c4d怎么让摄像机跟着物体移动

粉丝1.1万获赞10.2万
相关视频
 00:55查看AI文稿AI文稿
00:55查看AI文稿AI文稿镜头在移动,但是我们这个特效他会跟着我们地面做一个跟踪,是吧?这种就用到我们的摄像机板球啊?听不懂是吧?没关系,我们演示一下,我们把这个特效删掉,然后现在我们固定镜头,然后添加一个特效素材上去,然后现在我们移动一下镜头,来移动一下能发现什么? 这个特效素材它是固定在我们画面中,并不会匹配我们的场景的,我们就要用到三三七分钟,我们打开我们的, 然后找到里面的完全解析,然后把我们这段视频添加上去啊,解析完,然后我们现在能看到他设置一下这个坐标轴啊,上下左右,然后再设置一下界面, 然后我们现在把这个模型放到我们设置好的地面上这个位置上, ok, 我们现在再来移动一下这个镜头,看一下是不是就是跟踪好了。
439小杰同学 02:16查看AI文稿AI文稿
02:16查看AI文稿AI文稿c 四 d 提高工作效率的实用小技巧十三、打光技巧当我们对场景做完之后,我们开始进行一个灯光处理,我们如果不想动这个视图的话,我们可以选择鼠标中键,然后点击一下,可以看到有四视图,可以用我们其中的一个为视图进行一个改变。 比如说我们进入这个第三视图左视图,我们点击摄像机,然后点击透视视图,之后点击他的一个显示模式,然后把它改为一个快速着色线条,这样的话可以看到他就变成了我们这个线条显示的模式,而且我们这边动这个视图,他是不会动我们的一个渲染视图的, 所以说我们可以用这个。第三试图进行打光,我们打光技巧主要有两种,第一种可以选择他的一个目标区域光,我们选中其中一个物体,点中这个目标区域光, 可以看到他就新建了一个目标区域光,我们可以对他进一个拖拽,可以看到我们不管怎么拖拽,他始终是面朝我们这个物体的,刚才因为我们选中的是这个,如果我们换一个目标对象,他就会进行一个改变,比如说我们在新建一个立方体, 然后把它放在这个位置,然后把选中这个目标对象,把这个立方体拖拽给他的目标对象,他就是一直朝向我们这个目标对象的一个方向,比如说我们对他进行一个移动,他就会跟着这个立方体的方向进行移动,好的,我们先把它进行删除, 新建一个区域光,然后邮件给他一个动画标签里的目标标签,这样的话跟我们直接新建目标区域光是一样的,然后我们把它删除。第二种方法,同样新建一个区域光,然后把它稍微拖拽一下,就可以把它当做摄像机来进行使用,比如说 我们点中摄像机,选择使用摄像机,使用设置活动对象为摄像机,这样的话我们就会把我们的灯光变成摄像机的一个形式来进行一个处理,这样我们直接旋转画面就可以控制灯光的方向,可以看到现在就是这样,这样的话更容易控制一些, 我们可以用这种方法对他进行打各种各样的高光,第一种方法适合用来当日光使用,第二种方法适合给物体打高光。好了,这就是我们灯光使用的两个小技巧,如果觉得视频对你有用的话,记得点赞收藏哦!
365昊天C4D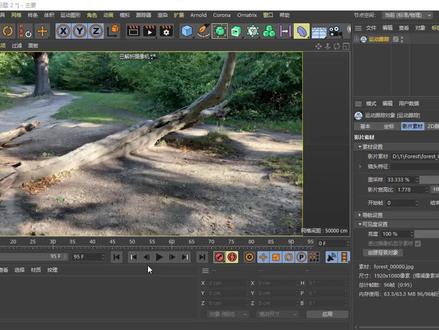 03:52查看AI文稿AI文稿
03:52查看AI文稿AI文稿咱们在做这个实景合成的时候,多数其实还是动态的背景,所以这次咱们就说说怎么把这个动态的摄像机给算出来。那么对于这个背景来讲,他是最简单的了,就是啥呢?里边没有变形的东西,还有移动的东西,就是远处的树枝吧,受这个风吹的影响,稍微有点动,咱们可以忽略这个, 那么现在咋做呢?这样啊,咱们先新建一个,然后点这个跟踪器,直接点他完全解析, 然后咱们现在找到这个素材就行了,你就选其中一针就可以点打开,然后下边他有个进度,你就等着他算完, 行,这完事了,完事之后咱们现在把这个组给他展开,看看是不是他就算出一个摄像机了,咱们点这点灭他切换到透视图拨一下,再看到这个摄像机,他是不是运动的,但是他有什么问题,他有 这问题,他算是摄像机是平的,然后地面是斜的,咱们还是切换到摄像机,试图点一下,这也就是咱们这个拍的时候,明显看着这个摄像机是俯视的, 所以这你得正一正,你要是不正他的话,以后你建模的话也比较麻烦,你那模型都得去转呢。所以咱们现在在这个运动跟踪上按右键,然后选这个跟踪标签。 那么首先呢咱们贴一个这个位置约束,就是把坐标原点给他确定下来,然后这里你就拖这个小黄点,你一般哪块想当坐标原点的话,你就拖过来松手就行了,默认的话他就把他作为坐标零零零,然后你注意一下,看一下你选这个点啊,他是不是绿色,就是越绿的话,证明他算的精度是越高的。 然后接着咱们把歪轴给他确定出来,再按右键还是跟踪标签,咱们选这个 面约束,那么他会出三个点,那么现在你就拖到让他吸到其中三个小绿圈上来, 那么这个西的话你不能随便拖,就是这三个点肯定得是地面上的点,或者他在同一平面上才能行,然后你看一看就是他越绿的话就越好, 那么现在他有问题啊,就是这个地他有点不平,他算出这个东西他也不是太准,所以你可以怎么办呢?然后在这啊,他们算出好多这个特征点啊,比如咱们现在看这个零七幺幺,是不是他也是地面上点吧,所以现在你选择这个标签,把这零七幺幺也拖到这里头,这样他会减小这个平均误差, 你可以多拖点,我就不再拖了。那么现在他默认的话,他就把他作为歪轴看,没有。那么最后呢,咱们再确定一下比例,为啥要确定比例呢?比如我创建一个方块,你看一看这方块 这么大啊,这就不对劲,因为那个方块模式才两米啊,你想一下咱们这块场地的话,他有多大呀?那么这个比例的话,你就再贴个标签,再这样按右键,咱们选这个跟踪标签,咱们选这个适量约束, 然后他又出来俩点,咱们现在就拖到吸附一下,咱们就随便给他吸附两个位置就行。 然后这个长度的话,你选这个已知,那么这块比如他是多少厘米,咱们可以估计一下啊,你要是拍的时候给这块量出来,那就更好了,比如现在我给他估计是二百厘米,那么这回你再创建一个方块,你看一看, 就咱们估计的线有点不太对,所以现在你还得改一改,还是选中这个标签。比如现在咱们给他估计成一千厘米,然后你看这方块 是不是他就变小了吧?咱们让他是五百厘米左右吧,比如两米大概就差不多。 然后咱们这方块给他往上挪一挪啊,你给切换到四个视图去挪去,要不然他不准,也就是大概这是地面,那这个方块的话就在这,然后这么挪一挪, 放这,这回再拨一下看看啊,这就没问题了,跟踪这块就完事了。
263cclylaoshi 00:44查看AI文稿AI文稿
00:44查看AI文稿AI文稿平时刷视频你是不是经常看到这种风格,但你又不知道怎么做的,今天我就花重金聘请了这个楼下跳舞大哥,让他半夜跑你家,教你怎么做这种实景合成。 首先点一下这个运动跟踪,然后我们这里选择你需要的影片,加载这里的才样给到一百就 ok。 第二步,点击二 d 跟踪,点击自动跟踪,再点击三 d 解析当中的运行三 d 解析器,解算完成之后,把特征点选中一下,然后我们的跟踪摄像机就得到了,看一下画面的效果,这里选四个绿色的点,右键添加 下一个平面约束标签,把刚才选中点扔进去,点击创业平面,这个时候你就得到了反球的坐标平面以及摄像机,后面还有一些合成的操作,那么这里我录着完整慢放教程,有需要的还是橘子记得双击么么么么哒。
3175多汁橘子强壮版 08:34查看AI文稿AI文稿
08:34查看AI文稿AI文稿摇臂摄像机可能是 csd 里面最适合做产品动画的摄像机了,它功能全面,可操作性也比较强。大家好,我是阿可,这节课我们用一个案例带着大家去学习一下这个摇臂摄像机。好,我们先看一下摇臂摄像机运镜的效果, 来,我们退出上上机视角观察一下,看一下这个摄像机是怎么动的啊? ok, 然后我们打开舞台,再看一下双镜效果,就两个摄像机合在一起的效果做了一个转场。 行,接下来我们就看一下这个摇臂摄像机啊怎么去用,我们可以观察得到,就是首先有一个下 这样的动作,然后下降的过程当中摄像机好像发生了倾斜,然后随之哎又从这个右侧摆到了正面,然后有个后拉的一个动作。首先摇臂摄像机的话看上去可能会比较复杂,来,我们点击这里添加一个摇臂摄像机, 那像刚才这个运镜的话,我们就要保证几个点,第一就是摇臂摄像机就必须哈是放在这个组里面才可以移动的,如果你拿出来他就是没有办法去移动的。好,我们把它放到这个组里面去移动,这个组就可以移动他。 ok, 那接下来我们第一件事情,先把这个 轴心放到和产品一样的位置啊,就是先让他落地。摇臂摄像机看上去参数有很多,但是他每一个参数其实都是有方法可以 去依托的。 ok, 那这是第一步,那接下来我们点击这个标签,你可以看到他有很多参数啊,我们把它按照几个栏目去看,第一栏 基座栏,第二栏吊臂栏,第三栏云台,第四栏摄像机,那基座的话主要就是两个参数哈,一个是朝向,就是控制这个大的一个基座 他往哪边去旋转,他可以三百六十度无死角的去旋转哈,那高度的话控制的就是这个基座的整体的一个高度啊,这个很好理解。那吊臂长度的话,就是你看到的这根吊臂了啊, 它的长度,然后下面你看这个高度,它的单位是度数哈,它是以角度去计算的,而不是以长度去计算的啊。比如说我把它这个高度改为零, 他就变成一个很很普通的一个视角。然后这时候比如说我想做一个简单的前推或者后拉,可以通过控制这根吊臂的长度来实现这个效果的一个调节。好,那云台的话就是你看到的这一小部分的一个结构,就这部分结构就是云台哈, 来吊臂就这个云台的高度,然后你可以看到就是默认的话,他有个三十五的一个参数在这边,就是让你可以看到这边还有一个比较小的一个吊臂, 这个也是可以去移动的,那整体云台他也可以进行一个旋转,所以说摇臂摄像机啊,他是一个非常多功能化的摄像机啊。然后再看最后一栏,这里有一个仰角倾斜和偏移,仰角的话就是 控制摄像机抬头低头倾斜就控制摇头就画面倾斜,倾斜与否偏移,就是摄像机的前推后拉哈,现在他没有拍着产品,对不对?你可以看到这栏有这个目标栏, 你可以把你这个对象,比如说你的产品拉到这个目标栏里面,他可以自动去锁定这个东西, 那这时候不管你摄像机怎么动,他都是对着这个产品的,那这方法一,方法二的话,你也可以干嘛呢?右键单击动画标签,添加一个目标标签,将你要拍摄的对象丢进去也可以,但是如果你用目标标签的话,我建议你 在上行史料里面把产品也丢进去,防止他的坐标出现错乱哈。好,那我们这边暂时先用这个方式。第一件事情我们需要把吊臂调到顶突顶部去, 那这边把它的高度改为九十度,他就摇到顶部去了。现在进入摄像机视角观察一下来,接下来把高度调高一点,点开头开一个关键针啊,比如说我们先给他设置到一千二百的高度, 然后到六十针的时候呢,下降到这个位置,比如说两百,拉到特别近的距离。好,现在播放一下, 那第一个动作就完成了,那接下来就是高度正常是就是对不对?我们来到这边之后的话,把它改到十左右,就这样的话我们就可以由顶部摇到底部来,现在再去播放一下, 现在他就有了这么一个动作。那接下来第三个问题,就是他摇下来之后还要拉远, 拉远,我们再把这个参数给他 k k 大,比如说给到一千五,那这个基础关键针就可以完了,高度我们可以把它调为零啊。 如果说你看到这种镜头突然角度切换的一个情况,那大概率就是目标出了问题,我们把这个目标清楚,给他添加一个动画标签,目标标签,然后将产品丢进去,两个都丢一下,确保他的坐标不会出问题, 好,现在坐标就不会出问题了,那这个运镜就完成了。但是我们还需要调一下它的函数曲线, 这里很明显是穿模了,对吧?那我们就需要让他这个函数曲线,比如说下降的时候,这个高度的函数曲,函数曲线稍微快一点点, ctrl 加 a 选中,找到穿模的这一瞬间, 将这个节点拉狠,让他前面旋转的这个动作啊变慢一点, ok, 那这个动作就完全了,对吧?就穿模的问题就解决了。接下来就是调臂长度的速率,就是我们降下来之后 往后推,这一瞬间是很快的,对不对?那我们就需要让他快一些,快的方式有很多,第一种把后面这个节点往前推,那这里的话他就会很快, ok, 那这个的话就是吊臂的一个使用,那我们现在的话再加一个基础参数,比如说我希望我的画面一开始有一定的倾斜,那我可以一开始,比如说画面倾斜个九十度,只是来到这里的时候呢, 给画面给他掰正 k 正,那现在的话画面就会多一个倾斜的动作,看上去就炫酷了很多。 那如果说我给他一定的宽度的话,他就会有一定的角度偏移,看到没有?比如说我们进入视角观察,他就会有一定的角度偏移,那比如说我希望他下降下来的时候,他是一个侧面来,我们再从头播放一下, 哎,然后我们最终的话,再慢慢的摇到绝对的正面, 一个很酷的运镜就完成了。那假设现在我想要添加一个转场,那我们就让他在最快的这一瞬间完成转场,比如说在七十帧的时候有个加速后拉的动作, 接下来我们绕到背面打一个摄像机,来到坐标里面,将它所有的参数校正为整数, 紧接着冻结坐标。七时针我们可以稍微朝前一点点,在这里好,结尾的时候我们往后拉,拉到这里,那我们上一个镜头结尾的速率是很快的,就把这个镜头开头的速率也调成很快的。 好,接下来播放一下,那这就是 v 一, v 二添加一个舞台, 在七十针的时候将一号拉进去 k 针,好,七十一针的时候把 v 二拉进来, k 针完毕,来我们先播放一下, ok, 那这个镜头就完成了切换。这节课咱们就先分享到这里,后面还会有一些其他的案例,可能需要用到这个摇臂摄像机。下节课咱们再分享一下运动摄像机的一个基本使用方法。
351阿肯 06:04查看AI文稿AI文稿
06:04查看AI文稿AI文稿这是场景当中的物体,并没有发生改变,而是我们的视角在进行变化,那么视角在变化其实就是摄像机的动画,我们在这里看一条样片, 大家先不要去留意这些会动的样条,我们单独看这些山体和摆放在中间的这些球体, 假如是自然界当中的一座山,但没有力的作用下,他肯定是不会改变位置的,那么场景当中产生 运动的肯定是我们的视角,在软件当中来说肯定就是摄像机的变化,我已经提前放好了这些删体以及球体的位置,那么现在我们去创建一架摄像机, 找到倒数第二个图标,其实摄像机我们在之前也已经用过,安静一下这个图标就能在对象面板看到一个摄像机,对象 在场景当中也会出现一架小小的摄像机,我们进入摄像机视角才能够看到摄像机所处的画面, 那么单机后放到小方框,让它变成高亮的白色显示之后又代表着 我们进入了摄像机的视角,和 ccd 的视图操作是一模一样的。我们用 aot 加上鼠标左键,鼠标中键,鼠标右键 用能够对摄像机的视角与进行旋转、平移和推拉,那么这个地方我们选择摄像机之后找到坐标, 我们在改变视角的情况下,其实就是在调整摄像机的位置和角度, 这个也很好理解,那么在参数当中,每一项参数前方都是有小圆点的,代表我们可以给这些参数配上关键 认真,从而形成摄像机的运动动画。那么由于这些参数有九个,我们一个一个去单击的话,就显得有些太过麻烦了, 而且现在我不小心单击错了,很明显初始的角度并不是在当前的这个位置。我们怎么样快速的删除掉这些关键针呢? 按住 ctrl 加 shift 键,在 ctrl 和 shift 同时按住的情况下,不要松开手,用鼠标左键去单击进行小圆点, 我们单击这些小圆点的时候,就能够让它变成默认的灰色,这样就能够快速的将 将这些关键针删除掉,我们再来操作一次,那么一个一个去点击,相对来说会有一些麻烦,我们鼠标左键按住不松手,快速的拖拽, 这样在操作的时候这个鼠标就会变成一把小刷子,能够快速将这些关键针全部都记录下来, 对于删除也是这样操作,按住 ctrl 和设备键,快速的用手的左键从上往下滑动, 这样就可以快速删除掉关键针,那么这里我们还有一个更加便捷的方法,大家可以看到下方我放大 给大家看,这个地方有一把红色的小钥匙,那么这个钥匙就能够记录位置,缩放、旋转这三项参数的所有关键针, 我们在这里可以快速的单击一下,你就能发现所有的参数,当然只是在坐标当中的位置缩放、旋转他们都被记录上的关键针, 他也只能够记住这三项的关键针,比如现在我们去看对象当中的参数,前方也有很多数值是可以记住关键针的, 但是这一把小钥匙,那么现在我们去调整好摄像机的角度,让他尽量的贴近地面安静一下。 这个小钥匙快速记录位置,缩放旋转的关键针,我们将这个动画标尺滑动到第五百针的位置,让摄像机往前推进, 快速的推进到后方一些的位置,调整一下摄像机的视角, 然后我们去单击这个小钥匙,那么现在在第零针和第五百针之间,这相机就会形成一段运动, 我们可以看到当前的效果,单击这个三角形,点击播放, 很轻松的就能够制作出来样片当中摄像机往前推进的动画。
65环湃传媒 01:21
01:21 13:48查看AI文稿AI文稿
13:48查看AI文稿AI文稿什么是运动追踪?为什么他很重要?每当你想把 cd 画面放置在实拍素材里的时候,你需要对镜头进行运动跟踪。运动跟踪只是为了弄清楚拍摄好的素材里面相机在哪里,以 他是如何移动的。这就是为什么他通常被称为匹配移动或者叫摄像头跟踪。在整个课程中,我将介绍摄影机追踪的常见方式。他不仅是一项重要的职业技能,更重要的是选用正确的方法为观众创造一个令人幸福的合成画面。 我们的目标是匹配什么?我们想知道相机的位置,方向,还有焦距。我们想知道场景的规模。一旦你知道真正的相机是如何移动的,您可以创建该相机的三 d 数据去完美还原他,去还原那个在 实拍里面拍摄人或者场景的摄影机。我们创造了一个连接三 d 世界和现实世界的通道。 摄影机追踪是如何运行的?运动跟踪是基于分析和跟踪原始素材中的标记点或特征。跟踪点位于镜头的不同深度,并且在不同的位置。 所以 c 四 d 可以根据他们与相机的距离产生了速度差去计算他们的移动,这被称为是差。我们实现像样的摄像机轨迹需要采取哪些步骤呢? 好的,首先我们需要了解最终的结果。你可能会问自己的一个问题是,我要怎么处理这个镜头,所以我们可以通过分析镜头来做到这一点,这是非常重要的一步。我们可以识别问题区域以及好的区域。 我们还会知道镜头是否有任何镜头失真。如果是这样,我们需要删除他, 这将改变我们的工作流程。然后我们可以设计创建我们自己的项目,并导入素材进实拍里。 所以你一定要确保 c 四 d 帧数匹配实拍素材的实际帧数和画幅尺寸。然后我们可以开始进行二 d 跟踪。我们可以使用自动和手动跟踪方式。 有了足够的二低轨迹,我们就可以计算出相机数据。我们可以判断相机的移动是否正确,还是我们需要改进追踪方式 之后,我们可以使用约束标签来建立坐标系。我们可以正确定位场景并设置比例。然后通过添加简单的几何图形,我们可以测试计算结果。从这里我 我们可以选择导出数据在另一个应用程序中使用,或继续在 c n m 四 d 中使用它。让我们看一下 c n m 四 d 中的运动跟踪具体的部分。我们会更深入使用运动跟踪器对象,但在我们这样做之前,我们要重点学习完全解析这个功能, 这是个全自动功能。来到跟踪器菜单,点击完全解析,我们加载一个镜头序列, 然后 c 四 d 就开始工作了。我们看到大缸里有一个运动跟踪器对象,并加载了素材,然后进行自动跟踪,然后将计算三滴相机重建。 你可以在左下角的状态栏中看到正在进行的计算进展。你现在可以看到我们有所有这些红红绿绿的圈圈, 这些是跟踪点图标,所以我们现在可以播放了。几乎所有的追踪点都紧贴场景。 我也注意到一些问题,我们稍后会讨论这些。但在大多数情况下,如果我们回到场景默认相机里,在这里看到所有这些追踪点的样子。 大缸里有所有追踪点对象。现在让我们回到这台相机。我们将点击运动跟踪器。 如果你感觉满意,就来到三 d 解析选项卡,锁定已解析的数据。然后你可以开始使用跟踪器标签添加约束,缩放和定向场景。 所以这个完整解析命令会省去一些手动步骤。最后你得到一个像样的轨道相机。值得注意的是,你可以 使用完全解析命令。如果我们已经创建了一个运动跟踪器并加载到镜头中, 你仍然可以使用完全解析命令覆盖掉二 d 解析和三 d 解析的效果,但你也可能需要退回来进行一些手动调整以获得最佳结果。 让我们看看我们的结果如何。先回放镜头,我可以看到我们跟踪了一个移动的鸟。这是不好的结果。 远处还有一些追踪到了反射空间,远远超过了我们需要的部分。如果我们过来编辑和选择项目,设置我们的每秒针数为三十。 我知道我以每秒二十四针的速度拍摄。所以如果我们要合成一些 cg 进去,这里是不匹配的。为了进入我们的 渲染设置,他计算出图像的宽度和高度。这很好,但针数没有变。所以请记住,如果您使用的是图像序列,就像我们在这里一样,我们需要事先手动设置每秒针数。这只是需要注意的事情,用于处理以后的镜头。 在埋头进入追踪阶段之前,分析一个镜头真的很重要,我们接下来会研究它。 在跟踪之前,分析镜头非常重要。看看这个镜头,我们可以看到我不想追踪这只鸟就是在画面顶部的天空中飞行的。这个右边的窗户上有反射,似乎有一些不错的地方。 严谨这一块还行。如果我们记得在解析之前去掉任何不需要的东西,我有信心我们可以得到 一个不错的结果。在解散前,我们先要认真分析了解背景画面。让我们讨论一些你在分析镜头时可能会遇到以及这些问题的一些可能解决方案。 你可以有运动的物体,他们相对于相机的运动,正在以不同的方向在移动,所以他们会破坏解析。还有距离太远的物体,比如天上的云,太远的话对解析也是没有意义的。 没有明确的位置关系,倒影也不行。因为他们反射了世界场景物体,所以他们会向反方向移动。 如果跟踪一个被遮挡的目标,例如,如果他从另一个物体后面经过,或者有什么东西挡住他了,那么我们也会失去那个追踪点。运动模糊可能是一个问题,如果他变形和扭曲的时候 很难被观察到的。噪点大的镜头也难以追踪,因为噪点不断的从一个像素跑到另一个像素,这也会扰乱跟踪器。 从模式来看,追踪点是用各种算法去寻找每一针的像素,如果拍摄对比度低,可能也很难捕捉。如果整个镜头都是虚焦的,那会让人抓狂,因为所有追踪目标全模糊了。 那么遇到这些怎么办呢?对于运动的物体,远处的物体反射这类。您可以在跟踪之前将他们遮照, 或者在解散之前删除那些错误的点。如果一个点被遮挡,我们看不到他,或者他移动到一个物体后面,然后重新又出现了。我们可以在特征被遮 挡之前设置一个关键针。然后当他返回视图时,我们可以设置另一个关键针, 然后让这个软件插入间隙,所以他会猜测该特征的去向。这至少是一个可行的解决办法。如果您遇到运动模糊,你正在追踪他,您可以尝试扩大模式或搜索区域。 那是什么?如图,这是一个追踪器,加号是特征中心,内核是追踪区。软件会跟踪内框之内的图案。 外框是搜索区域,所以他在搜索区域寻找模式。在模糊的时候,你可以增加这些框的大小,他肯定会有所帮助。对于有噪点的镜头,请尝试在跟踪前去除颗粒。 如果镜头对比度低,尝试隔离具有最强对比度的通道。跟踪器一般来说是通过图像的亮度来工作的。 如果蓝色通道是最强烈的对比,你可以把它单独分离。跟踪单独的通道,但只要知道 c 四 d 的跟踪器视图允许你混合某些级别的亮度, 因此你可以真正自定义跟踪器所捕捉的内容。当我们进入手动跟踪时候, 遇到镜头有些虚焦,你可以尝试模糊图像。按听着有点违反常理,但这么做后,通过增加追踪器尺寸,通常可以使解析顺利进行。 通过前面提到的分析,我们发现这个片段没有太多棘手的问题。只要我们不追踪 冬天上的鸟和玻璃的反射,取景来看,似乎我们主要是要针对路面做分析, 所以我们可以在那里放置一个三 d 对象,或者做些有趣的事。另外要提到一点,现场记录你摄影机的参数也同样重要,或者现场测量一些尺寸等等,用来后期参考 分析。片段里未知的一些信息已被后用,我们来进行下一个阶段追踪部分。在这部分里我要先设定项目, 以便我们准备好跟踪。我们要尝试使用自动解析,在这个实力里面,我们将使用运动跟踪对象完成一个完整的工作流程。编辑菜单里找到项目设置,我们将每秒 针数更改为二十四,因为实拍素材是二十四针的同时,别忘了把渲染设置里的输出针数也改为二十四。然后界面布局更改为运动捕捉,他要求我双击来创建一个运动捕捉物体, 再次双击来读取一个序列片段。选择第一针的图像打开,你能看到他立即流畅的播放起来, 但看着有些模糊,因为软件对图像进行了重新采样,从两 k 降低到了六百四十匹, 下降的原因是内存问题,如果你电脑内存不足的话就会降低采样,目的是保持流畅的回放观看。如果你是土豪,那么你就可以直接拉满采样, 我是三十二 g, 内存够用了,就把它改为百分之一百。一般来说你要跟踪的话就需要最高的质量, 所以现在我们已经准备好进行二弟跟踪了。在二弟解析标签下,我们看到第一个字标签就是自动跟踪, 我们这个小练习的目的就是生成三 d 摄影机匹配拍摄的视频。我们以后就叫解析相机,我们通过提供运动跟踪器对象来做到这一点。有关的数据来源于跟踪鬼,或者叫特征 默认值。跟踪轨是三百个,最小间距是十九,通常这个配置是不错的。如果我们选择创建自动轨道,我们将看到 c 四 d 将如何挑选镜头中的一些特征, 并将他们用作跟踪点。我们在高对比度区域有不同特征的集群,为了顺利解析,我们需要在每个镜头里保持同样多的追踪点,所以这个自动替换丢失轨迹是要勾选的。 然后我点一下删除自动跟踪鬼,再点击自动跟踪,他会加载素材并开始分析,他会寻找特征,添加追踪鬼去追踪他们并删掉不好的部分, 然后就出现结果了。让我们播放一下这个镜头,你可以看到轨迹特征被标记出来,这些洋红色的钻石装的图标就是有些像尾巴的东西。跟着他们 让我们降低亮度,进入影片素材标签,你在可见性设置中看到 我们可以降低亮度,这么做可以明显减少这些没用的追踪点出现,只留下明显一些的特征。 暂停一下这里我们知道这个不会被很好的计算,还有这里窗户上的反射, 然后我们再看看哪里的点是晃晃悠悠的。如果你观察这些运动路径的小尾巴, 看到他们通常都朝着正确的方向前进,那么你可以确定这些没问题。 轨迹看着很统一,我们会在后面的篇章中介绍如何改进 跟踪轨迹的项目,恢复亮度到百分之一百。所以当你在跟踪短片时,要为三维空间出发, 要保证镜头里每个深度的位置都有轨迹特征。所以我想这里的关键要点是轨迹越少越好,只要他们准确度要很高。所以现在我们知道自动二 d 解析是如何攻速的,让我们继续探索手动二 d 解析。
63贫道看老高 00:53查看AI文稿AI文稿
00:53查看AI文稿AI文稿今天一个小伙伴来问我怎么去制作一个旋转的摄像机镜头看,那接下来我给大家讲一讲,那这个镜头到底是如何去制作的?首先我们先建立一个摄像机,然后我们再建立一个螺旋线,调整他的一个大小与比例, 然后找到摄像机右键里面,给他找到这个对齐曲线的一个标签,给到他还是摄像机右键里面,找到一个目标的标签给到摄像机,在这个对齐曲线的属性里面把这个螺旋线给他拖进来,在目标标签里面呢,把我们的焦点对象给他拖进来, 在对齐曲线的属性里面调节他的位置,就能看到我们的摄影机在这个路径上去走了。这个时候只要在这个第零针和第一百二十针,我们给他分别插入一个固定针就可以了,这时候我们就可以 去制作一个简单的小动画了,然后激活我们的摄影机就可以点击播放,学会了吗?记得点赞收藏哦!
3231一凡C4D课堂 02:45查看AI文稿AI文稿
02:45查看AI文稿AI文稿本人的里面的摄像机围着物体,也就是我们的产品做旋转路径以及输放的一个动画,三百六十度旋转的一个动画。然后我们来看一下,上面是我们的一个操作窗口,下面是预览窗口,我们来看一下这里面有几个东西在动,首先是这个圆圈就三百六十度,第二个就是我们的摄像机, 第三个是我们的一个空对象在上升,你想达到这样一个效果的话,如果你靠一个摄像机是很难做得到的,我们来看一下这个怎么操作。首先我们这里需要有几个物体,第一个就是我们的产品摄像机以及路径加一个空对象,我们选择我们的摄像机,找到我们的一个约束,到约束里面用一个路径跟随, 也就是我们要跟随这个路径,用吸管吸一下这个路径就吸进来了,这个时候我们到这个偏音量里面可以看到我们的摄像机在围着他三百六十度旋转,但是现在目的是我们没有去跟随我们的一个目标中心,我们需要选择这个空对象,看没有空对象现在跟我们的目标在一起,我们选择这个摄像机,然后到这个位置去找, 找到我们的一个标准跟随,用标准跟随吸管吸一下这个空对象,他就跟随了这个空对象,这个时候我们就可以来做动画了,我们的第零针选择我们的这个路径,然后按一下 i 键,然后到第六十针,我们把我们的这个路径缩小,就让我们的产品到我们的一个中心画面,这个时候我们就有一个从小到大的一个 动画,然后我们还需要我们的产品到我们的正面来,首先我们到这个位置需要去找到我们的一个摄像机,在摄像机这个位置他不是有个偏音量吗?这个偏音量要把这个跟随路径跟随曲线把它勾水一下,这时候我们到第六十针最后一针的时候把它转正, ok, 我们比如说我们再转一圈吧,比如说我们把它转到个一百一十八度转正, ok, 我们到这个位置点一下,然后我们到定零正的时候让他是零,好,这个时候我们就是让他边旋转边放大转正,看没有,他就一个旋转放大,然后变转, 这又太远了,我们需要再把这个路径再把它缩小缩小推近一点, ok, 我们需要再把它再开一下, ok, 他就是从远放大旋转变近一个上升有些变化。首先我们在第零针的时候,让他在这里空对象,然后第六十针的时候让他看到没有,让他下来回到我们的 中心,这个时候我们的动画又丰富了一些,让他从远处上升,慢慢的旋转变大,还可以让他的动画更丰富。我们到第六十针的时候,我们刚才不是这个路径放大了吗?我们现在让他上下,我们来看一下是什么样的。我们到第六十针的时候看到没有,我们可以让他的摄像机 去这样去变化,这个时候他就更丰富了,比如说我们到第零针的时候,我让他的摄像机是这样的,让他是俯视图,我们再 k 一下,然后到第六十针是这样的看没有,这个时候我们的动画细节就非常非常的丰富,从远景到近景旋 转以及倾斜打正这样丰富的细节变化,你单靠一个摄像机是很难完成的,我们这里面是需要几个对象去辅助我们摄像机来完成的。 ok, 今天就讲的这是一个很实用的一个技巧,就是摄像机动画。
202设计师方潘 00:33查看AI文稿AI文稿
00:33查看AI文稿AI文稿还在因为相机不好操控会打官认真而烦恼。三十秒学会他相机动画和玩游戏一样。打开工具漫游,虚拟漫游。 先熟悉一下键位,鼠标左键可以控制方向,转身为正常模式,快速调节朝向,在键盘操作 qe 或有回弹效果。 保持时间高度相当于锁定视频线。碰撞预值控制碰撞距离,加速度相当于惯性效果,速率相当于速度。点击开始记录进行操控,点击停止记录跟间隔建议为一。用创建样条和创建摄像机完成动画。
269动态图像设计 03:44查看AI文稿AI文稿
03:44查看AI文稿AI文稿大家好,现在学习摄影机动画好,我们首先打开配套场景文件,场景文件,场景文件中我们事先已经绘制好了一条 曲线,将来我们要按照曲线对这个摄像机进行一个运动拍摄,好,因此进行创建,选择摄像机,选择运动摄像机 好,创建完成这个运动摄影机以后,然后这时候首先我们单击运动摄影机后方,这里有一个 按钮,将它激活变为点,然后选择路径样条按键盘点击键删除,选择目标删除, 只保留当前的这个状态,然后选择运动摄像机 后方的这个按钮好,单击这个按钮以后,然后我们把当前的这个样条需要将它拖动,拖动之前我们先展开这个动画,拖动样条到路径样条 a 的后方, 我们继续选择运动摄影机,然后进入到运动摄影机中,将它的高度数值设置为零,将时差数值设置为二百五十,零和三百五十,好,完成操作,然后开始设置动画, 首先我们需要单机选择运动摄影机后面的这个按钮,然后时间轴拖动往第零针激活,打开自动关, 然后设置一下摄影机位置 a 数值, 将摄像机 a 的微 a 的数值设置为零,好,完成之后,最后我们单机记录一个单机记录活动对象,创建第零真实的第一个关键真,继续移动时间轴到第九十真, 然后将他的数值摄影机位置 a 设置为一百,好,出现当前的效果,使完成之后再次单击自动关机正按钮,好,动画就完成了, 然后拖动时间轴或者是单机播放,可以看到当前一个摄影,一个摄影机沿路径进行旋转运动的一个动画,效果 好,由于我们已经对这个渲染参数进行设置设置好了,所以说啊,这里我们只需要进行修改,打开渲染设置,这里边参数都设置好之后,我们只调整针对于动画的一个参数就可以了, 我们这里可以单击输出真范围,这里更改一下,如果说默认当前真选的是一张图像好,我们把它设置为预览范围,这样时间轴上的零到九十针都会被选择,都会被选出来。 好完成之后,然后接着我们可以单击保存, 然后设置一下他的保存的格式,这里我们可以渲染序列好序列通常使用 tj 格式。完成操作之后,我们就可以 勾选左侧的保存,然后单击文件后面的按钮,保存到指定的文件夹中,最后进行渲染就可以了。这就是如何制作一个摄影机动画,并且渲染动画,本节课学到这里。
93胡涂帮 00:36查看AI文稿AI文稿
00:36查看AI文稿AI文稿说个超级干的干货,卸这样非常丝滑的摄像机动画是怎么做的呢?这样大家在某个时间看下动画效果。首先你先给摄像机调好一个角度,点击摄像机把所有的 sy 这一轴跟旋转参数前面的小点呢都刷成红色,然后点击零针下面这个小方块, 然后把插纸改为线性,把时间揉移到最后一针,这回你就可以移动缩放旋转一下你摄影机的视角,但是动作尽量别太大,再点击摄影机,把所有的小点点再刷成红色,播放一下,一个丝滑的摄影机动画就做好了。能能能理解吗?下课。
1479雪人不会化 01:04查看AI文稿AI文稿
01:04查看AI文稿AI文稿大家好,今天来跟大家讲解一下 ccd 中的运动跟踪功能,打开 ccd 后直接把窗口改为木绳垂耳模式,我们可以看到窗口底部出现了运动跟踪相关功能,我们只需要根据列表顺序一次操作即可。首先点击运动跟踪,在影片素材中载入我们拍摄好的视频 重彩样,可以控制画面中视频的分辨率,我们开到最大之后点击完全解析,电脑就会自动追踪视频中的关键点,可以看到左下角有进度条, 解析完成之后,拖动时间线可以看到每个关键点的运动轨迹。接下来我们要确定三维空间关系,我先创建位置约束,找出大致位于画面中心的点进行单击,可以确定整个画面的世界坐标轴,然后创建十辆约束, 选择画面中的两个点进行单击,把这两个点设为 x 轴,长度为一致。 最后创建平面约束,选择画面中的三个点进行单击,我们导入角色模型,运动时间就来看一下, 这样运动跟踪就被我们处理完了。
194尔玉Eryu 03:04查看AI文稿AI文稿
03:04查看AI文稿AI文稿ccd 零基础教程,运动摄像机,先找到上方的摄像机,点击以后呢在这里面找到一个运动摄像机点击一下,而这个时候呢我们就建立好了一个运动摄像机,当你发现你是无法移动他的,那么该如何去移动呢?很简单, 比如说我现在需要把我们的镜头给他移动过来,那么我们可以点击我们的目标,然后呢去移动我们的目标,同时呢在这里还有个路径,现在呢我们需要让我们的摄像机走向前面,该怎么办呢?那么咱们就点击路径,然后呢再把我们路径给他移动出来,而这个时候你就发现我们摄像机就可以进行移动了, 同时呢我们还可以把目标往后面给他移动一点点。今天呢我们就暂时来讲解关于我们摄像机这里面的选项值,那么至于说目标和路径,后期再做讲解,现在呢我们把这些都给他删除了,然后呢我们只留下运动摄像机,那么点击以后,你会发现这里面对 对象物理细节跟之前讲解都是一样的,不明白同学请翻看之前的课程。但是呢在我们运动摄像机后面,这里还有个摄像机图标,点击以后呢在这里第一个为装配值,来到下方,这里有个基地,他这有个叫连接的,什么意思呢?比如说我们在这里呢 找到一个模型,比如说我在这里建一个立方体,点击一下它啊,这个时候我们把立方体给它移动出来,然后呢放到我们的接口这个位置上来, 然后呢点击我们的摄像机图标,把我们的立方体放到我们连接这里啊,这个时候呢你就会发现, 当我们去进行移动,我们立方体时候,我们摄像机会给他动了,他有同学就问了,那么这跟普通摄像机有什么区别呢?区别很大,比如说让我们的这个摄像机动起来,该怎么办呢?把它放到零针上,先开一个针,点击一下它,然后呢把我们这个针放到九十针上,然后呢点击立方体,把 立方体往前面去进行移动,然后呢再进行黑针,现在呢我们只需要把它拿回来,然后呢切换到摄像机视角,然后呢当我们点击播放以后,你会发现我们左右两边会进行晃动的, 这就是我们运动摄像机的使用。然后呢同时呢在我们的里面有很多选项值,比如说我们在我们的摄像机里面点击下它来到装配里面,第一个为我们的高度值,这个高度值指的是我们上下的意思,比如说当我们把这个数值调高以后,你会发现我们的摄像机视角会变高, 同时呢再来的下方这有时差,这里呢对应的是我们的 x 轴、外轴和这轴的。比如说我们通过这个值来调整,你会发现他是左右去进行视觉的调整,然后呢旁边这个值,当我们去调整他的时候,他是上下的调整,然后呢再来到我们旁边的这个值,当你去调整 他的时候,你会发现他会前后进行调整,他包括来到下方这里他有个头部和摄像机,头部的话指的是我们摄像机,你可以通过他来进行旋转等等的,那么摄像机呢?当你调整他,你会发现他是差不多的,其实他这两个之间还是有区别的。比如说我们看过来,在这里你会发现你看这有小人扛着摄像机的, 现在你看当我们去调整头部的时候,你会发现脑袋和摄像机是跟着转的,是吧?但是呢,如果说是当我们去调整摄像机的时候,你会发现他转的就是摄像机本身,这就是头部和摄像机的区别。
102C4D小白教程 01:01查看AI文稿AI文稿
01:01查看AI文稿AI文稿知道 cct 跟踪位移吗?啊?那是啥哎,直接给演示一遍,不要眨眼哦。首先创建一个立方体,尺寸给到二十,添加克隆,命令数量同时改为五,右键给克隆添加模拟标签钢体。 注意哦,钢体是有重力的,播放的时候呢会向下掉落,所以要打开工程面板,快捷键, ctrl 加 d, 重力归零。那跟随延迟的效果怎么做呢?打开钢体标签中的力,跟随位移给到三,点击播放左右移动克隆,就会产生一个跟随延迟的效果啦。 怎么用到案例中啊?给你看一下跟随位移碰撞物体的效果。新建一个球体,半径给到一百五,右键球体添加模拟标签碰撞体,播放左右移动克隆,让他去碰撞球体。可以看到小立方体跟随着轨迹 运动就有一个束缚的效果啦。关闭跟随位移,钢铁和碰撞体就会炸裂开来。哦,原来如此,所以还想学什么,赶快告诉我吧!
1738王小咖


猜你喜欢
- 1.1万阿童穆呀