
粉丝9560获赞1.9万
相关视频
 07:26131奶爸老冯
07:26131奶爸老冯 13:2669奶爸老冯
13:2669奶爸老冯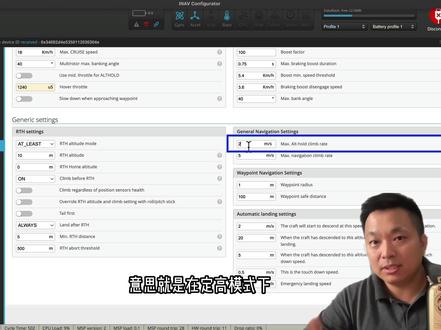 03:00查看AI文稿AI文稿
03:00查看AI文稿AI文稿大家好,我是 k z, 欢迎回来,接下来介绍 i n a v 里面定高飞行模式它的几个重要的 参数。定高飞行大家知道油门控制的不再是直接的动力输出,而是他的爬升率或者下降率,是在高级设置里面,这边 上面一个就是他的最大的定高模式下的爬升率,他的单位呢是米每秒, 默认二两米每秒,意思就是在定高模式下,我油门给到最大,飞机以两米每秒的速度向上升,这是一个匀速的,那如果我油门回中, 那么他就是保持高度,他就变成了零米每秒,如果我往下拉到底,那他就是以两米每秒的速度往下降,我打百分之七十五的油门,那么他可能爬胜率就是一米每秒。 接下来来讲一个很关键的问题,因为我们的很多遥控器啊,他不是回中杆,不是回中油门,是不是 啊?我们的油门中间是不是很精准的,我们每次要把它定在终点,让他悬停,很难很难,所以在这个油门中值来控制定高的时候,我们需要有一个 油门的死区,那么这个值呢?在页面上面暂时是没有的,我们需要来到命令行模式里面,我们来看一下啊 band 死去好,我们就可以看到里面有一个叫做 art hold deadband, 默认是五十,那么这个五十呢,就应该是正负五十, 也就是说那么他在一四五零和一五五零之间,你轻轻的去动,他是可以忽略不计的。那么如果一些新手或者一些青少年的时候手比较燥,或者呃比较控制比较粗糙的话,我们还可以把这个值去抬高, ctrl c、 ctrl v 前面加一个 set, 我们现在要把它设置到七十啊,回车,然后再 sav 保存啊退出,它就变成了百分之七十,那么 这个就是定高时候油门的死区,终点的死区。那么关于定高的油门有有两个选项,是这个和这个 一个开关一个竖直,那么当我们打开这个开关的时候,他就默认把绝对的中指油门当做我们定高控制器的零点或者居中点,或者是定高点。这有个什么问题呢?比如说我们的。
248星辰大海 kz 14:03查看AI文稿AI文稿
14:03查看AI文稿AI文稿eighty nuts be one be one rotate positive great four hundred one thousand thousand some feet stabilized mr perch out the suit said five hundred four hundred three hundred two hundred one hundred fifty forty thirty twenty ten ten ten。
 05:519黑白熊儿
05:519黑白熊儿







猜你喜欢
- 4.9万小影娱乐