agv小车差速轮电机咋画
粉丝7144获赞2.4万
相关视频
 00:29查看AI文稿AI文稿
00:29查看AI文稿AI文稿app 插速轮先看视频在汽车直线行驶时,两前轮转速一样,如果当汽车出现转向或者是一个轮胎打滑的时候, 那么就会形成两个车轮的一个差速。我们可以看到,除了两边的差速轮外,前后还安装的随动门。这种驱动方式的优点是灵活性高,对电机和控制精度要求不高。安装差速轮的车一般负重较轻,通常的负重都在一吨或者一吨以下。关注小马,分享更多 ajp 知识,再见。
178海马机器人训练营 01:55查看AI文稿AI文稿
01:55查看AI文稿AI文稿一、单舵轮型单舵轮型 ajv 多为三轮车型,主要是依靠 ajv 前部的一个角轴转向车轮作为驱动轮,搭配后两个随动轮,由前轮控制转向。单 坐轮转向驱动的优点是结构简单,成本低,由于是单轮驱动,也无需考虑电机配合问题。缺点是转向存在转弯半径,能实现的动作相对简单。这种驱动方式多应用在牵引式 ajv 和叉车式 ajv, 适用于大吨位的物料搬运。 二、双舵轮型双舵轮型 atv 为万向型 atv, 通过在车体前后各安装一个舵轮,搭配左右两侧的随动轮,由前后多轮控制转向。双舵轮型转向驱动的优点是可以实现三百六十度回转功能,也可以实现万向横移,灵活性高且具 有精确的运行精度。缺点是两套多轮成本较高,而且 ajv 运行中经常需要两个多轮插动,这对电机和控制精度要求较高。这种驱动方式的稳定性比单多轮更高,同样适用于大吨位的物料搬运。 三、差速轮型差速轮型 ag v 的结构是车体左右两侧安装差速轮作为驱动轮,其他为随动轮,但差速轮不配置转向电机,而是完全靠内外驱动轮之间的速度差来实现转向。 这种驱动方式的优点是灵活性高,且差速轮对电机和控制精度要求不高,因而成本相对低廉。而缺点是差速轮对地面平整度要求苛刻,负重较轻,一般 一般负载在一吨以下,无法适应精度要求过高的场合。大家熟悉的亚马逊 kyve 机器人就是使用差速轮转向 驱动方式四、迈克纳姆轮型这种驱动轮设计新颖,在车骨上安装斜向滚子,通过协同运动以实现移动或旋转。迈克纳姆轮具有十吨以上的载重能力,灵活性高,更适合在复杂地形上的运动。
1255西安爱极客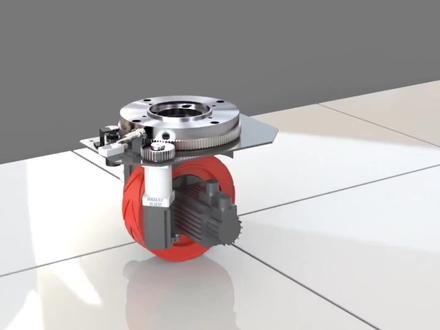 00:37查看AI文稿AI文稿
00:37查看AI文稿AI文稿舵轮是指集成了驱动电机、转向电机、减速机等一体化的机械结构,比较传统 agv 小车差速。操控方法,舵轮集成化、高适配性强协作操控器和低压四伏驱动器,可快速布置 agv 移动式机器人版舵轮。 agv 的特征, 一、负载 agv 车体标准广泛,比较大,承载需求高。二、高速为了满足车间出产节拍需求, agd 的作业速度更快。三、全校在完成传统的转移的一起,还期望 agv 更加灵敏,满足更多的动作。
 06:18查看AI文稿AI文稿
06:18查看AI文稿AI文稿机械设计您知道灌料是干啥的吗?大家好,今天呢跟大家聊一聊灌料这个参数啊,它的概念以及呢我们在做设计的过程当中呢,这个参数到底是干什么用的,它存在的意义是什么? 首先呢灌量呢,其实他就是衡量啊,物体保持原有状态的这么一个参数。 所以说呢,在做设计的过程当中呢,其实往往是在什么呢?就是我的物体从静止到启动以及再停止他加减速的这么一个特性。 所以说我们在做电机选型啊,电机的一个啊计算的时候,我们在选任何一个品牌以及任何一个型号的时候,我们 可以看到厂家都会标注出我这个电机的啊灌量是多少,那我的负载以及我采用任何的一种传动机构呢,我们通过公式呢可以进行一个计算,算出我负载以及传动机构的这个灌量值, 这样的话我跟电机进行一个匹配啊,查询样本,看看电机的灌量是多少,负载和传动机构的灌量多少进行匹配。如果这个匹配不满足我的相应的一个笔直来说的话,那我这样的话,这个电机的选型就是会有问题。 那这样的话呢,那这个参数对于我们来说来说的话,对于工况什么工况考虑要慎重一些呢,就是在我的位置精度,无论是 直线运动还是做旋转运动啊,他的还有速度,特别是启动和停止的加减速啊,加速度要求比较高啊,响应的也比较快。 像这种场合来说的话,我们在选电机的时候要慎重,一定要去看一下惯量的匹配, 在经常我们在选电机呢,往往是通过什么呢?比如说我负载的负载力大小啊,运动的速度进行换算上之后呢,我们看看电机相应的扭距够不够啊,完了,他的这个速度够不够。 所以说我们在选四部电机的时候呢,他的扭矩往往是有两个,一个是呢叫额定扭矩,以及他最 高的最大输出扭矩值,我们我之前的视频呢也经常介绍过,就是我们在计算的时候往往计算的是什么呢?就是我匀速运动的时候,他的额定扭矩对应的是我的四伏电机的额定 值。但是呢,可以看到往往似乎惦记他最大速度的扭矩值呢。其实呃,不同品牌不一样啊,有的时候是两倍的啊额定扭矩,有的时候呢是三倍的额定扭矩。那这个扭矩其实呢,其实往往效合的就是什么呢?就是我启动和停止, 因为他的时间很短啊,电机呢最大输送他可以在短时间能输出最大这个扭矩值。 所以说呢是笑和这个参数。但是呢,刚才刚想提到我计算扭矩和速度时候,往往 往往是通过什么呢?负载力和负载速度。但是灌量这个参数大家可以看到哈, 就是如果说大家没有这个呃计算负载啊这个挂量的这个计算公式可以私信我,可以发给大家。大家可以看到公式当中啊,其实还跟什么呢?还跟我的传动机构的形式,以及我负载外形尺寸,运动的这种方式都有关系。 所以说不同的外形,他带来的计算之后的转动关量他是不一样的。 所以说特别刚才提到的我速度加减速要求比较高啊,我的定位精度也比较高的场合的话,一定要注意选电机的时候要笑合这个参数。 那接下来呢,还有一种情况就是如果说那我怎么去解决我灌量不匹配呢?往往呢有两种方式,一种方式呢,我可以选择大灌量的啊电器,还有一种呢,就是增加减速机, 同样把我驱动端的这个啊驱动管料进行增大,也可以解决我负载匹配的这么一个情况。 所以说在应用过程当中呢,前两天有一位啊,也是我的大学同学寝室的啊,我们在讨论一个工况,就是 ajv 啊,他现在在做一个服务机器人的一个公司,在 ajv 堕轮电机选型哦,我这个同学他就搞不清楚这样本当中这个电机到底对不对啊。进行讨论之后呢,其实我们经常就可以 发现,因为在 aj 位在水平运动方向,在行走匀速走的时候,他电击的这个扭距值其实确实是很小的 啊。其实往往电机在 ajv, ajv 的这个电机来说的话,其实他就是为了匹配什么呢?就是我从静止就启动 ajv 水平运动的 启动停止要满足我的扭矩灌量相应的参数。所以说为什么说在啊,我身边有很多做 ajv 的厂家, 就是说有些客户要求我的 ajv 停止运动的这个目标点位置点要求精度高的场合的情况下,为什么有一些传统环节他满足不了你,比如说我用的 ajv, 我的电机就是用的普通的啊部机电机, 或者是啊塞下一部电机或低压的这种普通电机,那他对于我的啊这个位置,他是很难达到要求很高的这个位置场合。 所以说呢,刚才提到分享这几以下这几点呢,也希望就是说在做设计的朋友们呢,如果说遇到啊,刚才提到这几点,大家可以啊去看一看,把这个参数呢,进行一个效核。
200【经】机【建】设 00:16查看AI文稿AI文稿
00:16查看AI文稿AI文稿我相信很多老铁都知道这个是什么原理。当两个轮子,一个转转,一个反转,转起来很轻松。一个轮子同一个方向转,看起来很吃力。这个是差速原理,但这个平台摆动,我相信很多老铁都不知道是什么原理。知道的点赞,不知道的评论区见。















猜你喜欢
- 3958电力鹰
最新视频
- 1141德践建筑