旋转后成分矩阵与预设不一致怎么办
为了对比旋转前后的差异,我们需要把数据显示出来。我们这里规定,无论原始数据是什么格式,显示出来的效果都应该与途中一致, 也就是行优先的二维矩阵格式。换句话说就是四种数据格式显示的结果应该都是图中这样。我们这里统一使用图中的收 table 函数来显示数据。大家可以先自行练习一下如何将四种数据格式显示出来。先说一下第三种数据格式,行优先二维列表的显示。 由于此数据格式与显示格式相同,所以可以使用图中的函数直接二行显示。再说一下第四种数据格式,列优先二维列表的显示。由于此数据格式与显示格式不相同,所以我们需要先将数据转换为显示格式, 然后再显示。而转换的方法就是每一列取一个需要的行元素,然后重新组合成行并显示。

粉丝442获赞2778
相关视频
 07:38查看AI文稿AI文稿
07:38查看AI文稿AI文稿大家好,欢迎来到工程形象,对于旋转矩阵,大家有没有这样的感受?学习的时候感觉不难,但实际使用的时候晕头转向。什么情况下要左成,什么情况下要右成? 什么情况下要转制?本期视频将带大家形象直观的理解旋转矩阵。 第一天,在一片虚无的三维空间,神说要有一个点,于是就有了一个点屁,人类开始思考,上帝开始发笑,如何在三维空间表示这个点呢? 我们建立一个直角坐标系 s, 三个轴分别为, x, s, y, s, z, s, x, s, y, s, z, s。 方向上的单位向量在坐标系 s 中分别表示为, e, s 点 x s, e, s 点 y, s, e, s 点 c, s, 构成一组标准单位向量。以坐标系的原点为起点,指向点 p 所构成的向量 p s 表示点 p 相对于坐标系 s 的位置, 分别使用三个标准单位像量与 ps 进行点击运算,可以得到 ps 在三个坐标轴上的投影, xps, yps, zps。 将三个点击运算写成一个矩阵乘法运算可以看到三个标准单位向量构成一个单位矩阵。在坐标系 s 中, x, p, s, y, p, s, z, p s。 构成一个坐标,表示 p s。 第二天,神说要在坐标系 s 中旋转,点 p 如何表示这次旋转呢?我们先复制一个坐标系 s, 即为坐标系 b, 称 s 为参考坐标系 b 为本体坐标系点 p 相对于 b 固定不动,然后相对于 s, b 随着点 p 一起同步旋转,因此 p 相对于 s 的旋转等价于 b 相对于 s 的旋转。在坐标系 b 中, p b 表示点 p 的位置。使用 p b 在 x b, y, b, z b 上的投影 x p b y p b z p b 构成一个坐标来表示 p b。 在坐标系 s 中, x b y b z b 方向上的单位向量分别表示为 e s 点 x b e s 点 y b e s 点 z b。 该组单位向量相互正交,并且在空间位置上与 s 中的标准单位向量组具备相同的属性。分别使用三个单位向量与 p s 进行点击运算, 可以得到三个投影, x p b y p b z p b。 将三个点击运算写成一个矩阵乘法运算,可以看到三个单位项量构成一个行列式等于一的特殊正交矩阵。 利用正交矩阵的逆等于其转制的性质,得出 p s 等于 r s, b 乘以 p b。 其中 r s b 是一个三乘以三的矩阵,称为坐标系。 b 相对于 s 的旋转矩阵,表示 b 相对于 s 的姿态。 x b y b z b 方向上的单位向量在坐标系 s 中的表示构成矩阵的三列。因此, r s b 是一个行列式等于一的特殊正交矩阵。利用矩阵的逆运算法则和正交矩阵的性质,得出 r b s 等于 r s b 的逆等于 r s b 的转制,即旋转矩阵的转制,表示 逆向的旋转和姿态。第三天神说要在坐标系臂中旋转点屁,为了让点屁相对于臂固定不动,我们先复制一个 b, 即为 b 一撇。 这样我们就可以将 p 相对于 b 的旋转转化为 b 随着 p 一起相对于 b 一撇的同步旋转。 此时 b 一撇相对于 s 的姿态,等于 b 相对于 s 的姿态,然后 b 一撇保持不动。相对于 b 一撇, b 和 p 一起同步旋转, 该旋转产生的旋转矩阵为 rb 一撇, b 由于 s 和 b 一撇都保持不动,所以 b 一撇相对于 s 的姿态保持不变。旋转后点 p 相对于 s 的位置等于 b 一撇相对于 s 的姿态乘以 p 相对于 b 一撇的位置。 其中 p 相对于 b 一撇的位置等于 b 相对于 b 一撇的姿态乘以 p 相对于 b 的位置。综合以上两点,得出 p 相对于 s 的位置等于 b 一撇相对于 s 的姿态乘以 b 相对于 b 一撇的姿态乘以 p 相对于 b 的位置。 使用矩阵乘法的结合率得出 b 相对于 s 的姿态等于 b 一撇相对于 s 的姿态乘以 b 相对于 b 一撇的姿态。这里解释了在本体坐标系中旋转本体坐标系为什么要又乘。 第四天神说要在坐标系 b 中旋转坐标系 s, 我们先复制一个坐标系 b, 即为 b 一撇,此时 b 一撇相对于 s 的姿态等于 b 相对于 s 的姿态。 然后相对于坐标系 bb 一撇随着 s 一起同步旋转,因此 s 相对于 b 的旋转等价于 b 一撇相对于 b 的旋转,该旋转产生的旋转矩阵为 rbb 一撇,并且 b 一撇相对于 s 的姿态保持不变。 旋转后 b 相对于 s 的姿态等于 b 一撇相对于 s 的姿态乘以 b 相对于 b 一撇的姿态。其中 b 相对于 b 一撇的姿态等于 rbb 一撇的转制。这里解释了在本体坐标系中旋转参考坐标系为什么要又成转制。 第五天神说再次在坐标系 s 中旋转点 p, 我们先复制一个坐标系 s, 即为 s 一撇,此时 b 相对于 s 一撇的姿态等于 b 相对于 s 的姿态,然 后相对于坐标系 ss 一撇随着 b 和 p 一起同步旋转,因此 b 和 p 相对于 s 的旋转等价于 s 一撇相对于 s 的旋转, 该旋转产生的旋转矩阵为 r s s 一撇,并且 b 和 p 相对于 s 一撇的姿态和位置保持不变。 旋转后, b 相对于 s 的姿态等于 s 一撇相对于 s 的姿态乘以 b 相对于 s 一撇的姿态。这里解释了在参考坐标系中旋转本体坐标系为什么要做成。 第六天神说,要在坐标系 s 中旋转坐标系 s, 我们先复制一个坐标系 s, 即为 s 一撇,此时 b 相对于 s 一撇的姿态等于 b 相对于 s 的姿态,并且 s 相对于 自身的旋转等价于 s 相对于 s 一撇的旋转,然后 s 一撇保持不动, s 相对于 s 一撇进行旋转,该旋转产生的旋转矩阵为 rs 一撇 s 由于 s 一撇和 b 都保持不动,所以 b 相对于 s 一撇的姿态保持不变。旋转后, b 相对于 s 的姿态等于 s 一撇相对于 s 的姿态乘以 b 相对于 s 一撇的姿态,其中 s 一撇相对于 s 的姿态等于 r s 一撇 s 的转制。 这里解释了在参考坐标系中旋转参考坐标系为什么要左乘转制。 第七天神说 leave me alone 好的,本期视频到这里就结束了,感谢您耐心看完,有什么问题的话,欢迎留言讨论,如果您喜欢这类视频的话,麻烦动动手指点个关注吧,我们下次再见!
161工程形象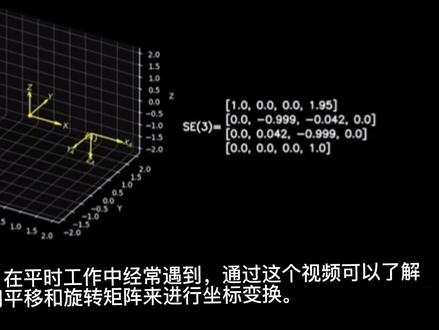 05:25
05:25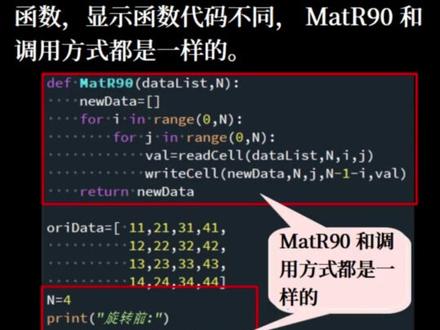 00:58查看AI文稿AI文稿
00:58查看AI文稿AI文稿上次让大家写的旋转函数你写出来了吗?图中是我写的代码,大家可以参考一下,主要思路就是使用两层循环,便利举证中所有的元素,然后按照公式复制元素即可。写代码时要注意元素的存取,使用我们前面写的存取函数,不要对原始数据进行操作。 图中是数据格式为行优先二维列表的所有举证旋转需要的函数。图中是数据为列优先二维列表的所有举证旋转需要的函数。图中是数据格式为行优先一维列表的所有举证旋转需要的函数。 图中是数据格式为列优先一维列表的所有矩阵旋转需要的函数。 从这些代码中可以看出,除了原始数据读取和写入函数显示函数不一样以外,其他函数和调用方法都是一样的。
 05:51查看AI文稿AI文稿
05:51查看AI文稿AI文稿上节讲了矩阵的缩印,这一节讲如何使用缩印进行矩阵元素的修改。矩阵元素的修改、添加和删除说明,通过指定矩阵缩印修改、添加和删除相应元素。 锁引超出矩阵范围元素会报错,但是可以进行复制。删除元素后的矩阵仍然要保持矩形才可以进行删除,否则会报错。备案的时候,对超出矩阵范围的锁引复制需要预分配内存。下面进入 maclab。 首先先加一个三乘三的矩针, f 运行 元素是一二三四五六七八九。 前面讲过,这是缩影矩阵 a 的第二行第二列元素,把它变成十,按复原形,第二行第二列元素这里变成十了,原来是五。 还可以使用线性缩印进行修改。例如把矩阵 a 的第二个元素变成十, f 运行,这是第二个元素变成十。 上节讲过访问 g 战 a 的第三行第四列元素会报错,因为超出它的范围了 f 运行,但是呢,对它进行复直是可以的, f 运行。这个时候呢,矩阵首先会按照锁引的大小扩展出来,那么锁引第三行第四列的元素,他显然会变成三行四列的矩阵。然后再把相应的锁引的位置修改成相应的数值。 其他元素用零进行填充,这里填充的元素根据数据类型的不同,会有不同的填充方法。对于数值矩阵来说,默认的填充方式就是零。这里之所以要填充这两个零呢,是为了保持矩阵仍然是矩形, 否则这里只添加一个十的话,这就算不上一个矩阵了。 看一下这个语句,这个是一个组合,缩音,第三到四行,四到五列,这样是四个缩音,把它修改成这样的矩阵,这个矩阵也要有对应的维度,是二行二列的四个元素。 f 运行, 可以看到,这里呢?有了第四行以及第五列,那么矩阵 a 呢?首先变换成四行五列的矩阵,然后把对应的三到四行、四到五列这四个元素变换成给定的矩阵,是一、二、三, 上面是矩阵的修改,下面将矩阵的删除, 这是组合所引,任一行第二列变成为空,那么就是把第二列的元素全部删除。 f 运行, 上面 g、 j、 a 呢是五列的,这里删除了第二列,这里呢是一、三一、三,第二列删除掉了, 复制 v、 q 呢,就相当于删除它的相 的元素。那么可以删除单个元素吗?例如把矩阵 a 的第一行、第二列的元素删除掉, f 运行,可以看到他会报错,他说空腹值只能具有一个非冒号的缩音,这什么意思呢?就是说 矩阵 a 的单个元素如果删除掉的话,矩阵就不能保持矩形了,因为这里少了一个元素嘛。矩阵 a 必须是完整的行和完整的列组成的,也就是说必须删除整行或者整列的元素,才能让矩阵删除后保持矩形。 刚说过不能使用下标缩影进行单个元素的删除,那么可以使用线性缩影进行单个元素的删除吗? f 运行, 这个错误是这里的, but 注视掉 f 运行,可以看到没有报错,而且给出了结果, 这个结果解释一下,这是矩阵 a 的线性所引,那么矩阵 a 呢?会按照列优先把这一组矩阵扩展成一个数字序列, 这是四乘以四的,应该是有十六个数字,扩展成这个数字序列之后,然后找到第二个元素把它删除掉。第二个元素是十,那么把十删除掉以后,就是一七零三六九零,一七零、三六九零,依次按列优先往后排序的。 注意这两种缩阴删除元素的差别, 这一节讲到这里。
49freexyn 00:46查看AI文稿AI文稿
00:46查看AI文稿AI文稿旋转矩阵是科学,不是玄学,也不是某些老铁说的转呀转呀的,开上号码就转出来了。实际上它是一种组合设计,叫做覆盖设计。而覆盖设计、填装设计、斯坦纳系和 t 设计都是离散数学中的组合优化问题, 他们是解决如何组合集合中的元素达到某种特定的要求啊,这其中最关键的就是算法, 我们普通人学习散法确实是比较困难,但是好在现在有非常好的那种封装好的工具,我们只要学会使用这些工具就可以了。 在我们玩大乐透双色球或者是一些组合排列类的游戏啊,都可以利用旋转矩阵中的组合设计进行号码缩水,降低成本啊,这很关键,很有用,也很有意思。
225店主阿敬 31:44
31:44 02:13查看AI文稿AI文稿
02:13查看AI文稿AI文稿今天学习了一下旋转矩阵,因为之前写 led 旋转显示方向时只能按九十度旋转,不是很实用,所以想写一个任意角度的。这里以六乘八的字体为例, 先旋转零度,与原字体重合。先用大写的 a 分来进行测试。因为要旋转,我划了一个十二乘十二的区域,用来存放每一个点,相当于 alate 中的一个像素 九十度的整数。背时这些点都在线上,坐标都是整数。再来测试一下逆时针旋转四十五度, 这个旋转后的效果就不怎么好了,因为没有完全在坐标上。我是对旋转后的矩阵元素取了整,相当于落在相邻点上,看着还是有个 f 的模样。 再测试九十度, 这个就很完美,标准的落在坐标轴上。 再来测试一个六十度,效果也是不怎么好,因为像素点有限,如果画太大,一个 ily 的屏幕都显示不了多少东西,只能牺牲一点效果了。不知道有没有什么更好的办法实现 这个一百五十度看着也还挺好。 i could talk。
17山间朝暮 00:37查看AI文稿AI文稿
00:37查看AI文稿AI文稿什么是旋转矩阵?借用电脑手段来选择的一种叫做旋转矩阵,用这个方法呢,就是说把你喜欢的这种某一两个号码作为胆的号码, 就说你的幸运数字也好,然后呢,通过电脑把你这个号码输进去,用旋转矩阵这个软件测算出来, 给你一次排列出来的号码,这是一种通过电脑进行号码的一种组合的数学优化方式,但是呢,这种不是包括复式,指的是单次号码选择,买单次的时候呢,作为一种参考方法吧,关注我,沾喜气!
262河南省体育彩票管理中心 00:42
00:42 04:26
04:26 08:0025哈维德软件
08:0025哈维德软件 01:17查看AI文稿AI文稿
01:17查看AI文稿AI文稿我们现在把矩阵挤压制作出来之后,我们把刚刚复制的那个小的立方体呢给他进行缩小,同样的我们在这边给他进行一下又是一个矩阵挤压。 但是这次的矩阵挤压呢?我们要改变一下它的旋转和方向, 然后我们来把在矩阵挤压当中来把它的步数来进行一下调整。我们现在来制作的就是耳机的那个部分, 我们现在来改变矩阵挤压里边的数值,我们来先移动一下它的位置, 移动、缩放、旋转、变化这几个作用大家应该都能理解, 我们只要来根据我们要的这个效果来调整他的这个位置就可以了。


