怎么样拆下西门子V90电机

粉丝538获赞1256
相关视频
 00:41查看AI文稿AI文稿
00:41查看AI文稿AI文稿大家好,我们今天分享西门子 v 九食餐树修改方法。先按 m 建制 pair 啊, 我们以二万九千零一为例,把零改成一,然后按 ok, 然后按 m 翻至 pair 照个上,翻至 s a u e, 然后按 ok, 这样子的话持续二十七秒,此时就可以断电重启,您学会了吗?
135昆山欧控通伺服维修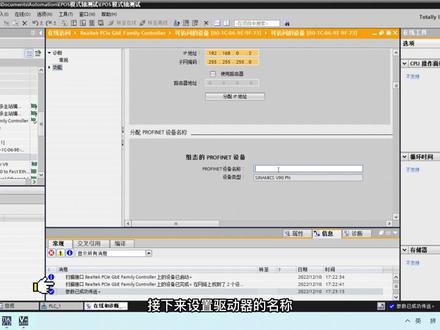 11:53查看AI文稿AI文稿
11:53查看AI文稿AI文稿第一次用西门子 plc, 该如何编程控制四伏做基础运动如果你第一次使用西门子编程,不知道怎么设置和编程,则通过以下步骤来学习如何用 plc 控制为九零四伏。一、学习目标 要实现的第一个功能,控制四幅使能,我用 tlc 的输入开关铃作为使能信号打开,使使能关闭时关使能。 第二个功能,照个加,打开开关,电机正传,关闭,开关停止。第三个功能,照个减,打开开关,电机反转,关闭,开关停止。第四个功能,找原,没找原是无法走绝对位置验证找原功能,选择的是取当前位置为原点。 第五个功能,相对定位运动。第六个功能,绝对定位运动。 二、器材准备准备一个西门子一千两百和一个 v 九零四伏,用网线让 plc 连接到 v 九零驱动器的端口一处,再用网线插到驱动器上的端口二到电脑上即可组网。 三、参数设置电脑编程需要用到两个软件,打开 plc 编程软件。步骤一,新建一个项目,我们要用 ipos 模式验证, 点击组态设备进行下一步操作,选择控制器,选择一千两百系列,我用的是幺二幺四 plc 安全设置,这个没必要加密,如果需要可以勾选。步骤二,添加 v 九零驱动器配置,双击设备状态,再点击网络仕途, 添加 v 九零设备,打开 other filled devices, 打开 profitant aisle, 打开 devices, 找到 v 九零驱动器,往下拉,在最后双击或者拖拽到网络中,点击未分配,添加网络,选择 plce profitant 端口音。 步骤三,找到未分组的设备,双击设备状态,添加豹纹一百一十一,这个豹纹就是 plc 与驱动器通信的协议,类似于 isircat 的 pdo。 步骤四,添加公益对象,注意选择最下面的那个是 apos 模式, 第一个是公益对象模式,起一个名字左轴。这个配置有点类似于欧姆龙的轴设置,注意这边的配置是将会影响显示的单位,我的戴帽机是旋转轴,我这边要选择回转驱动,选择刚才添加未分组的设备, 确定好网络,选择好豹纹,这个是绑定的作用。接下来是机械系统,主要是用来换算单位用的,西门子走位置用的是转换后的单位,不是脉冲。 我旋转一周是三百六十度精度,设置零点零一度,那么对应一个脉冲就是零点零一度。步骤五,接下来设置四幅参数,下拉到在线设备,我们已经将电脑网线插好,所以可以督导在线的设备。网线是插 在我电脑上的网卡的,所以要选择电脑网卡下找设备,这个一定要选择正确,否则找不到设备的。点击更新可访问的设备,它会自动刷新,这时已经找到设备, 双击在线和诊断。如果你的驱动器是第一次设置,可能会没有信息。 首先设置驱动器的 ip 地址,点击分配 ip 地址,接下来设置驱动器的名称,点击分配名称, plc 关联轴是靠 ip 和名称, 下面我们用另外一个驱动器的软件来设置四伏,选择 isnat 连接,选择刚才改的轴 ip 和轴名称来区分轴四伏。第一个要设置的是控制模式,我们用 ipad 模式更改后,驱动器提示需要重启,这时驱动器需要关闭重连,先不保存数据,重启后重新连接。 我们这里设置要和 plc 对应上, plc 用 ipad 模式,四伏也要设置一致,重启比较慢,刷新后再试试。 打开设备调试,接着设置,点击设置 profitant 报文,默认选择的是一百一十一 四伏。第二个参数设置的是细分多少个脉冲转一圈,刚才 plc 公益轴设置的是三万六千个脉冲转一圈,因此四伏这边也要设置一致四伏。第三个设置的是 jog 的速度照壁纸,正转三千 六百表示一秒十圈,不需要设定太大,毕竟是调试用的。其他的还有找员等设置,我们这次就用这些功能。先设置这些,点击下载到此私服的设置就这三步。 四、编程调试,我的戴帽机上面没有触摸屏,要不想用电脑强制,就只能用 io 信号操作。第一步,添加变量,打开 plc 变量,新建一个变量表,用来把 plc 上的 io 信号关联到 plc 中。 这个步骤可以不用在这里写,也可以直接在程序里面边写边添加,写在这里是为了方便理解, 我写的这些电量是完全为了验证开始的目的用的,要注意验证的时候要能对应上过程就加速拨 放了。 第二步,打开魅音主程序, 西门子编程用到的工具就这几个,操作起来还是比较麻烦的。第三步,添加功能快,在右侧的工艺里面找到基本控制, 双击或者拖拽到程序段里再弹出的对话框。名称里面选择左轴,注意这里是关联轴用的,选择不正确则电机不会转。 我刚才已经试过了,名称新定义一个,就会在公益对象哪里又新增一个。第四步,查看手册,看下这个功能快,各个输入输入的赢奖 是怎么应用的。第一个功能,使能,这里说明只要给 enable access 信号,一轴就可以使能。接下来就演示下怎么使能 给第二个影响。 enable access, 我这里直接把输入信号接到这里就好了。 西门子有个好处就是可以直接把变量拖到程序里,比较赞。可以直接选择变量,或者在左侧点击变量,下面详细试图里就显示变量了。直接拖拽到功能块的影脚,直接把基词状态输出到 plc 的输出。第二个功能,照看下手册, 要求一给 mode pass 一个,七要求二轴使能,要求三轴不忙。 jack 速度在四伏控制器里面设置最大速度,要想改变 dog 速度,可以控制 overapp 的百分比,因此要想控制 jog, 要改变模式为期。接下来写程序, jog 一和 jog 二都要给 modipos 复制期。从变量表里面找到 job, 加拖拽到程序里, 接着添加变量,照不减 输出,可以直接给到功能快,因此不需要额外写变量输出。选择变量的时候,第一个变量是功能快,下面就是功能快的变量了。 jock 信号已经写好,最后一,还要给 mode pass 复职期。接下来是第三个功能,找原过程不详细展示了, 根据手册来就可以了。 第四个功能,相对定位。第五个功能,绝对定位细节后面调试的时候可以再展示。 五、验证结果。第一步,选中 plc 后再编一下,看是否有错误,没有报错,只有一个警告。第二步,下载到 plc, 点击开始搜索,选中 plc 后点击下载。如果有多个 plc 的时候,要注意别下载错了, 下载完成后, plc 要设置成运行状态。 第三步,在线调试,选中 plc, 再点击转至在线, 在线后看下 plc 的状态有没有异常,出现错误。轴的配置有问题,检查下轴控制模式,要是 apos 模式正确,可能是其他原因。再看下 plc 这边的什么配置有问题。 这个图标好像是网络没联上。看下 ip 地址和名称,点击更新列表,看看问题出在哪里。这个未分组的设备, 轴的名字忘记改了, plc 跟轴网络连接失败了,需要把轴的名字改成四幅设置的名称。名称改完后,重新下载程序到 plc 内,下载完成后点击在线看看是否还有错误。 现在没问题了,接下来可以验证功能是否没问题了。打开主程序,点击在线监控,查看信号的状态, 我把输入信号零点零直接放到功能块里了,使能中就直接输出到 q 零点零。 接下来是 drug 功能, drug 时需要把 mode pass 的支付值。七、找员 功能,需要给某 depos 复制。四或者五,我这里没有感应器,用的是五,以当前位置作为零点, 当按下开关后,当前位置变成了零,并且输出找原。 ok。 如果用其他方式找原则,需要在四幅软件里面设置找原方式,速度等。 接下来测试下相对运动走,相对运动,需要给 mo depose 复制。一、给 position 复制坐标,给 velocity 复制速度。 接下来测试下绝对运动走,绝对运动,需要给 mo depose 复制。二、给 position 复制坐标,给 velocity 复制速度。 具体程序段如下,好了,到此验证结果已经结束了。 六、总结经验。
3465迪恩讲技术 03:01查看AI文稿AI文稿
03:01查看AI文稿AI文稿各位老铁大家好,今天给大家演示一下西门子 v 九零点动运行如何操作。现在四伏驱动器我已经恢复了出厂设置,恢复出厂设置之后,我们直接进入点动模式,看一下点动能否直接运行,我们找到他的点动模式, 首先找到 f、 u n c 点确认进入 g o g 菜单, 然后再确认进入点动模式,现在我们测试一下点动能否运行,点向上的箭头点击不转,向下的箭头 电机也不转。为什么电动模式不转呢?这是因为现在我们的四伏驱动器没有接线,在没有接线的情况下,需要把四伏驱动器的机定信号正向超限和负向超限 这三个信号强制之一,可以通过参数 p 二九三零零将这三个信号强制之一。我们找一下 p 二九三零零这个参数,这个参数的功能就是数字量输入强制信号, 点击 ok 键看一下现在的参数设置,现在设置的是零,需要把这个参数改成四十六,这个四十六他是一个十六进制的,四十六 改成四十六就把机顶信号、正向超限信号和负向超向信号强制至一楼。注意看现在 red 灯还在闪,点击 ok, 确认更改 好,现在看这个 red 灯已经不闪了,表示四伏驱动器已经准备好了。然后我们再返回去进入点动模式,测试一下 点动能否正常运行。找到点动模式,点击向上的箭头,点击顺时针运转,转速是一百转每分钟。 点击向下箭头,点击逆时针运转,转速是一百转每分钟, 这个速度是出厂默认值,想要改变电机的点动速度需要更改另一个参数 p 幺零五八,我们再把菜单返回去,找到 p 幺零五八这个参数,这个参数的含义就是点动速度设定值 啊,找到这个 p 幺六五八,我们进去看一下,现在速度是默认值是一百,所以刚才的运行速度就是一百转每分钟,现在我们把速度调快一点,改成五百,速度值改成 五百。我们再进到点动模式,看一下他的运营速度,再次找到并进入点动模式,点击 ok 键进入点动模式,点向上箭头,点击以五百转每分钟顺时值运行, 点向下箭头,点击五百转每分钟逆时针运行,现在点动的速度就已经改变了。好,这期西门子 v 九零四伏点动运行测试就给大家分享到这里,感谢观看,请多多指点!
232蔡工聊电















猜你喜欢
- 7418田间农人小妞