米思齐esp8266开发板编程教程

粉丝1701获赞3440
相关视频
 01:28查看AI文稿AI文稿
01:28查看AI文稿AI文稿接下来我们来编写最终的程序,程序也比较简单, 编写完成后我们进行编译上传。最后我们进行测试,首先测试按键 可以正常使用,然后测试手机 app 程序也正常,现在我们就可以正常使用手机来控制门的开和关了。
432三木^_^ 04:02查看AI文稿AI文稿
04:02查看AI文稿AI文稿哈喽,大家好,我是鱼缸,让复杂的事情简单化就是一个玩,今天我们继续来聊这个 esp 八二六六,今天我们要探讨的话题是如何让八二六六上边的 led 灯亮起来。 首先我们就是把八二六六这个天线朝上这样子拿着,然后在他的天线的右上角这个位置有一个 led 灯, 他的他的点亮条件是什么呢?八二六六在出场的时候,他的内部引脚,二号引脚是和这个八二六六这个小灯是连在一起的,当这个二二号引脚是低电瓶的时候,这个灯就会亮。好,我们现在就是来程序上看一下,来对他进行编程, 这是八六六的一个结构图,我们还是先找见它牵线朝上,在这个保护壳的右上角有这个一个这样的一个小灯,它和内部的二号引角是连着的,当这个二号引角成低电瓶的时候,它就会亮。好,我们现在开始操作, 在这个米四七的输输出模块里头,我们找见这个数字输输出管角,我们在这个管角下拉里边找进二号引角,把它设置为低电瓶。好,这个程序我们已经编写完了, 程序编好之后,我们给这个八二六六插上数据线,听见灯笼细声之后,我们在这个设备管理器里边查看一下,在这个端口里边看到这个六 六号端口已经和这个串口连接在一起,我们记住这个六号端口一会在软件里面要用,然后我们在这个软件单口设置里边把六号单口设置上,然后点一下串口, 这个时候我们在软件的左下角可以看到这个六号端口已经打开了,接下来我们点这个上传,把刚才我们编写这一句程序上传到八二六六上面, 现在这个灯是不亮的,我们等程序上传完之后,看一下前后的对比,第一次上传程序可能会慢一些,我们可以耐心等待一下。 好了,程序已经上传成功了,这个时候我们可以看到这个小灯,蓝色的小灯已经持续的被我们点亮了,这个时候我们要看一下这个,我们可以控制这个灯点亮,我们是否也可以让灯闪起来了。 好的,我们继续来看程序,当这个二号引脚成低电瓶的时候,这个灯是亮的,那么反之如果这个二号引脚是高电瓶的时候,灯是不是会灭,对吧?我们现在就是用程序来控制一下灯的亮和灭, 然后我们给他一个延时,就是说当二号引脚是低电 电瓶的时候,这个灯就会亮一千毫秒,也就是一秒钟。接着他会让这个二号引角再给他一个高电瓶,这个时候灯就会灭,然后我们再给他一个时间的控制。 好了,这个程序已经上传成功了,我们现在来看一下它的状态。 好了今天的视频就到这里,谢谢大家。
260鱼缸学电路 04:09查看AI文稿AI文稿
04:09查看AI文稿AI文稿打造一台非常漂亮的纳米叶片面板灯,它不仅拥有着多种的灯光变换,而且还可以跟随着音乐的频率做动态的灯光背景。 有了它,不管是放在家里边做电视的背景墙也好,还是挂在墙上做装饰灯也罢,都将是一个不错的装饰品。其最主要的还是这玩意的制作过程也不是很难,仅需要一块 esp 八二六六的单片机,自己在家也完全可以把它给复刻出来。 这是从网上定制的六边形板子,当然有条件的自己拿几块木板切割出来也行,前提是要保证这些板子的大小都要统一。 接下来准备一块长方形的亚克力透明板,然后再把六边形板子均匀的摆放在亚克力板上,这里可以根据自己的喜好自行设计。注意每块板子之间不要贴的太紧,预留一点缝隙出来,后边光线打出来时才会有层次分明的感觉。 边上的每个角用圆珠笔做好标记,打上点,接着再用直尺把每两个点用线连起来。 好了,这就是已经画好线了的样子。用小钢锯条沿着线的边缘把多余的部分裁剪掉。 而亚克力板的上边都附有着一层保护膜,我们只需要把这一层给撕开,此时就得到了一块已经设计好了的透光面板。 之前的六边形聚光板拿过来外边的保护膜撕开,根据自己喜欢的样式贴上自己喜欢的贴纸即可。总的有七块板子,我这里就只给他贴上了三种颜色。好,现在把板子给粘贴上去,这里也可以根据自己的喜欢自行设计即可。 接下来用六条小纸板制作灯带的模具槽,每条纸板的连接处直接用美纹胶带粘接好,当然这是手工版的,有实力的同学直接用三 d 打印,样子看起来也会更加工整一些。 每一个灯带的六边形框架均用五零二胶水进行粘接,剩下的批量复制操作下来即可。接下来准备一卷 led 彩色灯带,它可以经过编程实现变换多端的动态光学效果。 灯带的一头先粘接在最底下的框架上,然后再沿着边缘把每一个框架都粘牢固定好。这里操作的时候务必把每一条边均铺满到位,不然的话到后边会出现断层的情况,非常难看的哈。 好了,这就是已经铺满灯带的效果。接下来准备一块 esp 八二六六的开发板以及一颗圆孔的直角插头,电源的正负两极焊接好插头的输入导线,同样的灯带的导线拿过来,白色的这根线说通俗一点也就是控制线焊接在开发板的第二根引角上, 负极输出导线从插孔这边数起,同样的焊接在第二根引角上,而正极输出导线的话,直接并连在电源的输入接口即可。而为了能够使大家通俗易懂,我这里就直接标记出来,即使是个小白也能看得明白了吧。 当然秉持电路更加简洁的原则,重新搭建了一块电路板,电源的输入与输出端口全都焊接在了一块电路板上。插上彩色灯带的输出导线,准备两块亚克力板的背墙挂片,左右两边各用五零二的胶水粘牢,固定到位。 插上五伏的电源接口,通过手机 app 就 可以实现远程控制灯光的变化效果,想要什么颜色,只需要在手机上一键控制,非常漂亮的哈。 好,现在把这小家伙挂在电脑的背景墙上,打开电源开关测试看一下效果怎么样。 嗯,样子看起来还是相当不错的哈。不管是静态的灯光也好,还是动态的效果也罢,放在家里边绝对也是一个不错的装饰品。 当然,制作这玩意的过程也不是特别的复杂,其最主要的还是编程问题,如果对此感兴趣的,根据大家的强烈意见,后边我会建立一个粉丝群,无偿的供大家自行摸索。好了,今天的视频就到这里,喜欢的可以给个三连剑,我们下期再见。
366䪏文西纪录 02:32查看AI文稿AI文稿
02:32查看AI文稿AI文稿c 语言和 c 加加只能写控制台程序,他们是辣鸡语言吗?是的,他们太简单了,简单到只用几行代码就能让这三个硬件工作起来了。一起来看看辣鸡语言是怎么控制这几个硬件的。 nice! 首先编程软件用的是 arduino, 想要安装的可以先看这个视频哦,安装完成,我们打开软件,它就长这个样子。然后呢,我们需要把这块 esp 八二六六开发板接到电脑上通电 啊,感觉全身充满了力量,哈哈哈哈!接着我们给三色 led 灯模块接线, 大家记住这几根线颜色和针角的对应位置,然后我们可以发现开发板上面有两排字母,每个字母背后都有一根针角,它的背后长的是这样子的。接着我们用刚刚的三色 led 灯模块,黄线接到符号为 g 的 针角上, 你不要过来,好恶心,快走开哦,疼!接下来呢,绿线接到第一针脚上,红线接到第二针脚上,蓝线接到第三针脚上,不要啊,不要啊 不要啊!哈哈哈哈!然后我们就可以写代码了,先定义针脚的值,然后第一、第二第三设置为输出模式,然后我们在主循环中对第一针脚输出高电瓶 d 二 d 三输出 d 电瓶暂停一秒后,所有引脚输出 d 电瓶再暂停一秒。接着我们就可以点这个按钮把程序翻译上传到开发板上了,经过几秒钟就可以看到红灯一闪一闪的亮起来了。 nice! 接着蜂鸣器像我这样子接线,记住线的颜色,子线接到开发板的 d 四蒸脚上, 灰线接到开发版的三 v 针角上,然后我们就可以定义第一次针角来控制蜂鸣器了,在灯亮起来的时候响起来,灯灭的时候停止 第一针角,目前控制的是红灯,现在我们改为控制第二针角,然后我们就可以点击编辑上传了,等待几秒有惊喜哦! 喂,你能解释我头顶上这个颜色是怎么回事吗?哈哈哈哈,所以 c 元和 c 加加太辣鸡了,太简单了。
7674大话编程 05:25查看AI文稿AI文稿
05:25查看AI文稿AI文稿要让这两个舵机同时运动起来,只需要做对三件事情就可以了,第一选对硬件,第二会接线,第三会使用电脑,使用图形化的编程软件,有手就行,非常简单。好,我们现在就开始, 我们使用到的硬件还是这个 e s p 八二六六这个开发表套装。然后是这个两个舵机, 还有一些杜邦线。我们先说一下这个线怎么接吧?多机是有三根线的,他这个棕色是负极,红色是正极,这个黄色的是信号线。 我们要把这个多机的供电线接在这个八二六六,八二六六这个开发版的这个五伏上边,棕色的线接下边 gd 红色的线接五伏。这里不要接错,因为舵机它的功率稍微大一点,直接用八二六六版载的三点三伏,它的供电是不够用的。然后说一下这个信号线,信号线我们要接在这个八二六六的输出端口上边,接多少?接十二十三吧, 十二十三对应的管角是这个第六和第七,接在这两个管角上,不用管外头的第六、第七,我们知道这个第六,第七是十二管角和十三管角就行了。好,我们现在线接对了,开始进行编程, 我们打开米斯奇的编程软件多机,在执行器里边点执行器电机,然后把这个多机给拖出来。刚才我们用到了两 个管角,先把管角找见十二管角和十三管角, 十三管角,然后我们这个管角上边有两个参数,一个是角度,一个是延时,他是零到一百八十度可以调节的,我们现在就是在调试状态,我们先让他从零度转到这个一百八十度, 先在控制里边给一个初始化,十二拐角是零度,十三拐角也是零度, 出入画之后我们让他这个 转到一百八十度,下边也转到一百八十度,然后给他一个延时 一千毫秒之后再让他从一一百八十度转到零度。 程序就是这样的,很很简单,我们现在就是插上数据线,把它这个程序上传一下 六号银角,看一下串口,串口已经打开, 我们点击上传 好了,程序是上传好了,上传好程序之后,我们看见这个有电脑的 usb 接口 给这个八二六六供电,它是带不动这两个多机的,所以我们现在要把它给插拔掉,然后就是再找一个六到二十四伏之间的直流电源,然后我们给它插上就行了。 现在多机就开始动了,我们发现他在颤抖,他不会动了,这个是什么情况?这个是因为我们刚才设定程序的时候给他的延时太短了, 他他回不来了,所以我们要再给一个一千秒,一千毫秒的延时,我们再把程序上传一下, 再来看一下, 看现在我们加上这个延时之后,这个多机就可以正常的零到一百八十度来回的旋转了。好了,今天的视频就到这里,感谢大家,谢谢大家的收看。
319鱼缸学电路 23:45查看AI文稿AI文稿
23:45查看AI文稿AI文稿这期视频就和大家分享用图形化的编程工具米斯奇来编写我们这个网络遥控车有多简单,只需要图形化的积木的代码一块一块拼搭就可以完成整个小车的程序的设计。 现在我们来简单分享一下他的软件编程部分,我们用到的这个软件是米斯奇,他是一款图形化的编程软件, 用它来给 esp 八二六六编写程序也是非常简单的,这样的图形化代码让人可以一目了然,具体的操作方式会在接下来的视频中进行具体的演示。另外我们还需要了解的一个关键内容 就是 esp 八二六六他可以连接无线网,然后连上无线网。以后呢,我们用到的是一个 mqtt 的服务,在这次的案例中,我们用到的 mqtt 服务是然也提供的 mqtt 服务, 在我们开始操作代码之前,需要对 mqtt 这样一个功能做一个简单的了解。 mqtt 服务就像是个群聊,有权限进入群聊的设备都可以发送消息和接收消息, 当一个设备发布消息后,其他设备都可以收到消息,并执行相用的操作。我们可以按照我们的需要让主控设备发布指定的消息, 被控设备收到相应的消息后执行相应的操作。我们设计了两个群聊,一个群聊用于主控设备发布作业发布消息, 另一个群聊用于被控设备向主控设备反馈消息。这样我们就建立了两个群,也就是两个 mqtt 主体, 一个主体用于主控设备发布消息给被控设备。在我们这个案例中,也就是用燃野手机 app 来发布消息,到这个主题, 被控设备在这个主体只能接收消息,接收到消息后,我们让他按照我们设计的规则执行相应的前后左右停止加速减速这些功能。 在另外一个主体被控设备调整了速度以后,或者做出了其他的一些动作,我们可以让他反馈到我们的这个主体, 这个主体只用于被控设备反馈消息,主控设备只接收消息,这样分为两个主题,实际操作中更方便一些, 不会产生干扰。接下来就给大家简单演示一下具体的用米斯奇来编写代码的过程。 整个程序设计也是非常简单,就是如图所示,现在这个界面 所有的这个遥控车的程序就是用这些积木模块拼搭起来完成的, 我们在实际变成设计的时候,就是可以像这样拖动这里的模块来进行编写里边的程序, 这样这个意思呢?这是一个函数,从函数这个窗口里面拖出,然后这个函数这个功能就是可以在程序其他地方可以被调用,可以被引用。比如说在这边 我让他收到我们的 mqtt 相应的信息以后,执行相应的动作, 这个函数设置的是 app 往前走,然后对应执行的功能就是五四针 角连接的 l 二九八的电机模块,输出的这个电机的速度是一个零减 sb 的,这样代表的是一个数值。 然后这边吊用呢,就直接如果收到的是一个字母,小写字母 w, 他就直行往前走的动作, 往前走的动作具体对应上 l 二九八的电机驱动版就是他连接的是五四针脚,五四针脚 在这边这是五四,这个五四连接到二二九八,然后都用到,就是输出到这个电机的 动作上,相当于只要 mqtt 客户端收到一个 w 字母,然后他就开始执行让这个电机运转的动作。具体的表现就是我们这个遥控车往前走或者往后退, 另外的功能模块向左右左右连接的是零二针角,零二针角在这个 图片上显示,零二就是这边第三、第四对应的这个开发版的针角,然后他这边接到是 l 二九八的 这两个端口,他控制的是另外一边的电机。在我们的案例中,这边这个电机输出控制的实际就是 遥控车的左右转向,比如说正转的时候是向右转,那么他反转的时候就是向左转, 如果我需要让整个车都停车,那么我需要设置五四零二,这两组电机的输出都为零,这样他就可以停止两个电动机了。 米斯奇就是这样一款神奇的软件,他让我们的编程工作更简单,学习起来更省力。实际上这些积木模块他背后的代码就是这样子的。 在我们这个案例中,这样一个用手机远程遥控的遥控车,如果把它转化成代码,他 只有一百五十行的代码,我们把它切换到这样的图形化的编程界面,这样看起来更简单直接,学习起来也是可以轻松上手。左边这六个模块分别代表前后、左右居中, 就是左右转向的电机停转,然后还有所有的电机都停转,就是停车这样一个功能, 其中他的前后因为这个模块他可以设置速度,我们给他设计了一个变量,设计变量的时候,在这边的模块的这个位置 说明一个全局变量, speed 为整数,然后复制为初始的话,让这个速度是一百六十,如果不去修改的话,他就默认是 一百六十。在这里如果没有修改速度的值,那么零减一百六十就是负的一百六十,如果是零加一百六十就是正的一百六十。可以根据实际电机的安装情况, 如果你设置的电机正转,他是往前走,如果你设计的程序接好线以后, 在程序设计上让小车往前走,实际执行起来他却往后退,你可以在程序上把这个地方改一下,把它改成零加 speed, 把它调换一下就可以了。 程序左边控制的是电机的各种运行方式,对应执行起来就是小车前后左右加速减速的一些功能。 右边呢就是接收和发送 mqct 指令的模块,我们可以根据相关的指令,让小车前后左右加速减速执行这样一些动作。 在我们这个案例中用到的是然以 iot 这个平台, 首先这些代码都可以先从相应的位置拖到你的窗口,这个是串口的波特率, 我们通常首先在开始写程序的时候,先把这个模块加进来,加进来以后即使没有用到相关的串口的一些功能,在程序底层他也会有一些串口的 反馈信息输出出来。要先把这个波特率设置好,可以是九六零零或者其他的一些数值。设置好以后,我们就可以通过这个串口的监视器来接收一些串口返回的信息了。 设置好这个串口波特日以后,我们写好程序在上传之后,就可以通过串口的这个位置来接收我们开发版返回过来的一些信息了。 这个模块在声明变量里边 这样拖进来就可以用了, 我们可以设计不同的变量的名字,可以设计不同的 变量类型,这个是我们刚刚用到的变量速度 speed, 这个是用来设置小车运转的速度的, 我们需要的时候直接引用这个变量就可以了。变量的用法也很简单,我们在需要的时候可以直接用这样一个声明全局变量 mqttmsg 为字符串, 但是没有复职,因为我们在下边的程序设计中会反复引用 mqt 消息, 所以我们就可以设置一次这个变量,把它指定成我们接收到的 mqtt 的数值。如果我们后期修改了接收到的主体的名字,那么 我们就可以只改两次这个地方的内容,剩下的这些模块就不用再改了。接下来设计的就是让 esp 八二六六连接无线网络,这里需要填入你的无线网络和密码。 这个模块在网络 wifi 里面第一个设置 wifi 名称和密码, 然后接下来的 mqtt 服务器,在网络 mqtt 这个项目里面,把它拖到右边,然后在这边填上我们用到的燃野的 mqtt 网址,然后端口用户名,密码、项目 id 都留空,因为这个 地址是然而也免费提供的公共的 mqtt 服务,所以他不需要用户名密码和项目 id。 在我之前的测试中, esp 八二六六连接然以 mqtt 服务器,在一段时间没有信息收发的情况下,他会断开连接,然后 esp 八二六六六就会掉线,没有再连接上去。 我用了一个简单直接的方法,让他每隔四十五秒就发送一条消息 到染冶的 mqtt 服务上。具体像 mqtt 发送消息的模块也在 mqtt 这样一个项目里边,把这样一个模块拖到右边,然后放到这个 简单定时器里边,他就会每隔四十五秒,这里设置的是四十五秒发送一个幺二零到主体这样一个主体里边。 这个主体是我们可以自定义的,只要不和别人的成名,那么就不会产生干扰, 因为这个是公共的 mqtt 服务,所以只要连接到这个软野的 mqtt 服务上, 任何人都可以从这一个主体发送消息或者获取消息。所以大家在学习的时候可以用这样的方式。如果在真实的项目实践中,还是需要私有的 mqtt 服务才能安全使用。我们在这里设置好 然野的 mqtt 服务器地址和端口,然后发送消息到这个主体。我们怎么接收这个消息呢?我们可以在安卓手机上安装燃野的 mqtt 客户端, 在客户端上进行相关设置,然后设置一个窗口,用来接收这个主体的消息。 同样,我们也是用染冶的这个 mqtt 手机客户端发送消息到我们的 esp 八二六六开发版上。在 esp 八二六六的开发版上,我们在米斯奇里这样设计他接收消息的功能, 在网络 mqtt, 然后找到当主体接收到 把它拖到空白的窗口, 然后这个 mqtt msg 这样一个变量是我们之前设计过的,我们在变量 mqtt 复制为这样一个模块,把它拖到这个主体接收的位置,在这里我们可以设计我们自己用来接收消息的主体名称, 然后把这个主体把这个模块拖到这里,这个可以杀掉,让他不用打印。下边呢,我们就可以根据 mqtt 接收到的消息来执行相应的动作。这个如果,那么执行的功能,他是在控制模块里边, 把它拖到这个主体接收的框里。 如果 mqtt 的消息这样有一个条件,有一个逻辑,把这个逻辑拖到这边的窗口, 逻辑判断的标准是我们这个 mqtt 的变量接收到的 mqtt 消息是我设置的一个字母, 如果是 w, 我让他如果接收到的消息是 w, 就执行 app 这样一个功能往前走。 第一个根据主体接触到的消息执行相应的功能就已经设置好了。下边因为比较类似,我们可以复制,然后把它拖进来, 拖到他的下边,然后他如果等于 x, 就让他直行倒退, 同样可以再继续复制他如果收到的是 a, 就要让他往直行左转, 以此类推,完成相用的功能。 下面的案例就是我们根据接触到的消息来控制我们的速度,再把我们设置好的速度反馈到我们的 mqtt 服务。 这里用了比较复杂一点的模块, 也是在逻辑这个位置,他要同时满足两个条件才进行速度的调整,第一个条件是 speed 小于二百五十, 然后第二个条件是这个 mqct 消息等于加号, speed 等于要把它放到里边的框里边,等于要用一个数字,数字在数学部分我们可以设置成两百五十五, 把它放到我们设计的这个窗口里边,然后让他执行对速度的调整。 在对速度的调整,我们可以用到数学模块,这样一个模块把它拖到直行的位置, 我们把这个速度 复制一份,把这个变量速度复拖到这个 item 这个位置加等于一的意思就代表把这个速度加一,然后呢我们让他每次都加十吧, 这样当他收到,当他 mqtt 收到加号的时候,同时他的速度在 要小于小于两百五十五的时候,他会把速度的数值加十。 同样我们还需要设置一个减速的功能,把 这样一个模块再给他整体复制一下。 如果我们发送一个减过去,他收到一个减号,那么我们就让他减十。 同时呢他还要再满足另外的条件,就是如果我们要给他指定一个最低速度,如果我们在这里设置一到二十, 当他的速度被调整到一百二十的时候,还可以再减十,如果是减已经减到一百一十了,他就不满足这个条件, 就不能再降低了。但是他满足小于二五五这个条件,我们可以再把速度加上去, 这样就完成了一个简单的调整速度的操作,我们可以把调整后的速度再发送到我们的 mqtt 服务, 我们在上面用到的这个服务名称是在这里把它复制一下, 然后再把这个速度的变量也复制到这里, 我们在这个程序设计的时候,他是从上往下直行,先执行了速度的操作,速度 加湿以后再把现在的竖直下边才执行这样一个动作发送到我们的 mqt 服务。 同样把这一个功能模块也复制到下边一个减速的功能里面,这样不管我们加速减速,他都会把我们设置好的新的速度再通过 mqtc 再反馈回来, 我们就可以通过手机的 mqtt 客户端来进行这样的信息的交互。 其实这个 mqqt 用起来也是非常简单,就使信息的接收和发送,接收到什么信息就执行相用的动作, 执行了相应的动作之后,还可以再发布执行的结果,返回到 mqtt 服务。 所有的功能都设置完成以后,我们就可以在手机上安装燃椅的 app 进行控制了,如果你没有安卓手机也可以, 如果你没有安卓手机,也可以用其他的 mqtt 客户端,电脑上的客户端或者手机上的安卓手机上的苹果手机上的其他的 mqtt 客户端 也是可以用的,只是操作上呢相对来说没有那么便捷,需要每次输入内容,然后再点发送。再 下节课程,我们会用点灯 app 来控制我们的遥控车,点灯 app 在安卓和苹果手机上都可以用,唯一的缺点就是针对免费的用户,点灯的操作反馈起来相对慢一点。 当我们完成所有的程序设计之后,就可以点击上传,把我们的程序上传到 esp 八二六六开发版上去了。
501同学叫我莫同学 02:00查看AI文稿AI文稿
02:00查看AI文稿AI文稿好的各位,不知不觉教学已来到第三期了。 no, 这期的话基本模块已经通过洞洞版验证完毕了。 嗯,多个小东西有这个 esp 八二六六九三二采集到数据之后通过串口 biu 发给他,然后他在无限 biu 发给手机。嗯,功能的话想必通过前两期教学大家都已经知道了,那我简单给大家讲一下吧, 就是湿度吗?它低于你的预制的时候呢,这个水平就会升起一股白烟, 或者当你的温度啊烟雾啊检测到超过你的预值的时候,这个风扇就会 biu 转起来,然后呢蜂鸣器就会哔哔哔哔哔响。嗯,打开了这么多,喏,靠电视供电 off, 这电池还是我当时从实验室耗出来的。 嗯,打开了这么多,接下来给大家功能演示一下。 ok, 各位, 因为手机要来做上位机演示,所以这里就用相机录个视频了,可能画风会有一些复古,不过没事,喏,这是手机上位机喽,你看到温度,湿度,然后还有烟雾的纸, 嗯,这也就是一些预制,下面的话就是他的实时曲线,现在我给温度调一下,现在二十二十六度,我给调低一些。喏,你看到风扇转,蜂鸣器在响,给它变回去,让湿度调高一些。呜,还开始加湿, 烟雾也是一样的,嘟嘟嘟, ok, 这是一个打开界面,嗯,大致就是这些 代码的话,还是老规矩,你们直接私信我,我会发给大家。那么下期的话也是最后一期,直接 pcb 实物组装。拜拜各位,下期见。
69北冥鱼 02:55查看AI文稿AI文稿
02:55查看AI文稿AI文稿使用优喽训练了个小模型,自动化认别蟑螂,追踪并瞄准蟑螂,后期有精力来加个水弹或激光实现打击功能。摄像头比较差劲了,所以云台的 pid 参数调得很小,转起来比较慢,转太快画面拉丝会直接丢失目标。 两个小舵机组成的两个自由度,云台可是网上找的三 d 文件直接打印。摄像头是倒车摄像头改的,画面质量感人, 动一下九拉斯,一言难尽。摄像头上面加了个激光,用于较验实际场景中的瞄准情况。云台的控制及空间坐标反馈使用的是 esp 八二六六开发版模型,暂时还是直接使用电脑跑, 换个好一点的摄像头与云台项目的可能性就可以实现跨越性的提升。简单介绍一下实现的过程,第一步,网上收集几十张小强的图片。第二步,写个脚本,把几十张通过旋转调光、调色,裂变成大概七百张的图片。因为小强的体征其实是很明显的, 所以几百张图片样本就差不多了。第三步,使用勒布林开始无聊的标注样本图片,样品图片如果有条件最好找质量好一点,不同光线、不同背景、不同角度,尽量多样化多一点。标注的时候标注框尽量画准确, 这个关系到后面训练模型的准确度。第四步,使用 yellow 加载标注好的样本图片,开始训练我们的目标模型。 这个过程是很费电脑性能的,我的是十年前的老古董电脑,比较慢,跑了差不多三个小时,如果是显卡稍微好一点, 用显卡来跑,估计也就几分钟就跑完了。 a p 五十至零点九一,识别准确率还是不错的,够用了。 a p 九五至零点四零七, 这个比较差框定位精度差了点,可能找的图片标本质量太差,标注的时候不够细心, 做好这两点应该能改善这个指标,提升模型识别的精度。最后使用 c 写程序跑一下训练好的模型。 s 三二开发版则使用 r 对 no 写断脚本,接收电脑端传过来的数据,进行云台的姿态控制。 云台的控制使用到了 pid 算法,跟无人机姿态稳定算法差不多,这样就算摄像头视角、机型基数有偏差, 只要 p i d 闭合,最终也能实现激光与目标的对齐。捉了两只小强,用水淹灭,然后做了个标本,看一下效果。自动识别追踪瞄准的功能基本上实现了。这个摄像头云台移动一下,整个画面像拉丝一样缠影, 物体移动一下都是千手观音,所以云台 p i d 参数调的很小,云台的反应很慢,调快了画面拉丝,目标丢失。回头看看找一下有没有合适的,替换一下,实现落地自动化,打小墙。
21猪很菜 03:54查看AI文稿AI文稿
03:54查看AI文稿AI文稿大家好,今天收拾屋子的时候呢,发现了这个 esp 八二六六的一个开发牌, 自打买来之后呢也一直没有用过,所以说现在呢打算录制一个如何简单的快速的证明这个板子的好坏的一个视频分享给大家。 首先我们这个板子呢,它这个背面都有标注它需要的驱动 c h 三四零,然后它适合这个波特率九六零零,并且它是可以使用 wifi 进行连接的。然后我们就来根据就是商家给的这个 文件进行简单的配置,看看这个板子是否好坏。我们需要准备的是一个数据线 usb 的, 但是必须要保证这个 usb 是 可以传输, 不是仅供电的那种,我们现在来把它接上 插在笔记本上啊,好,我们开始根据他给的这个安装文档进行简单的判断开发板是否 属于正常。首先呢我们需要做的呢就是需要安装这个 c h 三四零的驱动,这里头我已经安装完毕了,因为他这边有给没有的话,我在网上找了一个这款 就是安装这个开发板驱动的一个软件,很简单,一般他都安装在 c 盘,安装完 c h 三四零那个驱动之后,我们右键 那个计算机选择管理,然后稍等,在管理当中按照他的步骤找到端口,是为了确认我们这个开发板在端口的第几号,我这里正好是 com 三。 确定了这个之后呢,我们需要进行这个开发板的一个硬件烧录。 好的,因为我这个是六十四位的呢,我们就用一个六十四位的 进行收录,这里我们能看出来他已经默认的 com 口,如果不是的话,点这个进行选择,然后选择配置,这边呢都可以公选。然后点击这个齿轮, 我们来找到商家给的这个固定的这一个版本的固件进行打开,然后在这边看到了,然后把这个开成零,成 零,零零零。我们先不要点一键烧写,用开关先点一下这个部位,然后看这个灯闪一下之后我们再进行一键烧写, 我们看到他现在这个板子在闪烁, 这时候就是正在烧写的一个过程。 好,此时已经烧写完毕,记得关注再走哦。
3灯火阑珊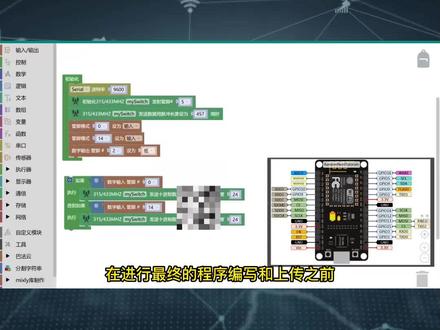 01:53查看AI文稿AI文稿
01:53查看AI文稿AI文稿在进行最终的程序编写和上传之前,我们先来进行一下手机控制端软件的相关设置。因为没有找到合适的 app 程序,所以自己简单制作了一个图标和界面,都比较简陋,但不影响使用。 app 程序是用 ipnit 制作的, 这是一款免费的图形化安卓 app 制作软件,逻辑编辑完成后可直接打包 app, 有需要这个项目文件和 app 的可直接留言。 我们继续来看软件 app 首次打开要先设置密要和主题,这里我们用的是八法云的服务器,所以去八法云申请密要和创建主题。用浏览器打开八法云主页,点击控制台, 选择微信登录,然后截屏保存,然后在微信里用扫一扫扫描截屏图片 会自动注册并登录八法云的公众号,然后在用户中心进入控制台就可以看到获取到的私要。我们还要在 mpott 设备云这个选项里创建两个主题,主题名称要与 app 设置里的主题名称相同,我们在这里分别设置好主题名称和私要并保存, 现在已经与服务器连接成功,因为开发版的最终程序还没有上传,所以设备是离线状态。我们在控制台端创建好主题,注意主题名称要与软件设置的相同。 我们点击开启按钮,这里为了防止误操作,所以设置了一个密码输入框,服务端收到的消息是由密码输入框的内容加开启或关闭命令组成的。比如这里我们刚才输入的密码是两个 a, 开启命令设置的是打开,那么 服务器收到的消息就是 aa 加打开点击关闭按钮也是同样的效果。至于密码的验证,我们是放到开发版端进行的,软件调试完成后,我们来编写和上传开发版的最终程序。
345三木^_^









猜你喜欢
- 1.5万王某工