
粉丝1.1万获赞3.7万
相关视频
 11:50
11:50 17:27查看AI文稿AI文稿
17:27查看AI文稿AI文稿我们首先来看任意禁字计数器中 m 小于 n 的情况,想要构建 m 禁字计数器,我们已经有了 n 禁字的计数器,对应的已经有 n 个状态可以做选择了, 那么我们只需要在 n 个状态中设法跳过 n 减 m 个状态,那么剩下了就只有 m 个状态了。对应的我们只需要让这 m 个状态构成一个循环,就是我们所要的 m 镜子的计数器。 对于 m 进字计数器的这种实现方式,在前边讲相应的计数器的时候已经涉及到了,就比如说我们的 十进字计数器,实际上是在十六进字计数器的基础上做了相应的改进的。首先我们给出了十六进字计数器它的一个状态转换图, 可以发现该十六进制的状态转换图中一共有从零零零零开始到一一一结束,一共十六个稳定的状态。 所谓稳定状态就是该状态在没有计时脉冲的时候,他是保持不变的, 当有一个时钟信号到达之后,他会转换到下一个状态,而不稳定状态指的是不需要时钟信号的作用,他一旦出现这个状态,立马就会跳到其他状态中去。 想要实现稳定技术,那么必须包含十六个稳定的状态,同时还需要有一个进位的输出,是在一一一的时候输出一个高电瓶。 我们以十六进制为基础构建了十进制的基础器,方法就是我们的幺零零幺,并不是跳到幺零幺零,而是截断之后直接返回了零零零零,这个状态 对应的相当于是把幺零幺零到幺幺幺幺这六个状态跳过去了,剩下的十个状态构成了十进支的计数器。由于我们 幺幺幺幺这个状态作为进位输出被跳过去了,所以说需要重新构建进位输出,因此的话,我们选择了零零零零到幺零零幺的末状态幺零零幺作为进位输出的一个状态, 于是的话十六进字向十进字的转换就完成了。 在进行状态跳转的时候,我们并不能够与前边的计数器一样去修改内部电路, 而是呢,需要依靠我们所用到的定型产品他的一些控制输入端来实现状态的跳转。对应的输入端有两类,比如说我们前面 讲到的七四幺六零、七四幺六幺,他们有两个控制输入端,一个是 r、 d、 e 部制零端,另外一个是 l、 d 同步字数端,通过这两个输入端就可以实现状态的一个跳转。 除此之外,还有一些其他的七四、 ls 幺九二、七四、 ls 幺九三, 他们呢也有 rd 和 ld 这两个控制输入端,通过他们也可以实现对应的状态跳转。但是需要注意的是,在这个地方, rd 这两类都是异步之灵, 但是 l d 字数端呢?幺六零是同步字数端,七四 l s 幺九 九二是异步指数端。那么我们怎么用这几个端口来实现状态的跳转呢?它的原理就是说,我们可以把计数器的输出端 q 三到 q 零 作为一组输出信号,直接接一个反馈逻辑电路,在反馈逻辑电路里边做相应的逻辑运算,最终把输出信号接回到制零端或者制数端, 从而根据我们的计数器的输出来选择制零还是制数,从而跳过一定的状态数,实现 m 进制计数器的一个构建。 根据输入单的类型,我们又可以分为下边这么几类方法。 首先是志玲输入端,志玲输入端分为了义步志玲和同步志玲两种,对应的就有义步志玲法和同步志玲法两种了。义步志玲法讲的是义步志玲 的输入端对应的一个制零方法。既然是异步,就意味着我们 在有效电瓶输入的时候,比如说前边低电瓶有效,我们输一个 r d 非等于零。有效电瓶输入的时候呢,不需要时钟信号,直接整个电路的状态 就会置为零状态,比如说前边讲到的幺六零和幺六幺都是属于异步制零的。 除此之外,还有另外一类叫做同步制零法,他讲的是就算我们的控制端接入的是有效的输入电瓶, 但是呢,仍然需要等待时钟信号的到来,经过一个时钟信号之后,整个电路的状态才会被置为零状态。比如说我们用到的七四幺六二,七四幺六三就属于同步至零的。 除了字零以外,另外一个输入端是字数端,仍然是可以根据字数所采用的时钟性 号来分为两类。第一类叫做异步制数,对应的就是说制数端如果有了有效的电瓶输入信号,那么不需要时钟信号的作用,直接可以把电路的状态变为预制数的状态。 比如说讲到的七四 l s 幺九零和七四 l s 幺九幺都是属于异部制数。 除此之外,还有就是同步字数法,同步字数讲的是我们在字数端输入一个有效的电瓶之后, 电路的状态并不会直接被置为预支数状态,而是需要等待时钟信号的到来,只有当时钟信号到达之后, 对应的电路状态才会被置为预制数的状态。前边讲到的七四幺六零和幺六幺就都属于同步制数, 下边我们就来分别看一下这几类跳转的方法他是怎么去实现的,或者说我们在电路设计的时候应该遵循什么样的原理。 首先是制零法,前边我们讲到了想要构建 m 禁止计数器,必须有 m 个稳定状态,对应的一个循环必须有 m 个脉冲, 此外还需要有一个进位输出的状态,因此的话,我们制零法首先就是要选择其。 一般来说制零法,制零法他肯定是回到了零状态,因此的话,我们以 s 零代表零状态,他作为最初始的状态 之后,可以沿着我们 n 进制计数器的这个循环箭头的指向去数 m 个稳定状态出来,于是的话就从 s 零 s 一一直数到了 s m 减一,一共 m 个稳定状态, 我们会发现 m s m 减一就是我们整个技术的末状态了,其中两个状态之间有一个脉冲,一共是 m 减一个脉冲,也就是说 还差一个脉冲就达到了我们前边讲到的 m 进制的一个要求了。 如果是同步字铃,它是需要一个时钟信号的作用才能够跳转的,因此的话直接从末状态跳转到死状态,正好用了一个脉冲, 这样的话,我们整个循环就有 m 个状态, m 个脉冲,于是的话呢,他就是一个 m 进字的计数器了, 但是呢,观察发现 s n 减一,原来 n g 字的进位输出状态在这个地方,呃,但是呢,我们的 m g 字把它跳过去了,所 所以说需要单独的构建一个进位输出的状态,一般情况下,我们都是选择末状态作为进位输出状态,所以说对应的末状态就是 s m 减一, 我们要通过自零端去实现自零,那么对应的反馈状态肯定就是 s m 减一这个状态了,在这个状态的时候跳转回零, 所以说对应的反馈状态就是 s m 减一这个状态了。也就是说,对于我们在任意禁止计数器的构成的时候,需要注意的就是这么四个状态,起始的状态,周末的状态, 产生进位输出的状态,以及外电路反馈逻辑电路所要求的反馈状态。 对于同步字龄来说,我们就会发现末状态进位状态和反馈状态是相同的。 除此之外,另外一个是翼步字铃,翼步字铃的话,我们就考虑一下,如果直接从末状态跳转回初始状态, 翼部呢是没有任何时钟信号的,所以说整个循环就少了一个脉冲,同时呢,末状态不需要时钟信号跳回初始状态,那么他是一个不稳定状态,我们要求的技术是稳定状态, 就是说直接跳转回去,少了一个脉冲,同时少了一个稳定状态, 为了保证整个循环中是 m 个稳定状态, m 个脉冲,因此的话,我们需要借一个状态出来,所以说从末状态往前再增加一个状态到 s m 这个状态, 在此过程中会增加一个脉冲,那么到此我们的 m 状态有了, m 个脉冲也有了, 于是的话呢,就可以从这个不稳定的状态那经过翼步自临,没有任何脉冲信号的作用下回过回到初始状态,于是的话,构成的整个循环中 也是满足我们前边讲到的 m 进字的一个构成。但是和同步不一样的地方,就是说异部需要借一个, 于是的话,初始状态 s 零一样,末状态 s m 减一也一样,进位状态 s m 减一也一样。因为进位必须是一个稳定的 状态,所以说我们选的是末状态最后一个稳定状态,但是反馈状态就必须是以不稳定状态做反馈了,从这个地方跳回去,才能够保证 是一个完整的 m 紧致。如果直接以 s m 减一跳回去,那就是 m 减一进制的计数器了,因为它包含了 m 减一 一个稳定状态和 m 减一个脉冲, 这是字领法他的一个思路。接下来再看字数法,与字数字领法不一样的地方就是字数法,他的初始状态是欲字数, 而预制数呢,可以通过预制数的输入端去进行调整,也就是说初始状态可以是任意一个状态, 我们就假定以 s 键为初始状态, 然后以 s 键沿着箭头方向去数 m 个稳定状态出来,最终数到了 s i 这个地方,它就是我们的末状态。从初始状态到末状态,一共包含了 m 个稳定状态,同时有 m 减一个脉冲。 想要实现完整的 m, 镜子计数器还差一个脉冲。 对于同步字数来说,它可以直接从 s i 跳回到 s 键,在此期间经过一个脉冲的作用,也就是说它可以把差的一个脉冲补回来, 于是的话整个循环就是 m 个稳定状态 m 个脉冲的一个进制了,所以说我们可以得到对于同步字数的 方法来说,初始状态 s 键末状态 si 对应的进位状态与前边不一样的是,我们的这个地方并没有把原来的进位状态跳过去, 所以说可以直接用原有的进位状态 s n 减一去呃输出。除此之外还有最后一个反馈状态,末状态跳回去的,那么末状态就是我们的反馈状态 s i。 如果是翼步之术的话,我们就会发现跟前边的翼步志玲一样,如果直接从 s i 跳回到 s 界,在此期间没有经过一个 脉冲的作用,那么整个循环就是少一个脉冲,同时上边的 si 就是一个不稳定状态了,那么也少了一个稳定状态。整个循环实际上是 m 减一的一个计数器, 为了实现 m 进字,那么就必须得从 s i 再向前借一个不稳定状态出来, 在此期间补了一个脉冲,同时呢,从不稳定状态反馈跳转回去,也不需要增加脉冲。 于是的话,沿着我们红色的这条箭头得到的整个计数器就是包含了 m 个稳定状态 m 个脉冲的 m 镜 计数器了。对应的我们可以得到初始状态 s 键末状态 si 进位状态,利用已有的 这个进位输出的状态 s n 减一,反馈状态呢,则是在 s i 末状态的基础之上加一 s i 加一进行反馈呃自述操作 我们可以看到,呃对应的就是同步的,大家都是默状态和反馈状态是同一个状态, 而对于异部的方法来说,末状态和反馈状态之间要差一个一,一般来说反馈状态是末状态的下一个状态。
195王文俊讲电气 10:32查看AI文稿AI文稿
10:32查看AI文稿AI文稿失控的地铁一秒后就将进站,男人却站在轨道上一动不动。紧接着 大家好,咱们今天来讲任意进制的计数器,前面呢,咱们学了幺六幺啊,幺六三啊等等,他们都是四位二进制的计数器,能够计数的状态要么就是十六个状态,要么就是十个状态。但是在生产应用当中, 有的时候,比如说我只想记录八个状态,或者我想记录二十二个状态,这种任意进制的状态怎么来完成呢?就是咱们这期视频要讲的内容,这期视频的内容非常非常非常简单,简单到连版书都可以不怎么写,咱们轻松的听就可以了。 关于这一小节期末考试的试题,基本上也都在这期视频里面会出现,咱们简单来看一下,假设咱们就以七四叉幺六幺为例 片,幺六幺他一共可以记录十六个状态,如果说咱们想完成的这个任意禁制的计数器,他的膜小于十六, 比如说我想完成十三禁制的计数器,十一禁制的计数器咱们只需要一个芯片就可以完成了,但如果我想记录三十个状态的芯片怎么办呢?咱们需要对幺六幺进行扩展。因此在涉及任意禁制的计数器的时候,首先咱们要判断这个任意禁制的计数器,他要记录的状态的数目是多少,然 然后选择与它匹配的数量的芯片就可以了。那么如何来完成任意进制计数器的设计呢?非常的简单,一共就两种方法,第一种叫做反馈清零法。什么叫做反馈清零法呢?咱 们简单举个例子,比如对于幺六幺这个计数器来说,他一共有十六个状态,分别是零零零零零零一,中间的老学长就不写了啊,一直到幺幺零幺幺幺,然后又回归到零零零。假设咱们要设计一个五 五进置的计数器,那么只需要在这十六个状态当中任意选举五个状态就可以了。所谓反馈清零法,就是从零这个状态开始,也就是从零零零零开始,到零零零幺零零幺零零幺幺零幺零零,这样一共五个状态,再回到零零零零, 当记录到第五个数,也就是零幺零零的时候,这个时候让芯片立马清零,这个就叫做反馈清零法。咱们需要做的就是通过 q 三、 q 二、 q 一、 q 零的状态来控制 清零的信号有效就可以了。当计数器在前面这四个状态的时候,反馈清零的 c、 r 信号都不要有效,只有当状态变成零幺零零的时候,再让反馈信号有效就 ok 了。 思路非常的简单,这是第一种方法。第二种方法呢叫做反馈预置算法,这种方法也非常的简单,它是通过芯片的预置数功能,也就是 l、 d 这个端子来完成计数的。比如说在上面这十六个状态当中,我也是任取五个,我取哪五个呢? 我这么倒着取,也就是幺零幺幺幺幺零零幺幺幺幺零幺幺幺幺,我取这样五个状态来完成一个五金制的计数器,当 q 三、 q 二、 q 一 它们的状态是幺幺幺幺的时候,此时我再来控制 预置数的 l、 d 端子,有效把芯片给预制成幺零幺幺这个状态,这样就完成了一个循环,它就是预置数法,具体的案例怎么来设计呢? 咱们一起看一下书就 ok 了,非常非常的简单。第一个案例在书上的二百三十七页例五杠十三,他用的是反馈清零法,这道题说的是用七四叉幺六三来完成一个六进制的计数器,要求用反馈清零法,既然他要求用清零法,那么他的状态一定会从零开始,而 而幺六三呢,又是一个加法计数器,咱们只需要从零这个状态开始数六个状态,让第六个状态来临的时候,使幺六三芯片的 c r 端,也就是清零端子有效就 ok 了。 咱们来看七四叉幺六三,当 q 的 状态为前五个状态的时候,都不要使 c r 信号有效,只有当 q 的 状态是零幺零幺的时候,此时让 c r 等于零就行了。由于幺六三这个芯片,它的清零端是受时钟上升的脉冲延控制的,它是同步清零, 因此用幺六三完成的反馈清零法,它也叫做同步反馈清零法。下一步咱们要面对的问题就是如何用状态 q 三二一零来控制 c r 端有效,控制的方法也非常的简单,咱们只需要把针织表列下来就可以了。当 q 是 零零零零的时候,此时 c r 端为一高电平无效。 q 是 零零零幺的时候也无效,什么时候有效呢? q 等于零幺零幺的时候,此时让 c r 等于零就 ok 了。 至于剩下的乱七八糟的状态都无所谓,他们不影响 cr 的 状态,通过这个针织表来画出 cr 的 卡诺图,也就是这里从卡诺图再得出 cr 的 逻辑表达式, 从卡诺图写出的表达式是这个,那咱们只需要把 q 零 n 还有 q 二 n 接一个,与飞门连到 cr 端就可以了。 接线图就是这个样子,非常的简单,这道题就设计完了。以上是对于七四叉幺六三来设计的,这里大家需要引起注意的一点是,由于七四叉幺六三它是同步至零,所以刚才咱们的设计方法是同步清零法。 如果还是同样这道题,咱们用七四叉幺六幺来设计,接线图就会发生变化,因为七四叉幺六幺它是 e 不 清零,只要 c r 信号有效,跟时钟脉冲延没有任何关系, q 的 状态马上就会被清零。那如果用 e 不 清零的话,这道题该怎么去做呢?也就是书上二百七十三页的例 五杠十四。用幺六幺还是设计刚才的六进制计数器怎么来设计呢?这里 e 不 清零和同步清零需要考虑的问题就不一样了,假设对于幺六幺芯片来说,咱们还是按照刚才的真值表来完成接线,那会发生什么事情呢? 当 q 三 q 二 q 一 q 零它们的状态来到零幺零幺的时候,此时 c r 会马上输出一个零,也就是 c r 端子有效。 c r 端子有效的这一瞬间,由 由于幺六幺是一不清零,这个时候 q 三 q 二 q 一 q 零的状态会马上从零幺零幺瞬间变成零零零零,此时用咱们肉眼看上去就好像零幺零幺这个状态不存在一样,它仅仅是闪了一下就没了,就有点像咱们数六个数一二三四五六,正常应该是这样来数,一 一二三四五六一二三四五六,完成循环,但如果按照一步清零的方法,就会出现这样一种情况,咱们会数成一二三四五六一二三四五六一二三四五,这个六就被吞掉了,他就没有了,这个是一步清零会导致的问题, 如何来克服这个问题呢?就在这里咱们需要增加一个过渡状态,也就是让零幺零幺这个信号真正的存在,需要使它的下一个状态,也就是零幺幺零这个状态,用这个状态来产生 c r 的 清零信号。所以如果使用异步清零,它的真值表 和同步清零的真值表是不一样的,这里会多加一行,需要用零幺零幺的下一个状态,也就是零幺幺零来 才产生 c r 的 清零信号。因此真值表发生变化,卡诺图也发生变化,表达式也就发生了变化,最后的接线图也就不一样了。对于幺六幺来说是 q 一 和 q 二的余飞,对于幺六三来说是 q 零和 q 二的余飞,其实就相当于是进位了一个状态,这点大家一定要注意。 老学长给大家总结,在这里反馈清零法有两种,第一种叫做同步反馈清零法,第二种叫做异步反馈清零法。对于异步反馈清零法,大家注意,一定要新增一个过渡状态就 ok 了, 也就是一定要在计数器的下一个状态来产生清零信号,这个就是反馈清零法的设计方法。然后咱们来看预制数法,老学长这个制写错了,应该是这个反馈制数法, 它的设计思路是怎样的呢?咱们也通过例题来进行讲解。先看第一个同步反馈制数法,这里立五杠十五,要求用七四叉幺六零和必要的门电路组成一个七进制的计数器。关于七四叉幺六零,咱们前面说过了,它是一个十进制的技术芯片,在这里 它的模式十,那咱们只需要从这十个状态里面任选七个状态来完成计数就可以了。一般来说,对于预制算法,咱们都会倒着数,从 从第十个状态往回数七个,从这个状态开始作为计数的起点,当芯片计数到最后一个状态的时候,用这个状态来控制芯片的预值数端,也就是 ld 端子来完成循环。 因此它的设计方案也非常的简单,只需要把真值表列下来,从有效的状态零零幺幺开始,此时不需要进行质数, ld 为一,一直记七个数, 一二三四五六七,当第七个状态来临的时候,此时让 l d 为零就可以了。由于七四叉幺六零,他的质数端需要始终脉冲延,他是同步质数,所以咱们可以让最后一个状态产生质数的信号,等到下一个脉冲延来临的时候 才会进行质数,这个就叫做同步反馈质数法,在这里也就是力五杠十六,他用七四叉幺九三来完成的计数。幺, 要求组成一个时进制的计数器,七四叉幺九三,它是一个异步计数的芯片,只要 l d 端子有效,就马上会把 d 的 数据给制过去。因此对于异步计数来说,它同样需要一个过渡状态,也就是当计数器完成一二三四五六七八九十十个计数之后,要用下一个过 过度状态来产生使质数信号 l d 有 效的信号,因此它的针织表一定要多加一行,用这个过度状态来产生质数信号。剩下的工作就非常简单了,列针织表,画卡诺图,求表达式,然后一连就 ok 了。老学长把反馈质数法也给大家总结在这里, 对于异步反馈制数法来说,他也需要新增一个过渡状态,用这个过渡状态来产生预制数的信号。以上就是咱们这期视频的重点,如何组成任意禁制的计数器呢?首先要看 你需要记得数是用一片芯片来完成,还是需要用两片芯片来完成。如果需要用两片芯片,第一步咱们先要完成集连,完成集连之后再来看 用清零法还是预制数法呢?用清零法,那他的第一个状态一定是零零零零。用预制数法,一般来说,咱们都会从 进位的那个状态往前倒,以这个状态作为起点。当然实际上无所谓,你只需要用连着的状态就可以了。无论选用哪种方法都一定要注意,如果是采用同步法,就用最末一个状态来产生清零或者置位就可以了。如果用异步法,一 定要用最末那个状态的下一个状态,也就是过度状态来产生置位信号。以上呢,就是本期视频的全部内容,非常的简单,谢谢大家。
483电气工程杨 02:30查看AI文稿AI文稿
02:30查看AI文稿AI文稿接下来我们再给大家讲一下,我们收到计数器以后到底该怎么使用。我们拿到计数器第一个考虑的就是他的摆放位置,我们可以给他放在双手核实的这个地方,然后按开机,长按两秒钟,然后按计数,现在可以开始礼拜了, 那刚刚呢给大家演示的是我们计数器的第一种摆放方式,第二种呢是我自己个人比较喜欢的,摆在我们拜殿的侧边,在侧边的时候呢,他不会影响我的礼拜,那在摆侧边的时候,大家可以把这个支架用上,支架是这样横着用的啊, 支架放的位置呢就是在我们拜垫这里一小扎大概一小扎的位置就可以,然后呢这个计数器的横向位置是我们趴下去的时候,大概在头部的这个地方就行了。那现在我们把计数器把它的计数功能打开,打开计数功能的时候,我们稍微侧一下,不要让它感应到你的身体, 给他技术技术功能打开,然后把它放在我们的架子上,如果说你们平时像我一样,前面会用一个这样的吸汗的东西,那最好能够把我们支架的高度给他架高一点,这样子呢他就不会出现连跳或者是连续感应的情况。 另外呢这款机器它里面用的是品牌的高动力锂电池,像平时不用的情况下,它可以达到三个月的超长待机,那你如果说每天都用的话,也可以用一个月左右,具体的要看你每天的使用时长。除此以外呢,这款机器还有一个非常隐蔽的功能,就是它可以连手机蓝牙,我们 把机器开机以后,打开自己的手机蓝牙,去搜索 g 开头的一个蓝牙就可以直接连接,连接手机以后呢就可以播放手机里面的音乐了, 有时候就是直接用它连接手机蓝牙,播放八十八 f 的 音乐。那我最后想跟大家分享一下,我为什么要推荐这款机器。首先第一个我是从二零二五年的八月份一直到现在一直在用这款机器,我是从它的老版本就开始用了,现在这款是升级款的, 我自己使用下来的感受就是它让我实现了技术自由,我不用再去一个一个用手去按了,让我的大败更加的专注。第二个原因呢就是我联系到了这款计数器工厂的老板, 这个老板呢他自己也是一个修行人,修行人做的东西啊,他就非常注重品质,而且这款技术器他的售后提供的是终身质保,我们看到链接里面其实写的是十年,那是因为平台审核的原因,实际上工厂给我们提供的就是终身质保, 这也是我主要推荐这款技术器一个非常重要的原因,所以姐妹们如果你也想实现技术自由,这款技术器真诚的推荐给你。
31猪猪婷宝儿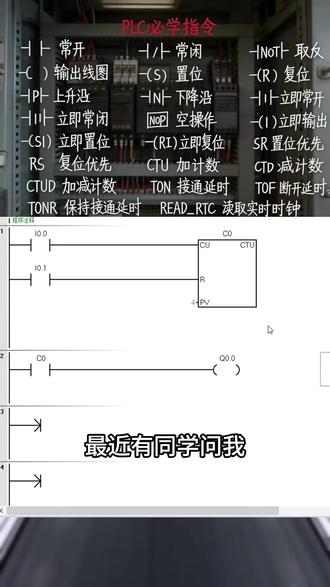 01:08查看AI文稿AI文稿
01:08查看AI文稿AI文稿最近有同学问我计数器怎么在我们的 plc 里运用,今天给大家一分钟讲清楚现在我们这个案例,当我们按下第一个按钮的时候,按四次灯才亮,按下第二个按钮,一按灯就灭, 那我们 i 零点零接我们的第一个按钮 i 零点一接我们的第二个按钮 q, 零点零接我们的小灯,我们 i 零点零接通一次,计数器就记一次,对不对?我们按一下 i 零点零一次, ceo 端会产生一次上升沿,那我们计数器 c 零就记一次数。 我们 p v 端是预置值,当我们计数器计数达到四次的时候, c 零置位,它的常开触点才能导通,让 q 零点零输出小灯亮了。我们计数器我们计时值大于或等于预置值的时候, c 零常开触点接通, q 零点零线圈接通,灯就亮了。所以我们这个计数器 c 零计数四时, c 零置位常开触点导通, q 零点零输出小灯亮,那我们停止的时候,按下 i 零点一, c 零数值复位清零, c 零的常开触点断开, q, 零点零断开,灯就灭了。这就是技术启动和停止的简单程序图,下一期给同学们带来冲床的生产技术怎么编辑?
 11:27查看AI文稿AI文稿
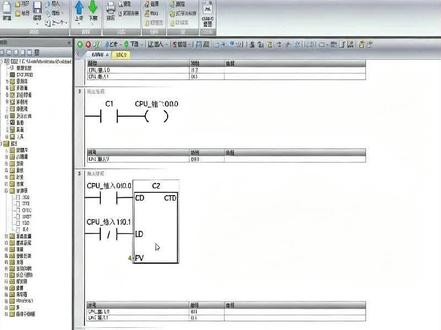
11:27查看AI文稿AI文稿今天咱们分享另外一个指令,计数器,计数器指令呢,在左边可以看到有加技术,有减技术,还有加减技术。咱们先看一个加技术 从里边,在这里边呢输入技术技术器的一个地址,这个地址呢咱们输一个 c 一, 然后这个地方呢是技术器的一个技术脉冲 i 零点零,这是技术器的复位 i 零 i 零点一, 这个地方呢是计数器的一个预设值,咱们设定成四,咱们看一下帮助文件吧,帮助文件呢,提到 每次加计数, ceo 就 这个拐角,也就是这个拐角从 off 转为 on, 也就是它是一个 上升延。 i 零点零,从断开到接通,加技术指令,从当前值开始加技术,当前值刚开始程序运行的时候,当前值是零,零从零开始加技术,就是来一个来一个上升延 它技术技术一加一加一,这样加当前值,也就是 c 一 的当前值大于或等于预设值就大于等于四的时候,因为它要累加嘛,大于等于四的时候,计数器被 c 一 接通,接通,当然了你这个脉冲一直加它这个 c 一 的一个值呢,就一直累积,直到达到三二七六七,技术停止。 在加载过程中呢,你想让它重新重新开始加,这个时候你要进行复位,怎样复位呢?用复位端口 r 接通,也就这个地方接通,咱们可以看一下,咱们要加一段程序, 把 c 这个位呢给一个线圈 q 零点零保存下载, 我用的是一个实际的,实际的 cpu, 当然可以用仿真器,仿真器的使用呢,上一个视频的时候已经讲过了,在这里边呢就不再讲了,运行这个时候呢, c u 这个技术脉冲端口 这个时候是断开的,这个 i 零点一呢,因为我接的是外边的长臂触点,所以说取反他就断开了。这个时候呢,我开始按下 i 零点零对应的按钮,给他一个脉冲,你这个时候可以看到 c 的 当前值在累积,一次, 两次,三次,因为它预设值是四,我再给它一个脉冲的时候,它就变成四,这个时候呢, c 一 这个位呢就变成一了,可以看一下, 这个时候就变成 e 了。 q 五零点零呢,就得电了,我再去按 i 零点零累加,一直累加,一直加到多少呢?帮助文件是三十七六七,只要这个累加值大于预设值,他这个地方就是接通的。这个时候呢,我进行一下复位,复位的时候呢,他的当前值变成零,同时西医的胃也变成零了, 然后 q 零零零呢就失电了,这是加技术,咱们改一下,改成减技术,拖一个减技术,这是 c 一, 那这是 c 二吧。然后这个 cd 呢, 是一个减技术脉冲,那我就 ld 给一个 页设值,改成四,也是四,这个时候呢,复制 到下边只是 c 二。 q 零点可以看一下,刚开始运行的时候呢,减计数器, c 二当前值是零, 同时要注意一下, c 二的位呢,也是零,咱们可以看一下帮助文件,每次 cd 就是 这个拐角,从 off 转为 on 时, 也就是从 off 转为 on 时,一个上升沿的时候呢,减计数指令就会从计数器的当前值开始减。什么是当前值呢?就这 c 二这个当前这个值, 因为来一个脉冲呢, c 二当前值会减一,它首先得有个预设值,如果它接通, ld 接通,就把这个四付给了 c 的 当前值。如果 cd 有 脉冲的时候呢,就从四开始减,达到零时,计数器停止,计数器未 c 二接通, 这个四呢,开始减,减着减着减到零的时候呢? c 二解通了,可以看一下。我先给他一个预设值,我接通 ld, 把这个预设四给到 c 二的当前值, 这个时候呢,当前值是四。我这个时候给这个 cd 的 脉冲的时候,当前值会一直减,减一次,减两次,减三次,再减一次的时候呢,它的当前值呢,就变成零了,它就接通了, 它就接通了。如果这个时候使 ld 接通,让当前值变成四,然后呢, c 二呢,就会断开, 这个时候呢,再进行刚才的循环,来一个脉冲减一,来一个脉冲减一,再来个脉冲减一,再来个脉冲的时候呢,当前值减成零了,它就接通了,然后 再使当前值变成四,它就断开了,这是减计数器。咱们再看一下咱减计数指令, 加减计数指令呢?输个 c 三,这里边呢? cu 呢?因为它是加减,就技术指令,那 cu 呢?就检测是检测到 cu 的 上升延的时候呢?它是当前值累加 cd 这个接口呢?检测到上升延的时候呢,当前值减小, 然后这是复位值。预设值,咱改成四这个地方呢,还是用 i 零点零 这个地方呢?因为没有多余的时间按钮,咱们用一个 m 零点零来代替, 把未输出 q 零点二。 怎么看到帮助文件?刚才忘说了,这个计数器的号呢?从 c 零到 c 二五五,然后再看一下加减计数器,每每次 ceo 从 off 到 on 时就是一个上升延的时候呢, 就会加计数。 c d 减计数,从奥伏到 on 时就会减计数。每次执行计数指令时,都将 p v 的 预设值,就是这个预设值和当前值进行比较,当前值呢,因为它有时候会加,有时候会减,当前值大于等于预设值的时候呢,计数器的位呢,就接通,否则关断,可以看一下是预设值四,那这个时候呢,我开始进行的加,加一 加二,加四的时候呢?当前值这个地方,当前值呢就等于预设值四,这个时候呢, c 三位就是置异了, 置异了,置异以后呢,我再让 c d 这个端口呢去减少,给它一个脉冲,减一 减二减三,发现个问题,只要小于四的时候呢,它就断开了,一直减到零,这个时候呢,再减的话就成负了, 那这个时候让它加,加一加二,一二三 四接通了,这个时候呢,我还让它加五六七八几多十,这个时候呢, c 三一直接通,为什么呢?因为当前值一直大于四,那这个时候呢,我使 m 零点零呢, 它接通的时候就会复位掉一复位掉呢,当前值就是零,当前值是零呢,零小于四,所以说它就断开了,那这个时候呢,在哪使这个 m 零点零等一呢?这边有一个状态监控, 这个时候我来写成一,它就接通了。看一下写一写一的时候啊,当前值呢是零,同时它又断开了,因为零小于四嘛, 这是一个状态监控表,这后期呢,咱还会要分享这个知识点,就通过状态监控表进行的程序的调试,这个就是加减技术,刚才还有个地方,咱不在这复位,把它在这复位 用一个复位指令, 我用一个复位指令呢,给这个 c 一 进行复位,因为它帮助文件里边是这样说的, 当复位输入 r 这个地方接通,或者对 c 一 地址执行复位指令,地址执行复位指令呢,也是通过一个 r 指令进行的复位,咱保存编辑 出错了,看哪有错。第二行能留反向这个地方,还必须加一个指令,是吧?我们加一个 m 零点一吧编辑,哎,通过了,然后下载,这个时候呢,咱用这个 i 零点一去对它进行复位,加一加二、加三加四,好,复位了,然后我再加五加六, 那这个时候呢,我用 i 零点一进行一个复位,可以看一下, 这个时候呢,当前值变成零,然后呢他那个位变成零,这是用二指令进行复位。加技术、减减技术还有加减技术都可以用二进行复位。这里边有一个问题需要注意,用减技术的时候呢,首先在 扫描这个指令之前呢,你需要把这个当前值装载进去,就一定要注意这个情况,这是今天的一个分享。
41工控萤火虫 01:47查看AI文稿AI文稿
01:47查看AI文稿AI文稿幺五零零这个 p、 r、 c 的 数字量输入模块,有的是带着高速计数器的,有的是没有,但是 s 七幺五零零他有专门的这个高速计数器模块,但是我今天说的是这个带高速计数器的这个数字量输入模块如何配置? 主态界面里边选中这个数字量输入模块属性里边有个主态,那主态里边有个叫计数器主态,那个勾一定要选上,勾上以后呢,我们就发现了这个通道零和通道一已经从普通的这个数字量 变成了这个高速计数器的一个输入端,很多人搞不定的就是这里,因为在这个输入模块这个地址这个地方多了一个输入, 我输出现在要明白的是一个叫输入,输入就是要叫做反馈输出,就是我要控制它的意思,它的这个反馈值就是我们所说的这个计数器的值 是放在哪里的?是放在 a、 b、 x 加四的这个连续的这个四个字节里边控制自己的地址是多少,是 q、 b、 x 加四的那个地方。 设备初识化的时候,一定要把这个高速计数器打开,写一个一秒钟采集多少脉冲的这个中断程序,这里呢用 s 七幺二零零呢输出一个脉冲信号来给这个 s 七幺五零的输入端 i 零点零, 在幺二零零这个 p、 r、 c 里面建立一个走,使这个 q 零点零呢在一秒钟呢输出一千个脉冲,然后呢驱动这个幺五零零的 i 零点零,通过 s t 幺二零零发脉冲的形式呢,就给这个 s t 幺五零零注入了高速脉冲信号。
36子豪兄弟工控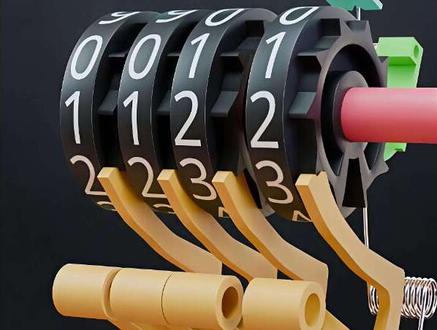 05:08查看AI文稿AI文稿
05:08查看AI文稿AI文稿机械计算器早已退出了我们的日常生活,但它的设计精髓却一直传承下来,我们身边这类简易机械计数器就是最好的体现。只要仔细观察,你就会发现,模拟电表、家用水表、汽车里程表, 就连健身握力器上的技术装置,内部用的都是同款技术结构。如果你平时喜欢记录运动组数,一定要了解,机械计数器本质上就是一台只能做加法的简易机械计算器。它的技术逻辑很简单, 每当最右侧的数字轮完整转满一圈,就会向左边相邻的数字轮进一位,这就是机械进位的核心原理。 这个进位机制靠两个齿轮就能实现。一个十齿齿轮搭配一个单齿齿轮,单齿齿轮每转完整一圈,刚好能带动十齿齿轮前进,一个齿位对应数字就加了一位。 想要让相邻两个数字轮保持同方向转动,只需要在中间加装一个过渡齿轮就行。这个过渡齿轮的齿数多少并不会改变转动比例, 它唯一的作用就是改变旋转方向。在实际工业设计里,如果数字轮有二十个齿,那进位齿轮一般做成两个齿。 过渡齿轮常用八齿,这类规格过渡齿轮的齿数没有严格固定标准,把它做小一点,能让整个计数器内部结构更紧凑小巧。这些齿轮可以紧密排布组合,还能按照同样的结构无限叠加,拓展出更多计数位数。 接下来我们以最常见的四位数计数器来讲解。第一位数字轮连接着主动齿轮,当它从九转回零走完一整个循环时,主动齿轮就会咬合小型进位齿轮, 把转动动力传递给下一位数字轮。我们凑近看这个进位齿轮,能发现它有一部分轮齿更短,还有一圈是光滑圆弧面,没有轮齿。这些都不是做工瑕疵,而是刻意设计的结构。 当不需要进位时,光滑弧面和长轮齿会相互卡位,锁住进位齿轮,防止他随意空转。要是没有这个线位结构,进位齿轮会靠惯性继续转动,很容易让下一位数字多跳一格, 本该只进一位,结果变成进两位。这套精密的咬合设计,能确保每一次进位都精准无误,而且数字轮每转满一圈只会完成一次进位。市面上绝大多数机械计数器都沿用了这套齿轮进位原理, 但经典的手动按压式计数器却是个例外。它最特别的地方就是数字进位系统,毫无关系,里面压根没有任何进位齿轮, 全程完全依靠棘爪和棘轮来实现技术。按下技术按键时,会带动一个支架组建,支架上安装了一排长短不一的棘爪,每按一次按键,支架就会摆动一次, 带动棘爪拨动数字轮边缘的棘轮齿。仔细看,每一个数字轮外圈绝大部分位置都布满了棘轮齿,只特意留出一小段无齿的缺口区域。所有棘爪长短各不相同, 最长的棘爪对应最右侧的个位轮,始终和棘轮齿保持咬合,所以每按一次按键,个位数字必然直接加一。 而短一点的棘爪平时都悬空在对应数字轮上方,不会和棘轮产生接触。当个位数字从九转回零时,数字轮的五齿缺口刚好转到最长棘爪的正下方,棘爪顺势落入缺口向下下沉,带动整个棘爪支架整体下移, 下移的幅度刚好能让第二根棘爪咬合到十位数字轮的棘轮十位数字便自动进一位, 等缺口转移棘爪位置后,最长棘爪重新卡回棘轮,齿上支架随之抬升,第二根棘爪再次脱离咬合,整个结构自动复位。 当计数器计数到九十九时,个位和十位两个数字轮的缺口会同时对齐,两根鸡爪同步下沉,支架下移幅度更大,足以让第三根鸡爪咬合百位轮,完成百位进位。同理 计数到九九九时,三个数字缺口对齐,三根鸡爪同时下沉,触发第四根鸡爪工作,千位数字自动进位。 这款计数器全程没有齿轮,没有进位轮,仅凭极轮缺口和弹簧极爪的精准配合,就实现了全自动进位。顶部的归零旋钮连接着一根贯穿所有数字轮的中心转轴, 转轴上装有对应的复位拨爪,转动旋钮时,拨爪会卡入数字轮内部的极轮齿,带动四个数字轮同步旋转,直到全部归位到零,停下旋钮即可完成归零。 这套吉爪吉轮是单向转动结构,正常按压技术时,数字轮可以独立进位,不会连带归零旋钮一起转动, 反过来按压技术按键也不会带动归零旋钮空转。内部还配有一组腺位吉爪,专门锁住数字轮,只能正向转动,禁止反向倒转。每次数字跳变时都会发出我们熟悉的清脆咔嗒声,每一位数字都能精准卡位对齐。 正是这些巧妙联动的机械结构,让这款计数器既能顺滑归零、技术稳定可靠,还能保证每一次数字切换都精准对位,不出差错。
66星知小课 00:57查看AI文稿AI文稿
00:57查看AI文稿AI文稿在计数器的十位和个位上一共拨四个竹子,可以表示几个数,同学们在做这种题的时候容易出错。好,咱们来看,一共是拨四个竹子, 好,可以同时都在个位上表示四,还可以把十位上放一个来,个位上是三个十三,还可以把十位上放两个竹子,个位上是两个竹子,按照顺序来是二十二。 还可以把十位上放一二三个竹子,个位上放一个好,是三十一。还可以全部都在十位上, 一二三四就是四十,他没有说是一位数还是两位数,所以是一二三四五个选择 c 五个。
15一年级王老师 02:00查看AI文稿AI文稿
02:00查看AI文稿AI文稿编码器和计数器怎么接线,参数怎么设置?这里要分两种情况。第一种情况,用旋转编码器的锐象限记圈数,这是完全可以的,因为 c r 的 技术频率上限是一千赫兹,一千乘六十等于六万,也就是说转速在六万转每分钟以下都是可以的。 这种情况用旋转编码器的 a 向线记长度,这里就要注意了,因为 c r 计数器只有累加功能,接编码器也只能累加而不能加减。而且 c r 的 计数频率上限是一千赫兹,只有当编码器的信号输出频率在一千赫兹以下的场合才可以正常使用,所以必须先计算编码器的信号输出频率。计算公式是,编码器的单圈脉冲数乘轮子的旋转频率。 我这是一个 n p n 长开型的增量式旋转编码器,有 a 向线和 b 向线,单圈两百个脉冲,假设轮子的旋转速度是一秒五圈,两百乘五等于一千,刚好能用, 超过这个速度就不能用了。旋转编码器的红色线接计数器的十二伏端子,黑色线接计数器的零伏端子,绿色 a 向线接计数器的 c p、 e 端子,当然也可以换成白色 b 向线接 c p e 端子。接下来开始设置参数,长按 mod 键五秒,进入菜单修改状态,在这里短按 mod 键可以切换菜单。 首先是 d p 菜单,在这个菜单设置显示的小数位数,这得根据我们的实际需要设置,出厂默认是带两位小数,还可以设置为一位小数 及整数显示。然后是 p 菜单,设置单个脉冲的长度,用轮子的周长除编码器的单圈脉冲数,假设轮子周长三百毫米,编码器两百,脉冲三百乘两百,等于一点五毫米。把 p 值设置为一点五,单位四毫米。接着是 c、 p 菜单,保持出厂设置一千不变。然后是 s、 i、 g 菜单,出厂设置是 n p n o, 我 的编码器也是 n p n o, 这个菜单就不用设置了。 接着是 o、 u、 t 菜单,设置归零模式,总共四种, r 和 c 是 自动归零,选 r 模式到设定值归零和输出同步进行选 c 模式。而手动归零模式 n 和 f 唯一的区别是 n 模式数值到了设定值就固定不变了, f 模式的数值则会一直累积加。然后是 type 菜单,根据自己现场的控制需要设置输出延时时间,设置范围是零点零一秒到五百九十九点九九秒之间。全部设置完成后,先按一下 model 键确定,然后长按 model 键五秒退 出到测量界面,最后设置报警值。在测量界面下按左方向键进入 sv 菜单,设置报警值,根据自己的需要设置,设好之后按下 model 键就会退出到测量界面,这样就全部设置完成了。
29北崎电气 02:12查看AI文稿AI文稿
02:12查看AI文稿AI文稿大家好,我是建筑刘老师,今天给大家分享一下高速计数器脉宽怎么设置啊?好,首先我们看一下我们这个机构啊,我们使用的一个编码器,那这个编码器呢?我们可以看一下啊,是一千 b 的 啊,一千千的,也就是说我们这个编码器转一圈呢,给我们 prc 发一千个脉冲啊,然后我们看一下这个三项一步电机呢是幺三五零圈每分钟,那这个是它的转速啊,我们要算脉宽的时候呢,我们要看一下我们这个机构,也就说我们这个电机最快的时候啊,呃,也就是说带动我们编码器啊,最快的时候啊,最快的时候,然后我们要算一下, 嗯,我们最快的时候每秒呢,给我们 prc 啊,发多少个脉冲?好,那这时候呢,我们一起计算一下啊。好,首先呢我们给大家算一下啊,我,我们电机的转速呢是幺三五零圈每分钟 啊,呃,我们要算数每秒呢,就得出上一个六十秒啊,等于多少呢?等于二十二点五圈每秒啊,好,那这时候呢,我们算数一秒的,这个圈出来了啊,最快的圈出来了,然后呢我们用二十二点五去称上个编码器呢,是一千线的啊,呃,然后我们呢称上个一千 啊,那就等于多少呢?等于二二五零零脉冲每秒啊,也就是说我们最快呢是每秒呢,是两万两千五百个脉冲啊, 那么这时候呢,我们呢可以一秒呢,呃,接受这么多脉冲啊,我们呢,呃,把这个一秒呢分成两万两千五百份啊,那一份呢就是我们的一个脉冲 啊,然后呢我们去看一下啊,我们这个设置的时候呢,他是毫秒和微秒单位啊,那这时候呢,我们得需要换算一下。需要换算一下啊,然后呢是一秒,哎,等于多少呢?一千毫秒啊,等于多少呢?等于一百万 这个微秒啊。好,然后呢这个时候呢用一百万这个微秒,哎,这个时候呢约等于四十四这个微秒啊,那这个时候呢,就是我们 一个麦宽的一个时间四十四为秒啊。好,那我们设置麦宽的时候呢,这个地方呢我们要选择小于四十四为秒的啊。啊,我们接近他要小于他十二点八为秒啊,选择这个就可以了啊。好,你学会了吗?感谢你的支持。
 01:22查看AI文稿AI文稿
01:22查看AI文稿AI文稿今天我们来看一下 excel 里面自动命名的信号规则,那么今天我们讲的是什么呢?按照我们的这个页数,以及他的在当前页的第几个啊,也就是说计数的方式来进行一个命名。那么还是让我们首先放置一下这个未命名的连接代号,然后点中当前页, 选到连接里面的命名,然后新建一个按页名 与计数器命名的方式,然后呢在这个地方我们点击新建,找到最下面这个地方有个页, 然后页的话,这个地方有一个最小位数啊,那么这根据你的项目大小,如果说你的项目有这个一百页以内,那你就写二就行了,然后填充符写零,如果说你是这个一千页以内的,那你这个地方就写三,然后中间我们用一个分割符把它隔开了, 然后选择子计数器,这个地方子计数器和下面这个地方计数器它的一个区别什么呢?子计数器在当前一页进行计数,而计数器呢是针对于整个项目技术啊,所以说我们用这个, 然后同样的我们最小位数先选择两位啊,因为一般情况下我们不可能在一页里面命名会有九十九个,对吧? 好,先去确定,然后同样结果约来一下第四页的第二个,第八个,那么这样的话我们命名就 ok 了。
 04:20查看AI文稿AI文稿
04:20查看AI文稿AI文稿机械计算器或许已淡出日常使用,但他们的精髓仍留存在这类简易机械计数器中。仔细观察就会发现,同款技术机构还藏在模拟电表、水表、汽车里程表里。甚至在握力器上,用来记录次数的计数器也用了它。 机械计数器本质上是只能完成一种运算的简易机械计算器。加一,每当最左侧的数字轮完整转一圈,就必须把十分之一的转动传递给下一位数字轮,这就是进位机制。原理上,用两个齿轮就能实现一个十齿一个单齿, 当单齿齿轮转满一圈,就会让十齿齿轮正好前进一齿,也就是数字加一。为让相邻数字轮同向转动,中间会加一个中介齿轮。 中介齿轮的齿数不影响转动比,他只负责反转转向。实际应用中,如果数字轮是二十齿,进位齿轮可以是二齿中介齿轮。比如用八齿中介齿轮的具体齿数不重要,做的更小,能让结构更紧凑。 齿轮可以这样紧凑排布更多位数,也能用相同结构重复叠加。我们先以四位计数器为例,第一位数字轮连着进位齿轮,当他从九转回到零完成一圈时,进位齿轮就会捏合一个小型进位小齿轮,把动力传给下一位数字轮。 仔细看这个进位小齿轮,你会发现部分齿更短,而且进位齿轮有一段是光滑圆弧面,没有齿,这些设计都是刻意为之。 当进位齿轮不主动转动时,光滑弧面与长齿裂合,会卡住进位小齿轮,不让他空转。如果没有这个线位,进位齿轮的惯性可能让小齿轮转过火,导致下一位多跳一个数。 这套精心设计的配合,能保证每一次进位都精准,且每转一圈只进位一次。大多数机械计数器都用这类进位原理,唯独经典的机械按压式计数器例外。 这种按压式计数器的独特之处在于进位方式,拆开一看就知道它的结构和齿轮进位系统完全不同,根本没有进位齿轮。整套设计全靠棘爪与棘轮实现, 按下技术键时,会带动一组装有棘爪的组件摆动,每按一下,棘爪就会推动数字轮上的棘轮齿。 仔细看,数字轮轮面大部分是极轮齿,只有一小段缺口,没有齿。极爪长短不一,最长的极爪对应最左位数字轮,始终与其极轮齿裂合。 也就是说,每按一下第一位数字直接加一。较短的极爪平时略高于对应极轮,不会裂合。但当第一位数字从九转回零时,它的缺口正好转到第一根极爪下方。 这时第一根鸡爪落入缺口,整个鸡爪架随之下降,刚好让第二根鸡爪捏合第二位数字轮。于是第二位数字加一。 缺口转过去后,第一根鸡爪重新抬升到吉轮尺上,鸡爪架回升,第二根鸡爪脱开系统自动复位计数器。到九十九时,两个缺口同时对齐,第一、第二根鸡爪同时落下,把价体压得更低,让第三根鸡爪捏合第三位数字加一。 同理。到九百九十九时,三个缺口对齐,三根鸡爪落下,第四根鸡爪捏合千位数字加一。全程没有齿轮,没有进位小齿轮,只靠极轮缺口和弹簧驱动的鸡爪精准配合计数器侧面有个复位旋钮,用来把所有数字轮归零。 旋钮连着一根穿过所有数字轮的中心轴,轴上装有四个小鸡爪,分别对应各自的数字轮。 转动旋钮时,棘爪会卡进数字轮的内及轮齿,带动它们一起转,因为四轮同轴会同步转到零对齐,停下旋钮即可。这套棘爪棘轮结构让数字轮在正常技术时能独立前进,不会带动复位轴转动。 这种单向转动保证按技术键时复位旋钮不会跟着转,还有一组指挥几爪,防止数字轮倒转。强制单向转动,也造就了每一位数字精准卡位时熟悉的咔哒声。这些机构配合在一起,让计数器复位顺畅,技术可靠,每一步都精准对齐。 这类机械计数器看似朴素,却传承了一套经典工程设计,在电子时代到来之前,他们曾支撑着计算器、里程表与各类测量仪器。感谢大家的观看,下个视频,我们再见!
109钛科普





猜你喜欢
最新视频
- 2764响铃不停响