发送的指令脉冲数, 再按上加。还有一个常用的参数是 s p e e d 这个这是电机的实际运行转速, 如果有报警的话,他面板上会显示一个报警 代码出来,那像现在这样子。 a l 杠零幺幺,这是编码器故障的意思,因为我们把编码器插头拔掉了。
 01:21查看AI文稿AI文稿
01:21查看AI文稿AI文稿今天给大家介绍 a two 师傅的接线,这里为主电源, ist 为输入电源,单箱机种,我们只要取 rt 两箱控制电 l 一 c 和 lsa b 连下来,我要,特别是福 这边为自动电阻的接线,我们默认是利用内置的电阻将 p 和 d 短接。假如说使用外部自动电阻,我们需要把 pd 短接,可以拿掉将电阻接到 p 端和 c 端。 声音一端为五十片端子啊,里面包含 dido 以及模拟量输入,模拟量输出以及脉冲的信号。声音二为编码器接口, a two 系列是二十 p 的端子, a 三 b 三都是为幺三九四接口。 c 一三为 modelbots 通讯, 带有 i 四八五和 is 二三二 c 音四为 usb 通讯,主要用于阿斯达斯的软件和驱动器相连接。声音五为辅助编码器接口,支持全闭环控制。呃,编码器信号为插分信号。
188小沙沙卖台达 00:37查看AI文稿AI文稿
00:37查看AI文稿AI文稿西门子两百 smart 控制台达 a 二次伏电机控制历程西门子两百 spa plc 采用四八五通讯控制台达 a 二四伏 使能速度设定一千五百,启动电机正转停止, 改变方向,启动电机反转停止。
86农工智控 05:10查看AI文稿AI文稿
05:10查看AI文稿AI文稿大家好啊,今天给大家演示一下这个四伏电机的正点和反点啊,这个程序是怎么编制的啊?就是用两个按钮控制他啊,一个是正转正点正向点动,一个是反向点动啊, 这里的话,这是一个四伏啊,这是一个四伏电机啊,这是一个一百瓦的一个四伏电机啊,这是用的用的胎达壁系列的啊,这是四伏驱动器在这里啊,四伏驱动器, 他这种驱动器的话,还是那种很古老的脉冲压方向的控制方式啊,这是接的线啊这是这是控制线啊,然后接到这个用了一个 fx espl 系啊, 然后在中式街道五二零了啊,方向是街道五二一上去了,然后还有很多的一个什么限位什么东西。 这个暂时不用了,放在这里啊,这个用两个按钮的话来控制这个四伏电机啊,看下,这是一个这是正向点动啊,按着他他就转,松开他就不转了啊。正向点动 这个按钮的话,这个是反向点动啊,反向点动。虽然说现在 这个私服驱动器很多厂家都推出了那种用那个,呃,总线的控制方式啊,用那个一天网总线的控制方式,接线很方便是不是?但是的话,很多客户的话,现在还是为了追求这个性价比啊,为了追求这个便宜吗?为了降低成本, 因为那种比较贵一些啊。呃,用这种古老的脉冲加方向的控制方式的还是挺多的啊,还是挺多的, 都是为了省钱呢,没有办法啊,我这次干了这个小小活的话,就是这种用了这种卖出家方向的控制方式啊,这个这种控这这个点动的话,那个程序是这样的啊,程序是这样的,用的这个,用的这个 drv 二指令啊,然后这个 d 零的话,就是脉冲的那个呃脉冲的那个数量啊,脉冲的数量,然后这个 d 幺零的话,就是 脉冲的那个频率啊,就是他幺零的话,就决定了他那个电机的转速啊,然后脉冲输出口是 y 零啊,然后 y 一的话是方向啊, 当这个地灵啊,他这个里边这个脉冲数量的话是个正数的时候啊,是这里是一个,如果说是一个正一万的时候,他就是嗯正向联动啊,然后如果说他这个 嗯地灵里边这个数量,如果说负数的时候啊,他就是反向啊,反向那个转动啊,也就是说自扶电机的转动的话,是与这个脉冲数量的那个啊正符号有关系的啊, 他是这样这条指令的话是这样来控制他那个运行方向的啊,你看现在如果说我是正向点动的话,他这个里边是低音,里边是显示是一千啊,如果我现在是按这个反向啊反向运行这个按钮的话,大家看一下就变成负的了,看见没有?嗯,就变成负的了啊, 正向啊,这是个正的啊,正的,然后反向就是负的啊,正向是静动的,正向转动的时候,万一这个方向信号是处的处于昂的啊昂的状态啊,反向的时候的话,他是方向信号是 二伏的状态啊,嗯,是这样的,控制的他这个正向反向的话,这个外衣这个信号到底是二还是二伏,是程序自动控制的啊,不需要你去做一些干预啊,这样 这就是效果啊,这是运动控制中最简单的一种控制了啊,有感兴趣的朋友可以私信我啊,大家可以交流一下啊。 至于说这个程序怎么让让他变成在这个正的跟负的之间来回切换的啊?那就是下边有一个小程序啊,艾克林是正常按钮啊, 正常按钮按的时候就是把这个第二十里边这个这个脉冲数量的话,直接复制给这个地灵啊,复制给地灵啊,因为这个地灵是在这个 这个地方吗?脉冲数量就得是地灵吗?是吧?直接复制复制给他地灵啊。如果这个第二十里边是原原来原先就设定好的是那个移动的那个距离啊,就是脉冲数量啊,原原先就设定好那个脉冲数量啊,然后的话 啊,现在是正转啊,正转啊。啊,这里为什么要加了一个延时呢?是因为啊,我要先把这个直付给这个地灵之后,然后延时一段时间延时,让让那个指令动作啊,令指令动作啊,这样会更那个稳妥一些啊。 然后这个 x 一的话是个反转信号啊,反转的时候是用一个减法指令啊,因为用这个零去减去这个原原来这个第二十里边这个值啊,因为这个第二十里边原来这个值的话,他是个正数,用零去减的话就变成一个负数了,然后现在 再给把这个负数再给地灵啊,这样的话这个地灵里边这个值就变成负的了啊,现在他里边变成负的,然后这部电器就会反转的啊。
856青岛鑫伟达电气 00:32查看AI文稿AI文稿
00:32查看AI文稿AI文稿这是台达一三四伏开机显示的 all 幺三,为急停故障,可以通过修改参数把这个功能屏蔽掉,第三位改成一, 然后重启一下就可以了。新四幅调试需要修改一下这个参数, al 幺四和 al 幺五同样去修改,第三位改成一。
415工程师e家(华控技术)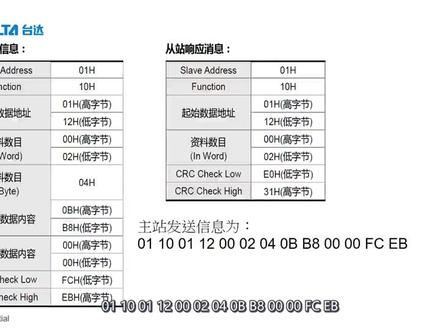 03:54查看AI文稿AI文稿
03:54查看AI文稿AI文稿主要介绍阿斯达 a 兔系列驱动器 madabase 通讯如何修改参数, p 一杠零九。 主要内容包括,一、参数说明二、范例说明三、软件操作一、参数说明 p 一杠零九参数说明如下表所示, p 一杠零九是内部速度参数,通常应用于 modebase 通讯,修改电机转速。 我们需要重点关注其通讯地址和资料大小。批一杠零九通讯地址是零零幺二 h 和零零幺三 h, 资料大小是三十二比特双字。 二、范例说明,阿斯达 a to 系列驱动器支持功能码,零三 h 读取多笔数据, 零六 h 写入单字,幺零 h 写入多字。 p 一杠零九参数资料大小三十二比特双字 无法用零六 h 功能码去写入参数,要使用幺零 h 功能码,此为 modelbox 通讯 rtu 模式,修改双字反。 主站发送信息为零幺幺零零幺幺二零零零二零四零 b b 八零零零零 fc eb。 其中零幺是四伏站号,幺零是功能码,零幺幺二是四伏参数。批一杠零九的起始通讯地址, 零零零二是写入资料字组的长度,零四是写入资料字节长度, 零 b b 八零零零零是写入 p 一杠零九的资料大小。 fc eb 是 crc 教验码,教验码可通过 wpl soft 软体的帮助 lrc 斜杠 crc 产生器进行计算。 主站发送完信息,从站会回应接收信息,表示发送完毕。三、软件操作 打开 pc 创口调试助手给 p 一杠零九写入数据,三零零零 回传信息,如软件琐事。 以上为本期视频所有内容。












猜你喜欢
最新视频
- 8902软件邦